液壓支架初撐力自動調節控制系統的研究
2020-08-21 04:46:04李文武
機械管理開發 2020年8期
李文武
(山西鋪龍灣煤業有限公司, 山西 大同 037100)
引言
隨著綜采作業技術的不斷提升,現代煤礦綜采作業深度不斷增加,地質條件越加復雜,在綜采作業過程中發生頂板塌陷等事故的概率不斷增加,因此對支護安全性提出了更高的要求。液壓支架作為確保支護安全的核心,其支護過程中的效率和支護精確性直接關系到井下的綜采作業安全和經濟性[1]。針對目前液壓支架支護調節過程中多采用人工調整所帶來的調整周期長、初撐力調節精度差,安全性差的缺陷,本文提出了一種新的液壓支架初撐力自動調節控制系統。該系統通過對各個液壓支架支護狀態的監測來實現對其支護安全性的判斷,當初撐力出現變化時能夠自動控制液壓支架的支護初撐力,實現在支護過程中的穩定支護,不僅能夠實現整個初撐力調節過程中無人化控制,而且能夠確保在各個支護階段初撐力的精確性,對提高煤礦井下的支護安全和支護效率具有十分重要的意義。
1 液壓支架初撐力自動調控系統結構
根據液壓支架初撐力調節需求,本文所提出的液壓支架初撐力自動調節控制系統包括地面監控中心及井下的通信系統、液壓支架支護狀態調節系統、液壓支架支護狀態監測系統等。其地面監控中心主要用對液壓支架的工作狀態和初撐力情況進行實時監測,當出現異常時系統自動報警,同時對故障位置進行標識,根據各類數據的監測結果實現對故障的初步分析,滿足故障快速定位、快速排除的要求。液壓支架支護狀態調節系統和液壓支架支護狀態監測系統主要用于對液壓支架的支護初撐力和姿態進行監測,根據監測結果對其支護穩定性進行分析,然后控制液壓支架的支撐液壓缸,實現對其支護初撐力和支護姿態的調整,確保支護過程中的安全性和穩定性,該液壓支架初撐力自動調控系統的整體結構如圖1所示[2]。
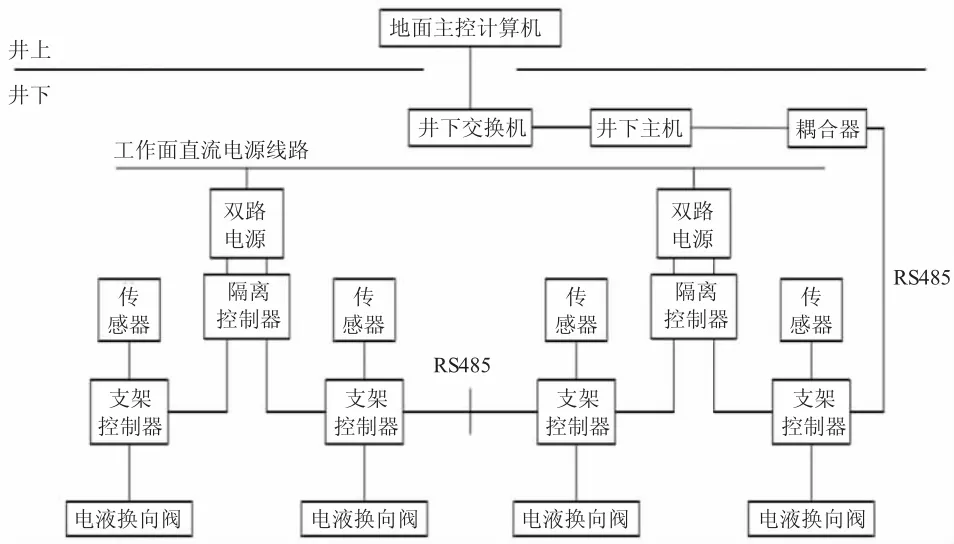
圖1 液壓支架自動調控系統結構示意圖
2 液壓支架支護狀態調節系統結構
液壓支架的支護狀態調節系統主要包括了液壓支架控制器、電液控制換向閥、各類傳感器設備及數據通信系統等,其整體結構如下頁圖2所示。該調節控制系統的核心為液壓支架控制器,該控制器通過對各監測傳感器監測結果的匯總分析,確定液壓支架姿態和初撐力的調節量,然后輸出調節控制信號給電液換向閥,控制電液換向閥工作,實現對液壓支架支護姿態和初撐力的調節。為了增加調節的靈活性,在該控制系統中還設置了人工現場調節模式,各個模式系統之間的數據通信采用了總線形式,滿足數據的高速、靈活的調節控制需求[3]。
3 液壓支架初撐力控制原理
