機器人技術在高速公路運營中的應用
2020-08-25 12:20:54王志錦
河南科技 2020年19期
王志錦

摘 要:本文闡述了高速公路智能巡邏機器人、高速公路隧道巡檢機器人、隔離帶清潔機器人在高速公路中運營中的應用,重點講述了這幾種機器人的系統組成、工作過程及使用注意事項等。
關鍵詞:機器人;智能巡邏;隧道巡檢;垃圾拾撿
中圖分類號:TP242;U495文獻標識碼:A文章編號:1003-5168(2020)19-0098-03
Abstract: This paper described the application of highway intelligent patrol robots, highway tunnel inspection robots, and isolation belt cleaning robots in highway operations. It focused on the system composition, working process and precautions of these kinds of robots.
Keywords: robot;intelligent patrol;tunnel inspection;garbage picking
先進的機器人技術、數據通信技術在高速公路運營中的應用,使得現在的高速公路運營管理越來越智能化。高速公路行業已經由密集型產業逐步轉為智能管理型產業,車輛、道路、使用者三者之間的聯系更加密切,形成一種安全、高效的運輸系統[1]。本文主要介紹了幾種典型機器人在高速公路運營中的應用,重點講述了這幾種機器人的系統組成、工作流程及使用注意事項等。
1 高速公路智能巡邏機器人
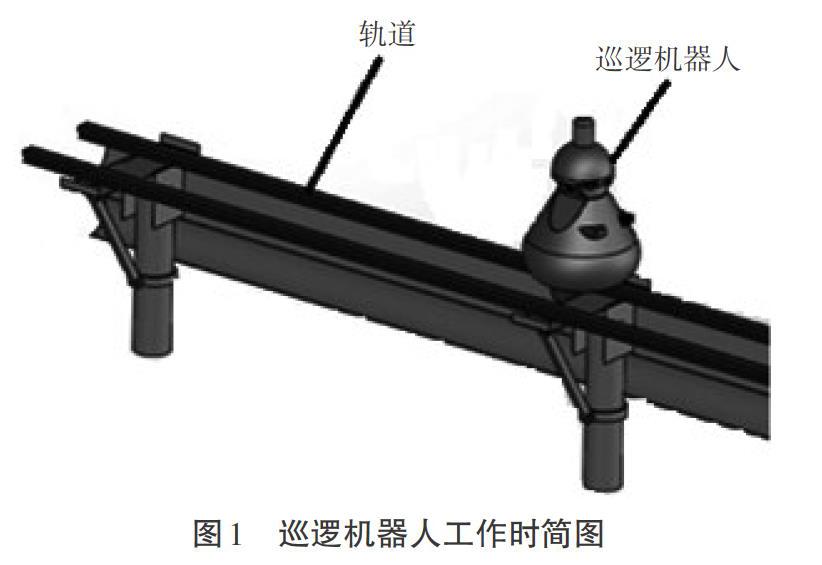
智能巡邏機器人以高速公路護欄為軌道,可沿公路護欄前行、后退、停止。圖1是機器人在高速公路護欄上工作時的簡圖。
1.1 主要功能及系統組成
1.1.1 主要功能。高速公路智能巡邏機器人主要用于監測高速公路運行工況,包括應急車道違規占用情況監測;事故預警;路面流量信息、擁堵狀況的實時監測;現場能見度、降雨降雪量、風速等氣象環境監測[2]。
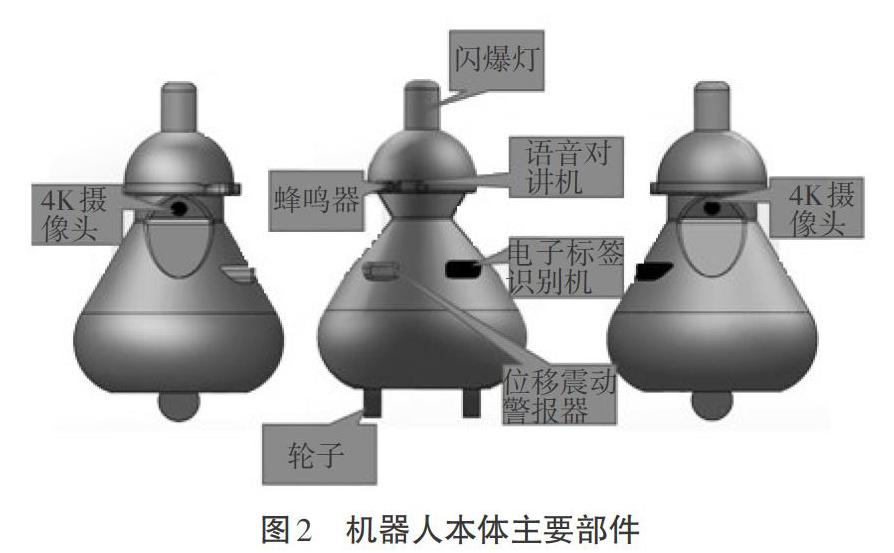
1.1.2 系統組成。智能巡邏機器人由機械系統、電氣控制系統、監測預警系統、遠程通信控制系統等組成。機器人本體主要部件如圖2所示。
對于機械系統,主要依據高速公路護欄的波浪型結構進行適應性設計,確保機器人能在護欄上高速平穩運行;同時,輪子上設置懸掛結構,以減輕機器人通過護欄連接處時產生的強烈震動,減少機器人震動沖擊對高精度設備的影響,延長使用壽命。
電氣控制系統控制機器人本體運行的路徑與能量供給,并規劃及控制機器人運行路徑。
