基于STM32的船舶防撞預(yù)警系統(tǒng)設(shè)計
2020-08-14 10:00:33葉磊韓金霞
中小企業(yè)管理與科技·中旬刊 2020年6期
葉磊 韓金霞


【摘? 要】為保障船舶航行安全,降低中小型船舶間碰撞事故的發(fā)生率,論文基于STM32和激光模塊設(shè)計了一套船舶防撞預(yù)警系統(tǒng)。本系統(tǒng)通過激光模塊進(jìn)行船舶間航行距離的檢測,實現(xiàn)航行預(yù)警功能,具有成本低、體積小、安裝方便等優(yōu)勢。
【Abstract】In order to ensure the safety of ship navigation and reduce the occurrence probability of collision between small and medium-sized ships, the paper designs a set of ship collision avoidance early-warning system based on STM32 and laser module. The system can detect the sailing distance between ships by laser module and realize the navigation early-warning function. It has the advantages of low cost, small size and convenient installation.
【關(guān)鍵詞】STM32;激光;防撞;預(yù)警
【Keywords】STM32; laser; collision avoidance; early-warning
【中圖分類號】TP399? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?【文獻(xiàn)標(biāo)志碼】A? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?【文章編號】1673-1069(2020)06-0194-03
1 引言
傳統(tǒng)的航行避碰主要依靠工作人員的瞭望,并通知值班駕駛員,由駕駛員根據(jù)航行經(jīng)驗進(jìn)行分析判斷后采取避讓措施,這要求船舶操作人員具有較強(qiáng)的專業(yè)能力和極高的綜合素質(zhì)。隨著航運事業(yè)的發(fā)展,船舶數(shù)量逐漸增多,專業(yè)化工作人員明顯供不應(yīng)求,船舶避碰系統(tǒng)的需求與日俱增[1]。雖然目前國內(nèi)外都已經(jīng)具有比較完善的避碰檢測系統(tǒng),但是這些系統(tǒng)對于中小型船舶,尤其是漁船來說經(jīng)濟(jì)成本太高,無法得到廣泛的應(yīng)用。因此,開發(fā)更加經(jīng)濟(jì)實用、性價比高的防撞預(yù)警系統(tǒng)意義重大。
基于以上情況,本文設(shè)計了一套成本低、體積小、安裝方便的船舶防撞預(yù)警系統(tǒng),為中小型船舶特別是漁船保駕護(hù)航。
2 系統(tǒng)總體方案設(shè)計