對液壓支架初撐力的控制需要不斷進行調整,才能滿足精確控制的需求。傳統的開放式控制模式存在著控制周期長、響應速度慢、精度差的缺陷[4],本文提出了基于閉環回路調節的初撐力調節控制系統,該控制系統以執行油缸的工作壓力為調節控制信號,輸入初始設定的初撐力后壓力傳感器對執行油缸內的工作壓力進行監測,將監測結果輸入到支架控制器內,對實際壓力和理論要求壓力進行對比,根據偏差結果輸出電液控制換向閥調節控制信號,調整支架的初撐力,然后系統會繼續對實際量和理論量進行對比調整,直到滿足設定的初撐力控制要求。該調節控制系統采用了閉環調節控制的模式[5],能夠根據支護情況不斷對實際初撐力進行調整,從而能夠保證支護過程中初撐力的穩定性和一致性,確保支護安全。
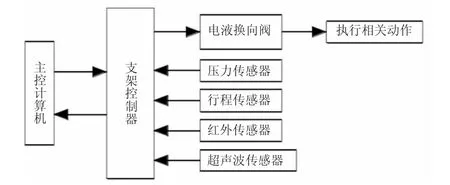
圖2 液壓支架支護狀態調節系統結構示意圖
為了對該液壓支架初撐力自動調控可靠性進行分析,建立了煤礦井下液壓支架初撐力自動調節控制系統,設定支架工作時執行油缸的工作壓力為7.5 MPa,則在監測過程中其調節控制曲線如圖3所示。
由圖3可知,在支護過程中執行油缸的工作壓力呈現波浪形的變化,在初撐力壓力調節控制系統的作用下其壓力變化幅度極小,最大變化量僅0.1 MPa,表明對執行油缸工作壓力的調節精度高,完全能夠滿足液壓支架在煤礦井下綜采面安全支護的需求。同時該系統實現了對初撐力的自動調節,降低了對調整人員的需求,提高了綜采作業的安全性,是實現液壓支架無人化支護作業的核心。
4 結論
1)液壓支架初撐力自動調節控制系統包括了地面監控中心及井下的通信系統、液壓支架支護狀態調節系統、液壓支架支護狀態監測系統等,能夠實現對液壓支架初撐力的持續監測和調節;
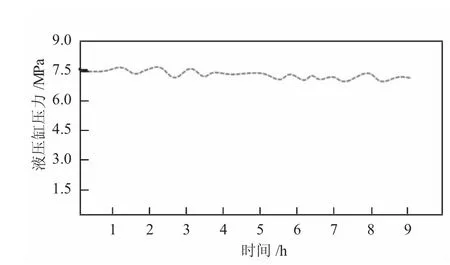
圖3 執行油缸壓力變化曲線
2)調節控制系統采用了閉環調節控制的模式,能夠根據支護情況不斷對實際初撐力進行調整,從而能夠保證支護過程中的初撐力的穩定性和一致性,確保支護安全。
3)在初撐力壓力調節控制系統的作用下其壓力變化幅度極小,最大變化量僅0.1 MPa,表明對執行油缸工作壓力的調節精度高,完全能夠滿足液壓支架在煤礦井下綜采面安全支護的需求,為實現無人化支護奠定了基礎。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
保健醫苑(2022年5期)2022-06-10 07:46:12
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國生物醫學工程學報(2019年4期)2019-07-16 08:04:16
模具制造(2019年3期)2019-06-06 02:10:54
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45