礦井掘進機行走驅動自動跟蹤控制策略的設計
2020-08-21 04:46:06馮博
機械管理開發 2020年8期
馮 博
(山西陽煤寺家莊煤業有限責任公司機運部, 山西 昔陽 045300)
引言
懸臂式掘進機為當前廣泛應用于巷道掘進機的設備類型。傳統掘進機在實際巷道掘進任務中主要由作業人員通過肉眼對設備的行走方向進行糾正。在作業人員人為因素以及周圍環境因素的影響下,常導致掘進機掘進路徑走偏,不僅影響巷道的成型質量,而且增加了巷道的掘進成本,降低了巷道推進的速度[1]。因此,在綜掘設備自動化、智能化的要求下,實現掘進機自動跟蹤技術是十分有必要的。
1 掘進機行走驅動系統研究
懸臂式掘進機行走驅動系統是實現設備前進、后退以及轉向的主要控制分系統,實現掘進機行走驅動系統的自動跟蹤技術是實現其智能化、提升其自動化水平的基礎。
1.1 掘進機行走機構的組成
懸臂式掘進機行走機構組成如圖1所示。
如圖1所示,行走機構主要由拖輪、履帶、導向輪、支重輪以及驅動輪組成。行走機構的動力源為定量液壓馬達,液壓馬達所輸出的動力通過減速器傳遞至驅動輪,從而帶動履帶達到行走的目的。導向輪主要控制掘進機的行走方向,在行走過程中拖輪、驅動輪、導向輪以及支重輪處于一條直線上。當掘進機兩邊液壓馬達以相同速度驅動履帶時,掘進機可完成前進和后退的運動;當兩邊液壓馬達以不同速度驅動履帶時,掘進機可實現向左或向右的運動[2]。

圖1 掘進機行走機構結構示意圖
1.2 掘進機行走機構液壓系統
掘進機行走機構的液壓系統組成如圖2所示。
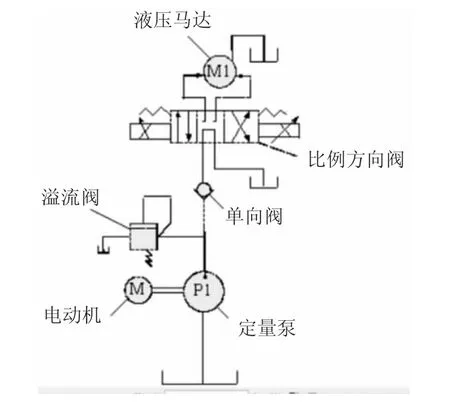
圖2 行走機構液壓系統原理圖
如圖2所示,掘進機行走機構液壓系統由液壓馬達、比例方向閥、單向閥、溢流閥、電動機和定量泵等組成。其中,比例換向閥為行走機構液壓系統的核心,通過比例換向閥可控制液壓油的流向從而實現對設備前進、后退的控制;通過控制比例換向閥的開口大小實現對液壓馬達速度的控制,從而實現對設備轉向的控制。因此,通過掘進機當前工作狀態及掘進機巷道的現狀實現對比例方向閥的控制是實現掘進機行走機構自動跟蹤功能的關鍵。
2 掘進機行走機構自動跟蹤控制
2.1 掘進機行走機構自動跟蹤理論分析