船舶防撞預(yù)警系統(tǒng)主要由STM32F103C8T6單片機(jī)、電源、TFmini Plus激光模塊、舵機(jī)、LCD1602、聲光報警、按鍵組成,系統(tǒng)總體框圖如圖1所示。
該系統(tǒng)采用ST公司的STM32F103C8T6單片機(jī)作為核心芯片,單片機(jī)通過UART與激光模塊進(jìn)行數(shù)據(jù)通信。激光模塊每隔一定時間進(jìn)行一次檢測,并將檢測到的數(shù)據(jù)發(fā)送到單片機(jī),單片機(jī)對接收的數(shù)據(jù)進(jìn)行分析處理,如果檢測到有船只駛?cè)腩A(yù)先設(shè)置的安全距離時,系統(tǒng)會進(jìn)行聲光報警,以便使工作人員提前采取有效措施,避開事故易發(fā)區(qū)域。同時,系統(tǒng)會通過LCD1602進(jìn)行報警信息的顯示(主要包括對方來船的速度、方位和當(dāng)前距離),并將有效信息進(jìn)行存儲,為以后船舶航行提供數(shù)據(jù)基礎(chǔ)。
為了增大測量范圍,本設(shè)計將激光模塊安裝在舵機(jī)上,通過舵機(jī)水平方向的轉(zhuǎn)動,帶動激光模塊進(jìn)行水平方向0~180°范圍的測量,以提高系統(tǒng)測量的準(zhǔn)確度。
3 系統(tǒng)硬件設(shè)計
3.1 主控芯片STM32F103C8T6
本設(shè)計的核心控制芯片采用ST公司的STM32F103系列單片機(jī)[2],其是意法半導(dǎo)體在MCU領(lǐng)域推出的非常經(jīng)典的芯片系列,有著強(qiáng)大的功能和豐富的內(nèi)部資源,系統(tǒng)通過STM32F103C8T6單片機(jī)完成對舵機(jī)和激光模塊的控制、數(shù)據(jù)的處理以及數(shù)據(jù)的顯示。
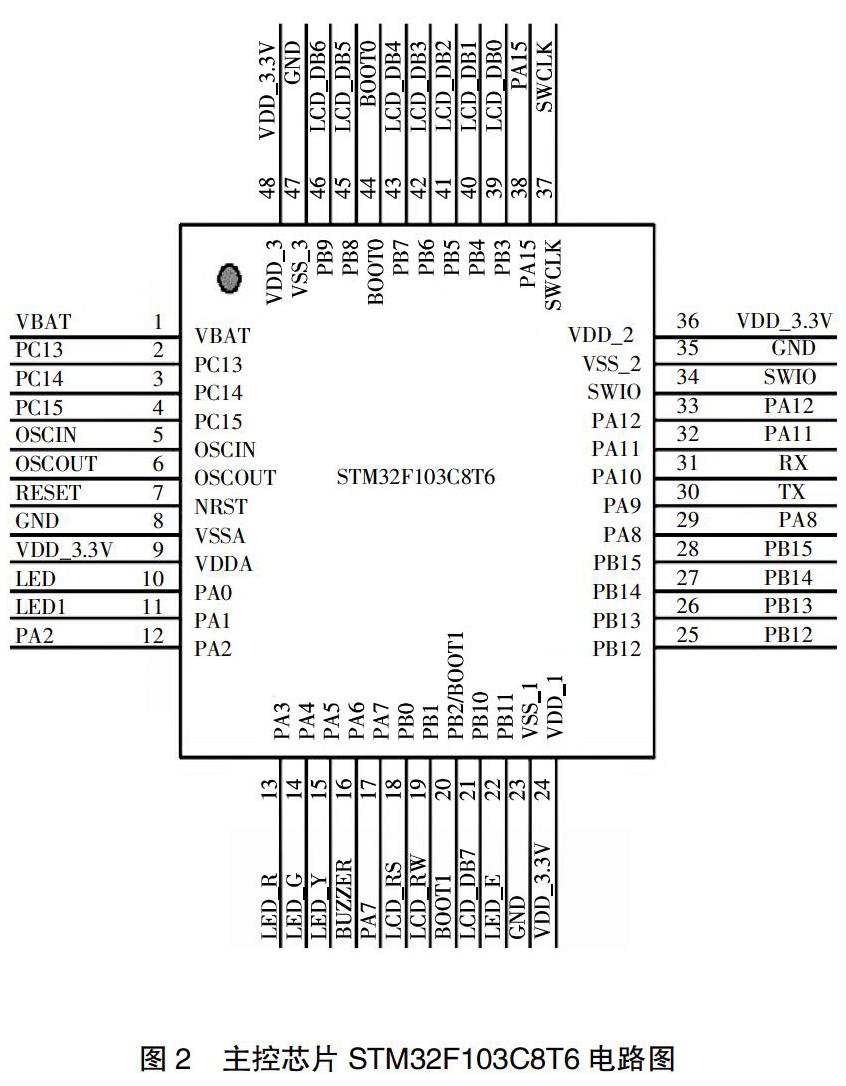
主控芯片STM32F103C8T6電路設(shè)計如圖2所示。
由圖2可知,STM32F103C8T6單片機(jī)[3]的30和31管腳使用的是串口功能,通過串口與激光模塊進(jìn)行通信。系統(tǒng)的顯示單元采用的是LCD1602,STM32F103C8T6單片機(jī)的LCD_DB0-LCD_DB7與LCD1602的8位數(shù)據(jù)口相連接,LCD_RS、LCD_RW、LCD_E與LCD1602的控制管腳相連,實現(xiàn)對LCD1602的讀寫和使能。單片機(jī)的LED_R、LED_G、LED_Y分別是紅、綠、黃三色燈的控制管腳。
3.2 TFmini Plus激光模塊
本設(shè)計采用北醒光子科技有限公司的TFmini Plus激光模塊作為數(shù)據(jù)采集模塊,進(jìn)行船舶間行駛距離的檢測。其是一款小型化、單點測距的產(chǎn)品,基于TOF(飛行時間)原理,配合獨特的光學(xué)、電學(xué)、算法設(shè)計,主要實現(xiàn)穩(wěn)定、精準(zhǔn)、高敏度和高速的距離測量功能。該模塊具有IP65等級防護(hù),測距精度高,對于室外強(qiáng)光、不同溫度、不同放射率等不同環(huán)境下適應(yīng)性更強(qiáng),功耗也比較低。
