基于STM32智能物流分揀機器人設計
2020-08-19 06:47:29顧鵬飛于朋程張金生主浩唐蕾楊玲玲楊永杰
電腦知識與技術 2020年19期
關鍵詞:物流
顧鵬飛 于朋程 張金生 主浩 唐蕾 楊玲玲 楊永杰
摘要:本文采用STM32為智能物流分揀機器人主控芯片,該系統由車輪、電機、驅動、主控板、循跡模塊、舵機、OLED顯示屏、機械臂、爪子等部件組成,攝像頭由wife模塊進行信號采集控制識別功能,物料識別抓取功能等。本設計可塑性高,智能程度高,實用性強,能夠很好地從根本上解決人工的分揀工作效率低,成本高,容錯率低的問題。
關鍵詞:STM32;分揀;搬運;機器人;物流
中圖分類號:TP24 文獻標識碼:A
文章編號:1009-3044(2020)19-0168-02
開放科學(資源服務)標識碼(0SID):
1 引言
在現代工業生產和作業中,機器人在有效提高產品生產企業的勞動生產率、產品質量與降低生產成本和生產效率等方面起到重要的作用和意義。隨著現代計算機網絡技術的發展和信息社會技術時代的進步,智能工業機器人的物流技術研究和其應用逐漸成為社會廣泛關注的熱點,并且在經濟社會的各個領域中廣泛使用。現如今我國物流和工業生產發展迅速,機器人在物流技術的應用程度逐漸成為企業之間競爭的重要因素之一。同時,這項技術也決定了相關企業的未來,
2 智能分揀物流機器人
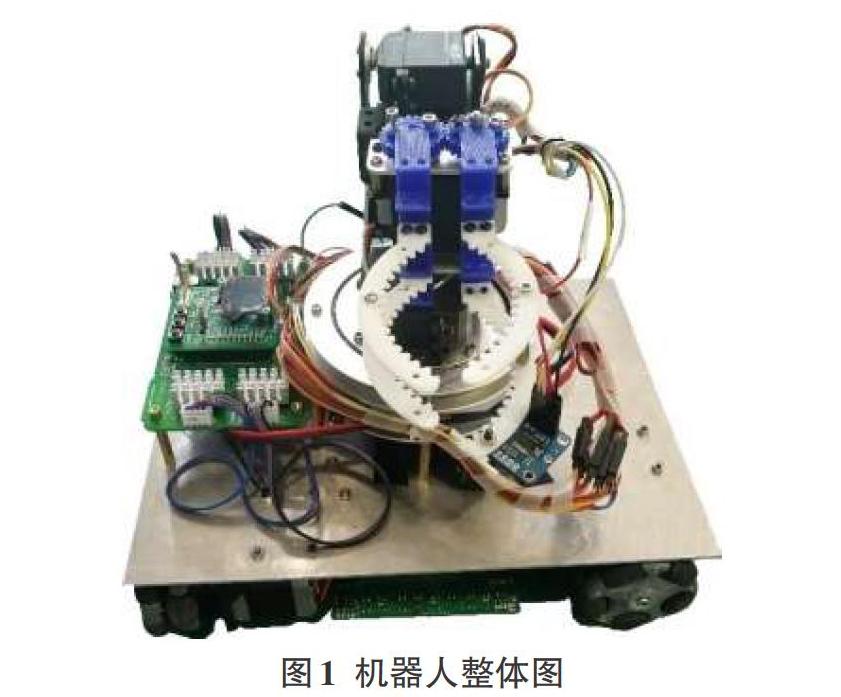
本文以輪式機器人理論為出發點,涉及廣泛,參考相關研究資料,分析現如今所應用在物流機器人上的技術研究現況以及在此方向上所存在的問題。在此基礎上,運用三維建模、嵌入式控制、圖像處理、軟件設計等工程技術搭建與實現智能物流機器人平臺。該機器入主要由車輪、電機、底板、傳感器、驅動、主控板、舵機、顏色傳感器、OLED顯示屏、機械臂和爪子組成如圖1所示。
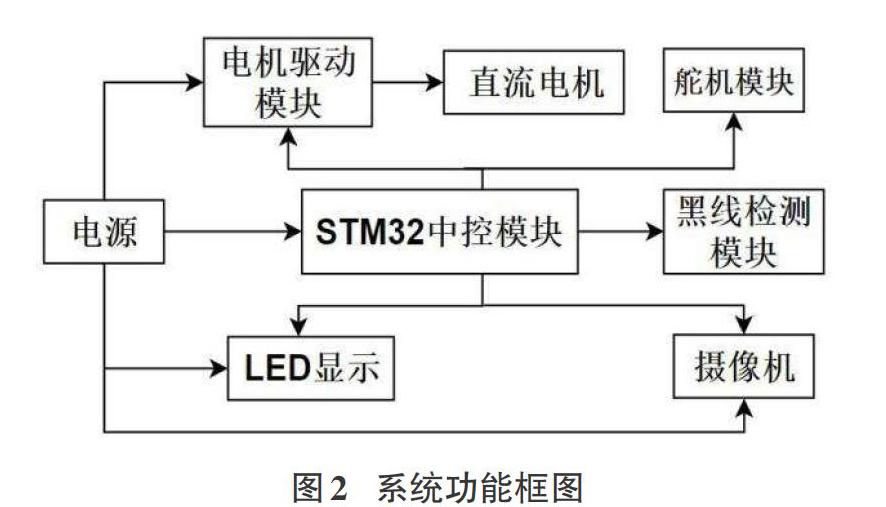
本項目設計的智能分揀搬運機器人,其系統功能框圖[1]如圖2所示,將電源、電機驅動、直流電機、舵機、驅動板、黑線檢測模塊、OLED顯示器[2]、攝像機各部分連接,保證其部分能夠正常工作。