掘進機行走機構的自動跟蹤控制主要保證掘進機行走的中心線按照巷道的中心線推進,從而保證掘進機截割距離巷道兩側的距離一致,盡可能地避免掘進機出現超挖和欠挖的現象。簡單地說,實現掘進機行走機構自動跟蹤控制的核心在于保證設備在直線前進、后退以及左轉、右轉轉彎工況下均能夠確保其行走的中心線與巷道中心線的偏差不大于0.05 m[3]。
當掘進機行走中心線與巷道中心線的偏差大于0.05 m時,通過控制掘進機兩邊液壓馬達的速度差實現設備的左轉或者右轉,從而保證行走中心線與巷道中心線的偏差保持在一定范圍內。因此,掘進機行走機構自動跟蹤控制的核心在于對兩邊行走機構速度的控制。為此,設計如圖3所示的速度模糊控制系統。
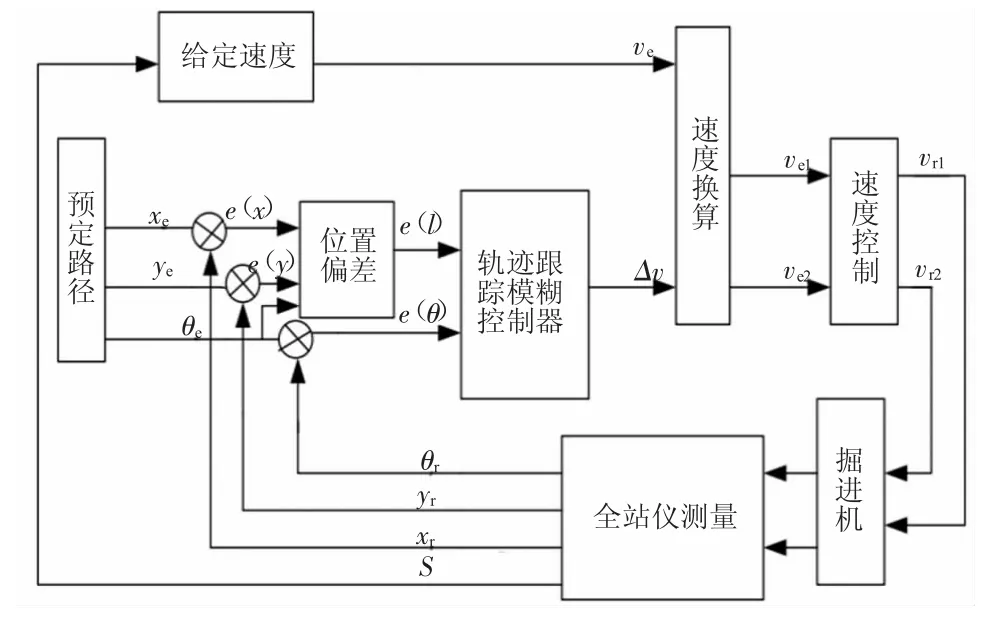
圖3 掘進機行走機構速度模糊控制器
如圖3所示,全站儀對掘進機實時坐標進行測量,并將所測量的數據與預定路徑的坐標值進行比對,基于通過比對得到的偏差值得出當前設備存在的橫縱坐標以及方位的偏差,并在軌跡跟蹤模糊控制器的作用下得出所需兩邊履帶(液壓馬達)的速度差值。結合當前掘進機行走機構兩邊履帶的速度差值與其所需偏差通過速度換算對兩邊履帶的速度進行控制,從而保證其行走中心線與巷道中心線一致。
2.2 掘進機行走機構自動跟蹤控制器設計
基于2.1中的控制思路,本文擬采用模糊控制算法實現掘進機行走機構兩邊液壓馬達(履帶)的速度控制。掘進機行走機構自動跟蹤模糊控制器的控制規則為:
1)當掘進機行走機構的中心線與巷道中心線的偏差很大,但是其行走方向是按照其預定路徑行走時,不對行走機構兩邊履帶的速度進行調整,確保兩邊履帶的速度偏差為零,保證行走機構直線行走[4]。
2)當掘進機行走機構的中心線與巷道中心線的偏差很大,且其行走方向偏離其預定路徑行走時,及時對行走機構兩邊履帶的速度進行調整,保證行走機構按照預定路徑方向行走,此時兩邊履帶的速度差較大。
3)當掘進機行走中心線與預定路徑的位置偏差和方位偏差之一很大時,及時對兩邊履帶的速度進行調整,且需要以中等或者較小速度差控制設備平穩進入預定軌道路徑。
根據掘進機行走機構電液比例閥、液壓馬達等參數,結合行走機構履帶速度模糊控制規則,并基于Simulink建立模糊控制器的仿真模型,如圖4所示。