TFmini Plus模塊啟動后會周期性地向外發(fā)出近紅外光調(diào)制波,調(diào)制波遇物體后反射,通過測量調(diào)制波往返相位差,得到飛行時間,再計算出產(chǎn)品與被測目標(biāo)之間的相對距離[4]。
TFmini Plus模塊公用四個管腳,分別是+5V、GND、RXD/SCL、TXD/SDA。STM32F103C8T6和TFmini Plus模塊之間支持UART和I2C兩種通信方式,本文采用UART的方式進(jìn)行通信。電路原理如圖3所示。
4 系統(tǒng)軟件設(shè)計
4.1 系統(tǒng)軟件設(shè)計
該系統(tǒng)的軟件設(shè)計主要包括系統(tǒng)初始化、參數(shù)設(shè)置、舵機(jī)控制、安全距離檢測、數(shù)據(jù)處理、聲光報警以及數(shù)據(jù)顯示七個部分。
系統(tǒng)上電后,首先進(jìn)行系統(tǒng)的初始化,完成系統(tǒng)時鐘和GPIO口配置,同時,設(shè)置好安全距離,然后啟動定時器,每隔10s進(jìn)行一次完整的數(shù)據(jù)采集。數(shù)據(jù)采集的處理過程如下:
TM32F103C8T6控制舵機(jī)在一個初始位置,然后啟動激光模塊進(jìn)行數(shù)據(jù)測量,STM32F103C8T6對TFmini Plus采集的數(shù)據(jù)進(jìn)行分析處理。如果超過預(yù)先設(shè)置的安全距離,啟動蜂鳴器進(jìn)行聲音報警,三色燈開始閃爍進(jìn)行燈光提示,同時,將獲取到對方來船的位置、速度和距離在LCD1602上進(jìn)行顯示,并進(jìn)行存儲。如果未超過預(yù)先設(shè)置的安全距離,單片機(jī)控制舵機(jī)轉(zhuǎn)動45°的位置進(jìn)行再次檢測,重復(fù)第一次檢測的過程;如果舵機(jī)45°位置處尚未檢測到船只,再控制舵機(jī)轉(zhuǎn)動到90°的位置,依次類推,直至舵機(jī)回到原點時完成一次完整的數(shù)據(jù)采集。
系統(tǒng)的軟件流程如圖4所示。
4.2 激光模塊軟件設(shè)計
TFmini Plus有兩種數(shù)據(jù)輸出格式,即標(biāo)準(zhǔn)數(shù)據(jù)輸出格式和字符串?dāng)?shù)據(jù)格式,這兩種格式可通過指令代碼相互切換。
本文采用默認(rèn)的標(biāo)準(zhǔn)串口數(shù)據(jù)輸出格式,TFmini Plus激光模塊在使用UART通信時要通過上位機(jī)軟件或串口調(diào)試助手進(jìn)行相關(guān)參數(shù)的配置,模塊默認(rèn)狀態(tài)下是串口通信模式,使用時只需向串口發(fā)送5A 08 06 H1 H2 H3 H4 SU(SU為checksum),設(shè)置波特率為115200即可。
激光模塊上傳的數(shù)據(jù)幀,每幀長度為9個字節(jié),包含2字節(jié)幀頭(0x59 0x59)、2字節(jié)距離值(distance)、2字節(jié)信號強(qiáng)度值(strength)、2字節(jié)芯片溫度值(tempture)以及1字節(jié)數(shù)據(jù)校驗和(checksum)。數(shù)據(jù)格式為16進(jìn)制(hex)。具體數(shù)據(jù)編碼[5]如表1所示。
