基于遠洋漁業水產品加工車間智能運輸小車的優化設計
2020-08-21 04:45:30史宇
機械管理開發 2020年8期
關鍵詞:智能
史 宇
(舟山國家遠洋漁業基地建設發展集團有限公司, 浙江 舟山 316022)
引言
目前,遠洋漁業水產品加工車間的運輸裝置一般選用人工或者其他半自動化運輸器械,運輸效率低下且浪費人工成本,若選用其他大型運輸設備,雖操作簡便,裝卸效率高,但是作業前需要繁雜的準備工作,而且由于體型笨重,運轉移動范圍也會受到很大的限制,鑒于上述現實生產作業過程中的種種缺陷與不足,開發一種使用靈活且自動化較高的運輸小車顯得尤為重要[1-4]。
1 智能運輸小車驅動裝置的設計要求分析
針對現如今遠洋漁業水產品加工車間的運輸裝置運輸效率低下,自動化程度低且浪費人工成本,以及其他器械運輸也存在一定局限性等問題與不足。參考國內外其他運輸器械等資料[5-9],確立了智能運輸小車驅動裝置的設計要求,具體為:結構簡單,操作方便;技術要求低,使用靈活;實用性強,安全性能高;全自動操作,可獨立完成運輸過程的前進、后退、停止等指令;經濟劃算,節約成本。
2 智能運輸小車驅動裝置的設計
2.1 智能運輸小車驅動裝置的工作原理
利用AutoCAD軟件設計智能運輸小車的驅動裝置結構如圖1、圖2所示。
在圖1、圖2中,打開控制開關9,智能運輸小車上電機4以蓄電池3為動力,電機4通過聯軸器10的軸動連接,驅動齒輪對12,由于齒輪對12、11、14、15相互嚙合,所以齒輪對可以帶動15轉動,進而帶動聯軸器13轉動,在聯軸器13的作用下,主動輪對6被驅動,在傳動軸8的作用下,從而帶動從動輪對2在導軌1運行。
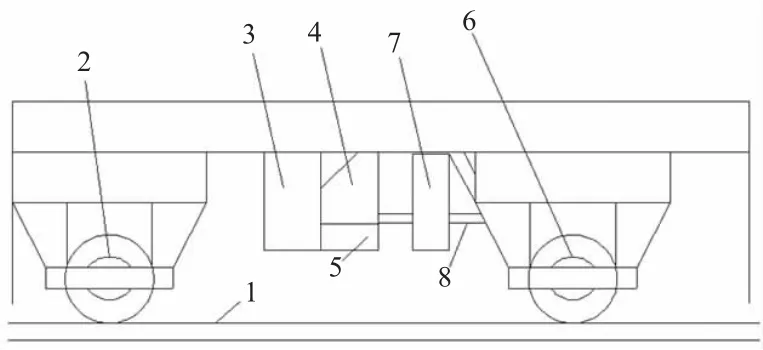
圖1 智能運輸小車外剖面結構示意圖
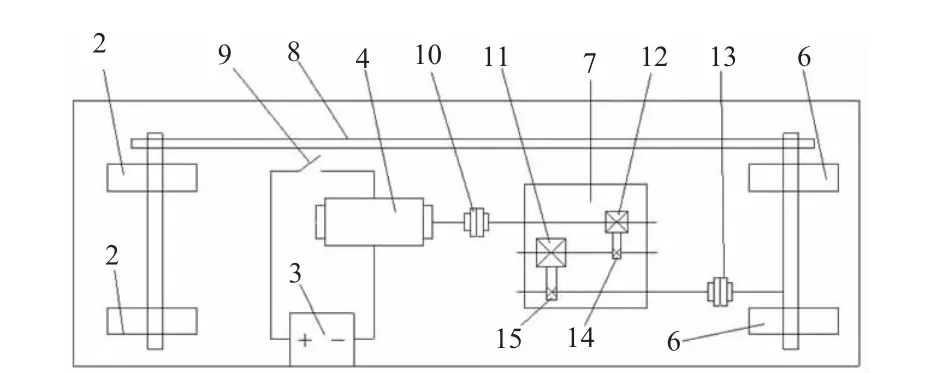
圖2 智能運輸小車內部結構示意圖
在需要減速或停止的情況下,可以通過操縱減速器7來實現。減速器7控制齒輪對12與齒輪對14的嚙合與分離,也就無法驅動齒輪對15轉動,從而使主動輪對無法運行,智能運輸小車便會減速或停止。
2.2 智能運輸小車驅動裝置的前進、后退、運行停止或外力驅動
在圖1、圖2、下頁圖3中,智能運輸小車接通開關9,蓄電池3供電,控制手柄前進,制動器5制動,直流牽引電機4正轉,電機4通過聯軸器(10、13)與減速器7相連。經過減速器7減速,達到需要輸出的轉速,再通過聯軸器(10、13)驅動主動輪對6,進而帶動從動輪對2,從而驅動小車前進,在前進的過程中,可以操作智能運輸小車的電機4運行,實現左轉或者右轉。

圖3 智能運輸小車前進原理圖
在圖1、圖2、圖4中,智能運輸小車接通開關9,蓄電池3供電,控制手柄后退,制動器5制動,直流牽引電機4反轉,電機4通過聯軸器(10、13)與減速器7相連。經過減速器7減速,達到需要輸出的轉速,再通過聯軸器(10、13)驅動主動輪對6進而帶動從動輪對2,從而驅動小車后退。