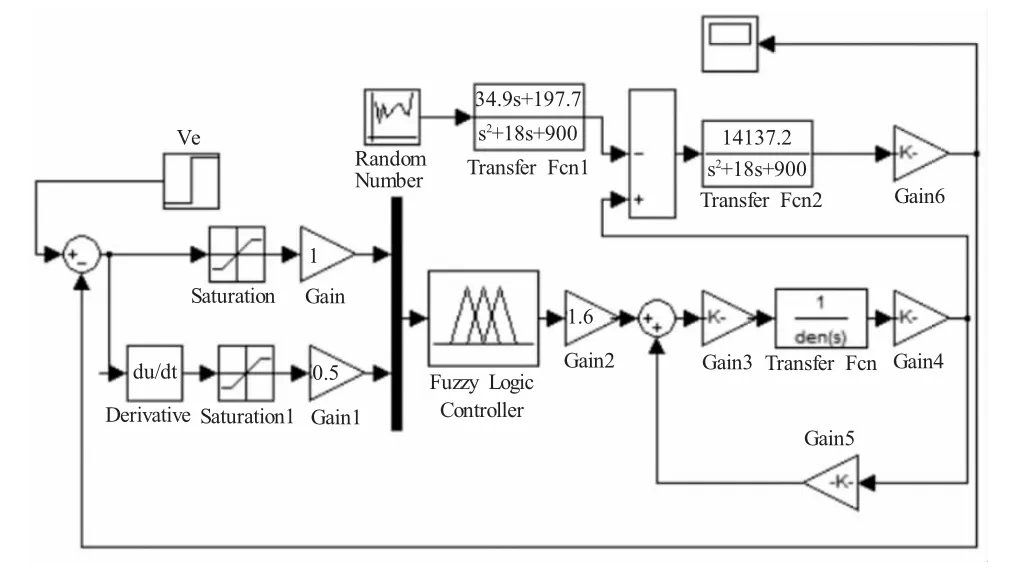
圖4 速度模糊控制器的Simulink仿真模型
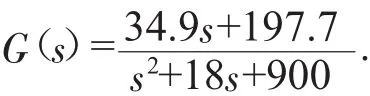
如圖4所示,根據模糊控制規則所得對掘進機行走機構液壓馬達控制的傳遞函數為:
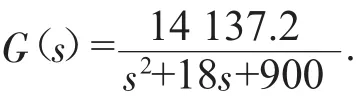
根據模糊控制規則所得對掘進機行走機構比例方向閥控制的傳遞函數為:
根據上述所設計的掘進機行走機構速度模糊控制器對其在不同工況下掘進機實際行走路徑與預定路徑的偏差(位置偏差和方位偏差)進行仿真分析,得出如表1所示的結果。
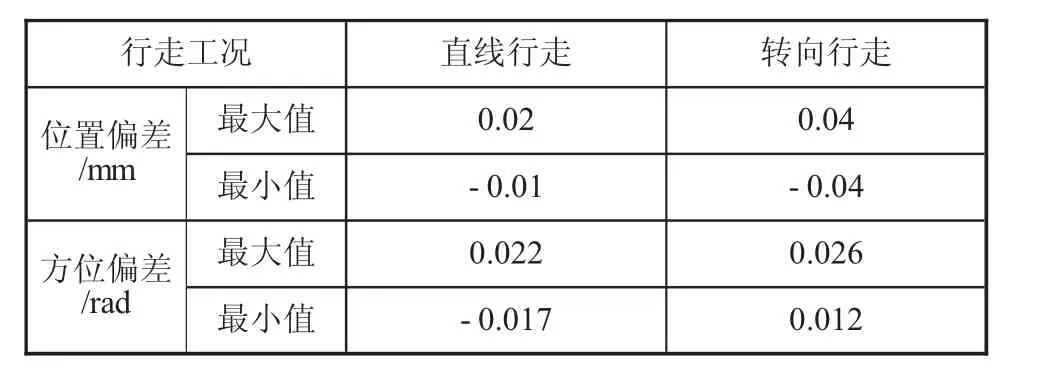
表1 不同工況下掘進機實際行走偏差
如表1所示,基于本文所設計的掘進機行走機構速度模糊控制器,在直線行走工況下的最大位置偏差量為0.04 m,最小位置偏差量為-0.01 m,滿足位置偏差絕對值不超過0.05 m的要求;在轉向行走工況下,最大位置偏差量為0.04 m,最小位置偏差量為-0.04 m,滿足位置偏差絕對值不超過0.05 m的要求[5]。
對于方位偏差而言,在直線行走工況下的最大方位偏差量為0.022 rad,最小方位偏差量為-0.017 rad,滿足位置偏差絕對值不超過0.05 rad的要求;在轉向行走工況下,最大方位偏差量為0.026 rad,最小方位偏差量為0.012 rad,滿足位置偏差絕對值不超過0.05 rad的要求。
綜上所述,基于速度模糊控制器能夠保證掘進機行走中心線與預定路徑中心線位置偏差不超過0.05 m和方位偏差不超過0.05 rad的要求。
3 結論
掘進機在實際掘進任務中其行走軌跡與預定軌跡的偏差量將直接決定巷道的成型質量和掘進成本。因此,通過對掘進機兩邊履帶(液壓馬達)速度差值的控制以實現設備按照預定路徑中心線推進。經仿真分析可得:在速度模糊控制器的作用下可保證掘進機行走機構在直線和轉彎工況下的位置偏差不超過0.04 m,方位偏差不超過0.03 rad,完全滿足位置偏差不超過0.05 m和方位偏差不超過0.05 rad的要求。