其工作過程為:智能機器人通過循跡模塊、電機控制模塊,實現路徑的識別行走;通過攝像頭掃描二維碼,讀取信息,領取任務:利用顏色傳感器識別物料確定夾取順序;舵機模塊用來控制機械臂,實現物料的抓取與放置。同時,在此運作過程中通過OLED顯示模塊來實現與管理系統的信息傳遞,以此來直觀展現機器人的工作狀態。
根據實際情況,使用電機帶動車輪運動,并在底部安裝兩組灰度傳感器掃描進行定位,使小車能夠實現計數功能和循跡功能,并提升其定位的準確度。在抓取過程中,利用六個舵機控制機械臂,通過調整各部分舵機所控制的機械臂的角度和方向,以及爪子的開合程度,使其能夠準確抓取物料并在運送過程中處于穩定狀態,從而實現機械臂對物料的抓取和搬運[3]工作。
3 系統硬件電路及機械結構設計
3.1 驅動機構的設計
小車的減速箱驅動機構[4]是由直流電機和減速齒輪箱共同構成的。減速箱將直流減速電機、齒輪輸出的直流電機扭矩和轉速轉化為需要的直流電機扭矩和轉速。直流電機動力強勁、效率高、噪音小。根據物流實際場地情況,選取四個麥克納姆輪形成了一個穩定的直流驅動支撐結構。直流齒輪箱電機上的直流電壓大小將直接影響其轉速和扭矩。
3.2 機械臂結構設計
小車的機械臂[5]由6個舵機和爪子組成,舵機由WC9120128的控制信號PWM波形占空比來控制。為了最大限度地控制和提高舵機響應速度,一方面可通過對機械的控制方式進行實現,利用對舵機的控制信號輸出轉矩余量,使舵機的轉角速度和占空比變大,加快舵機的響應速度;另一方面則主要是通過控制對舵機的控制頻率信號和增加PWM波形的占空比頻率來提高對舵機的響應速度[61。因為舵機所轉的響應角度大小是由PWM波形的占空比直接控制的,且其轉動響應速度的大小是由舵機電壓和舵機性能所決定的。
3.3 系統接口及邏輯設計
智能物流搬運機器人主要是由電源模塊、舵機轉向控制模塊、電機驅動模塊、路徑檢測模塊、速度控制模塊和實時顯示模塊組成。本系統選取STM32F103系列為控制芯片[6]。
4 系統結構設計
小車以鋁合金作為底板,在其下方安裝車輪和電機,并在其四周安裝兩組灰度傳感器,通過灰度傳感器檢測黑線,實現四個方向的直線循跡,在主控板上安有OLED顯示屏用以顯示小車運行狀態。在其旁則是機械臂,它位于底板中心位置,在機械臂上安裝了一顏色傳感器[7],用于識別物料顏色。在機械臂底座附近安裝攝像頭,用以識別二維碼領取任務。在小車不工作時,機械臂呈現收縮狀態。