圖4 智能運輸小車后退原理圖
在圖1、圖2、圖5中,智能運輸小車接通開關9,蓄電池3供電,控制手柄停止,制動器5制動,直流牽引電機4停轉,電機4通過聯軸器(10、13)與減速器7相連。經過減速器7減速,直至減速到停止,從而驅動小車停止。

圖5 智能運輸小車運行停止原理圖
在圖1、圖2、圖6中,在驅動裝置失靈或者停止工作的狀況下,斷開主動輪對6與減速器7之間離合器裝置,即斷開驅動裝置與主動輪對6的聯系,此時用外力可以驅動小車。

圖6 外力作用下智能運輸小車運行原理圖
3 智能運輸小車驅動裝置的控制程序原理
智能運輸過程中動作程序語言(指令:前進、停止、后退、停止):
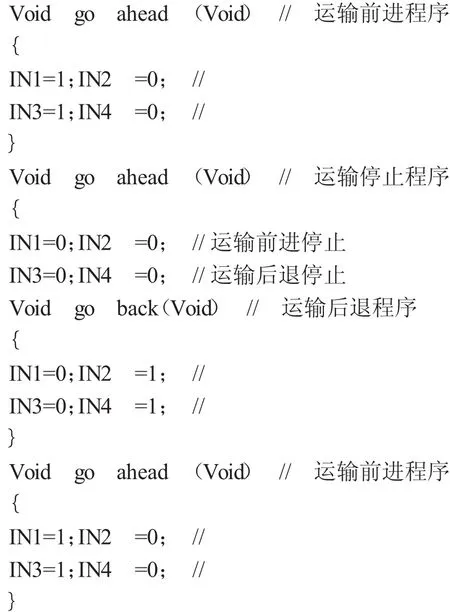
在圖7中,對于設計的智能運輸小車,只需要一個線控式操縱手柄對小車進行操縱即可。手柄上有三個操縱按鈕,即“前進”(SB4),“后退”(SB5),“停止”(SB3)。操作簡便靈活,控制原理如圖7所示,控制回路接通+24 V直流電源。
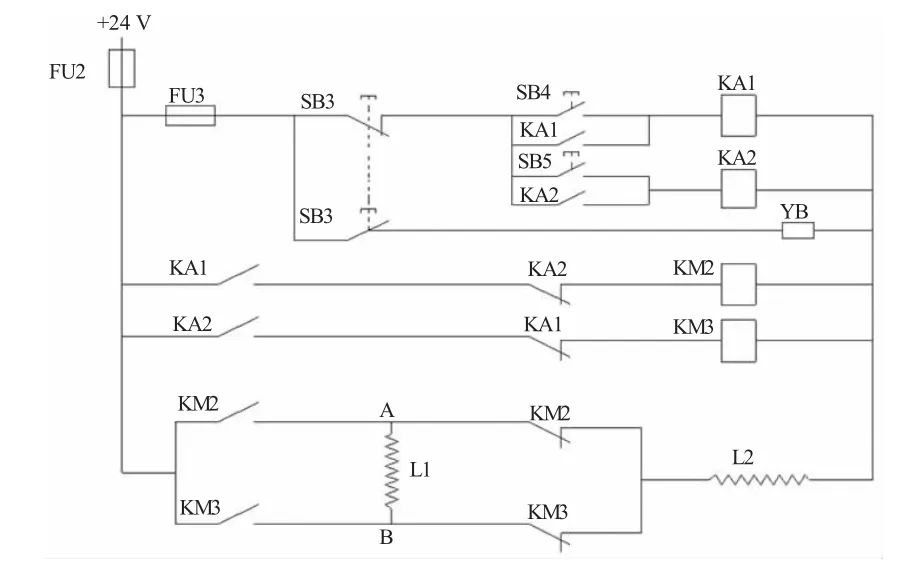
圖7 智能運輸小車驅動裝置的控制原理圖
1)按下按鈕SB4,繼電器KA1得電,其常開觸點閉合,接觸器KM2得電,電機勵磁繞組L1中電流從A到B,電機4正轉,電機4牽引車前進。
2)按下按鈕SB5,繼電器KA2得電,其常開觸點閉合,接觸器KM3得電,其常開觸點閉合,常閉觸點斷開,電機勵磁繞組L1中電流從B到A,電機4反轉,電機4牽引車后退。
3)SB3為停止按鈕,當按下SB3時,制動離合器YB動作,直到電機4停轉,牽引車停止。
4 結論
從遠洋漁業水產品加工車間快速高效的運輸要求出發,針對現有水產品加工車間選用人力或者其他器械運輸等成本較高、效率低下、耗時費力等缺點和不足,設計出了智能運輸小車的驅動裝置,采用智能化操作,有效解決了人工或者其他運輸設備等運輸成本高、設備笨重、運力有限、運轉范圍有限等問題,并從結構、技術、經濟性、操作等方面論證了智能運輸小車驅動裝置的可行性。從實際應用來看,在蓄電池供電時長方面以及智能運輸小車機動性能方面仍需要進一步完善。
猜你喜歡
開放教育研究(2021年3期)2021-05-25 02:41:06
小學科學(學生版)(2020年12期)2021-01-08 09:28:04
裝備制造技術(2020年4期)2020-12-25 05:26:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
能源(2018年4期)2018-05-19 01:53:44