監測預警系統能實時監測路況信息,通過先進的視頻雷達數據融合技術及時發現道路安全隱患,并做出準確判斷。
1.2 工作過程及其優點
1.2.1 工作過程。高速公路智能巡邏機器人在工作時,機器人本體上集成的高清攝像機、高精度傳感器等能實時監測路況信息,及時發現高速公路上的安全隱患。系統通過無線網絡將信號和數據傳輸給路段監控中心。路段監控中心管理人員可以通過登錄移動巡邏機器人應用APP,實時監測路況,同時操控指定巡邏機器人進行移動檢測。通過巡邏機器人應用APP可以實時了解移動巡邏設備的相關情況,包含無線網絡、后臺服務器是否連接正常,設備存儲電量是否充足等。管理人員通過手機也可對巡邏機器人應用APP進行實時監測和控制。
1.2.2 智能巡邏機器人優點。與人工巡查相比,智能巡邏機器人減少了人工、車輛及油料成本,可以避免人工巡查面臨的路面交通安全風險,也可大幅增加巡查頻次,提高巡查精細化程度。機器人的違章抓拍功能可有效減少各類交通違章行為。事故預警功能能更好地對路面交通事故作出快速反應,降低二次事故的風險。對講功能對突發情況下人員疏散等起到關鍵作用。路面病害識別、定位、分析功能對業主單位養護的及時性、科學性以及精細化尤為關鍵。自動充電功能確保機器全天候運行。
2 高速公路隧道巡檢機器人
高速公路隧道巡檢機器人有別于高速公路智能巡邏機器人,其是專門針對隧道的復雜情況設計的一款巡檢機器人。該機器人主要對隧道內設有的交通誘導、交通環檢、環境檢測、通風照明、火災報警等設備進行巡視監測。
2.1 隧道機器人活動區域
隧道巡檢機器人與智能巡邏機器人最大的不同在于活動區域的特殊性。隧道機器人的活動區域在隧道兩側的電纜蓋板上,能活動的區域較為狹長,機器人活動區域如圖3所示。
從圖3可以看出,隧道機器人的活動區域具有路面狹窄(寬度100 cm),行進道路較直,空隙、凸起較多等特點。
2.2 路徑檢測
為了讓隧道巡檢機器人在上述活動區域內穩定運行,隧道機器人系統自身有一套路徑檢測系統。該系統采用多個光電傳感器來進行路徑檢測,主要檢測道路邊界、道路空隙、道路臺階3個方面。
隧道巡檢機器人對道路邊界進行檢測時,采用2個光電傳感器,在隧道機器人機身兩側各安裝一個。隧道巡檢機器人在隧道中行使時,只開啟靠近墻壁的光電傳感器測量機器人到墻壁的距離,光電傳感器會隨時感知機器人一側到隧道壁的距離,根據光電傳感器的反饋距離,調整自身行進線路,使機器人始終與側壁的距離保持在一個安全范圍內。
隧道巡檢機器人對道路的空隙進行檢測時,主要采用安裝在機器人前端觸角結構上的光電傳感器。光電傳感器向地面發射光信號,探測光強度的變化,當遇到縫隙時,光強會發生變化,光電傳感器將光信號轉化為電信號,經過系統硬件和軟件計算機器人的行走路徑。
隧道巡檢機器人對道路的臺階進行檢測時,主要采用安裝在機器人前后端的光電傳感器。當遇到臺階時,光會發生反射效應,光信號的變化引起電信號的變化,通過系統自身的軟硬件,反饋給機器人本體,機器人調整行進路徑,繞開臺階。