5 系統軟件設計
5.1 智能小車路徑設計
智能識別物料搬運過程中,機器人主要是通過識別二維碼領取物流搬運任務,再根據物料的顏色和搬運順序在任務規定的搬運路徑內進行運動,其中路徑的標準選擇方式有多種,因此機器人就需要優化設計出最佳的運動標準和行走路徑。根據所需路徑設定的運動標準,如果在任務規定的路徑中出現接收搬運指令錯誤,小車任務進行當前物料搬運動作或者進行下一步的物流搬運動作時,會在暫用的搬運路線上行至對應目標區域放置物料,造成了搬運指令錯誤從而嚴重影響小車后續搬運任務的順利執行。
5.2 程序設計以及測試
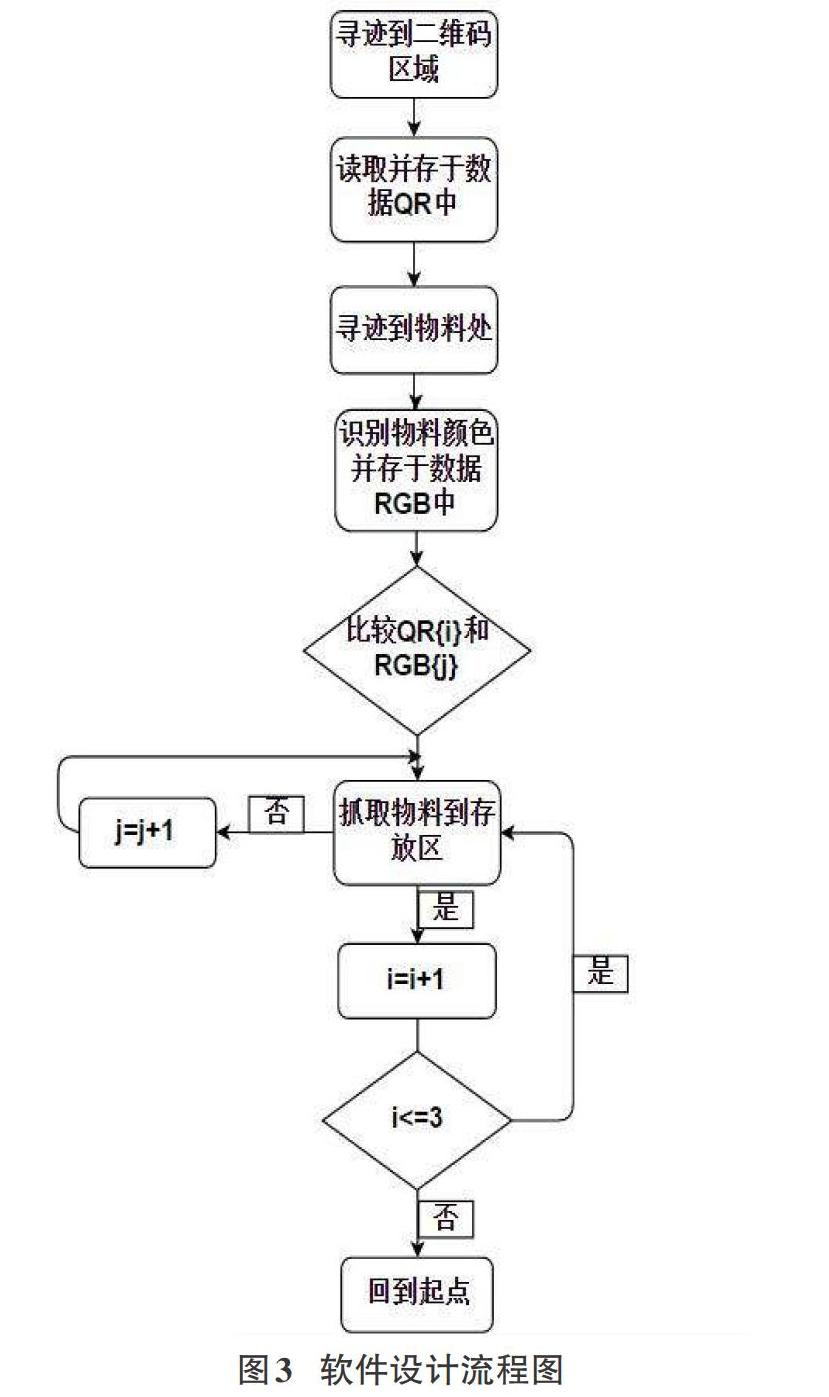
按上述要求對規劃的分揀路徑進行軟件程序的設計,軟件程序設計主要包括小車驅動控制、傳感器控制、小車循跡運動控制、機械臂角度控制和顏色識別等子程序。在此分揀過程中,如果顏色識別判斷正確,則將該目標區域的物料推送給小車到達到對應目標區,然后小車轉彎掉頭進行下一個分揀任務,直至目標區物料全部分揀、搬運完成,返回出發區。具體操作流程如圖3。
5.3 智能搬運機器人的測試
首先將小車放置在出發區,打開電源開關,由出發點出發,按照規劃路線前進。小車到達指定點獲取任務,隨后到達抓取物料的基礎點進行物料抓取,根據信號傳送給顏色傳感器對物料顏色進行識別來確認物料。通過3次識別,抓取和運送把不同顏色的物料準確放在對應目標區即完成全部任務,小車返回到出發區,停止工作。
6 結語
根據市場需求,智能物流分揀機器人[8]選取STM32芯片為主控芯片對機器人進行設計,結合搬運所需系統、結構等方面的考慮,在降低成本的同時,使之能夠實現循跡,彎轉,任務掃描,抓取放置等功能,實現智能化分揀搬運。
參考文獻:
[1]勒國慶,班乾乾.基于STM32的智能小車設計[J].福建電腦,201 8,34(7):123-125.
[2]張素萍,李朝強,張建芬.基于單片機的OLED顯示系統設計[J].福建電腦,2015(8):15-16,61.
[3]黃鈺深,張曉培,梁金耀,等.基于STM32單片機的智能搬運機器人的設計[J].科技視界,2019(12):140-141.
[4]曹文慧,滿翼,朱現偉,等,智能倉儲物流機器人的研制[J].山東化工,2019,48(15):160-162.