TFmini Plus激光模塊軟件程序設(shè)計流程如圖5所示。
STM32F103C8T6單片機(jī)使能TFmini Plus激光模塊后,TFmini Plus開始進(jìn)行數(shù)據(jù)測量,并當(dāng)單片機(jī)收到激光模塊返回的數(shù)據(jù)后,判斷當(dāng)前的測量次數(shù),如果未達(dá)到測量次數(shù)NUM,將收到的數(shù)據(jù)插入數(shù)據(jù)接收隊列receive_queue(ushort data,uchar length),并調(diào)用數(shù)據(jù)解析函數(shù)analyz_data(ushort *data, uchar length),將距離參數(shù)解析出來存儲到數(shù)組valid_data,進(jìn)行下一次數(shù)據(jù)的接收;如果當(dāng)前測量次數(shù)大于等于NUM時,對valid_data數(shù)組內(nèi)的數(shù)據(jù)進(jìn)行分析,如果測量的距離小于預(yù)先設(shè)置的安全距離時,置位報警標(biāo)志位alarm_flag,當(dāng)單片機(jī)查詢到alarm_flag為1時,系統(tǒng)進(jìn)行聲光報警,并在LCD1602上進(jìn)行顯示,否則等待下一次測量。
5 結(jié)語
本文提出的船舶防撞預(yù)警系統(tǒng)由STM32F103C8T6單片機(jī)、TFmini Plus激光模塊、舵機(jī)、LCD1602等部分構(gòu)成。該系統(tǒng)能夠進(jìn)行船只間安全距離的檢測,當(dāng)船只駛?cè)氚踩嚯x時,系統(tǒng)進(jìn)行聲光報警,提示工作人員采取有效的避障措施,由于成本較低、安裝方便靈活,可以應(yīng)用在中小型船舶特別是漁船上,在船舶安全航行方面能發(fā)揮重要作用。該系統(tǒng)具有很好的擴(kuò)展性,為了保證數(shù)據(jù)檢測的準(zhǔn)確性可以擴(kuò)展其他的傳感器,多個傳感器可以同時進(jìn)行檢測,同時,也可以為該系統(tǒng)添加主控端和上位機(jī)端,更好地實現(xiàn)對系統(tǒng)的控制。
【參考文獻(xiàn)】
【1】周東柳.基于單片機(jī)的船舶主動避碰系統(tǒng)的設(shè)計[D].舟山:浙江海洋學(xué)院,2015.
【2】林玩杰,李水峰,毛立夫,等.基于STM32智能家居控制系統(tǒng)的設(shè)計[J].電子設(shè)計工程,2019(24):176-180.
【3】曾建清.基于STM32的多功能空氣質(zhì)量檢測系統(tǒng)設(shè)計[D].成都:電子科技大學(xué),2019.
【4】鄧威,張廬林,何鑫,等.基于移動互聯(lián)網(wǎng)安防設(shè)備的設(shè)計[J].電子世界,2019(20):141-142.
【5】張志堅.基于MSP430的夜間隧道照明系統(tǒng)的研究[D].太原:山西大學(xué),2019.