[5]賀一烜,柏孟杰,鄭登華.基于Arduino的智能物流機器人的設計與競賽[J].科技風,2019(20):22-23.
[6]張帥,洪文輝,朱鎮坤,等.基于STM32的智能物流機器人控制設計[J].信息技術與信息化,2019(7):98-100.
[7]南京中車浦鎮城軌車輛有限責任公司.一種顏色識別傳感器模塊和顏色識別方法:CN20191066933 8.9[P].2019-11-12.
[8]王洪璽.基于stm32的物流機器人設計[Jl.電子測試,2018(21):42-43.
【通聯編輯:王力】
基金項目:江蘇省高等學校大學生實踐創新訓練計劃項目(201913993008Y)
作者簡介:顧鵬飛(1998-),男,江蘇省鹽城市阜寧縣人,學生,本科,主要研究方向為嵌入式研究;于朋程(1997-),男,安徽省宿州市碭山縣人,學生,本科,主要研究方向為三維建模;張金生(1997-),男,安徽省蚌埠市固鎮縣人,學生,本科,主要研究方向為軟件設計技術;主浩(1998-),男,江蘇省徐州市沛縣人,學生,本科,主要研究方向為圖像處理;唐蕾(1999-),女,江蘇省南通市海安縣人,學生,本科,主要研究方向為圖像處理;楊玲玲(1987-),女,江蘇省南通市人,講師,碩士研究生,主要研究方向為集成電路設計及應用方向;楊永杰(1968-),男,江蘇省南通市人,教授,碩士研究生,主要研究方向為無線通信、自動控制。
猜你喜歡
物流技術與應用(2021年11期)2021-12-27 05:17:08
物流技術與應用(2020年11期)2020-03-11 03:11:36
物流技術與應用(2020年10期)2020-03-10 06:06:12
物流技術與應用(2019年8期)2019-09-04 03:29:56
汽車觀察(2018年12期)2018-12-26 01:05:44
現代企業文化(2018年13期)2018-06-09 08:22:26
消費導刊(2018年8期)2018-05-25 13:20:16
中國公路(2017年6期)2017-07-25 09:13:58
大陸橋視野(2015年17期)2015-12-15 10:07:32
現代企業(2015年2期)2015-02-28 18:45:09
