輸出型式對(duì)星輪減速器承載能力的影響
2020-08-26 07:06:52夏建芳高楊博
夏建芳,高楊博
(1.中南大學(xué)高性能復(fù)雜制造國(guó)家重點(diǎn)試驗(yàn)室,湖南長(zhǎng)沙,410083;2.中南大學(xué)機(jī)電工程學(xué)院,湖南長(zhǎng)沙,410083)
星輪傳動(dòng)輪系屬漸開線少齒差內(nèi)嚙合行星傳動(dòng)范疇,是一種具有全新結(jié)構(gòu)和設(shè)計(jì)原理的高性能傳動(dòng)方式。它釆用少齒差傳動(dòng)和有效圓設(shè)計(jì)原理,通過力分流均載機(jī)構(gòu)和新型內(nèi)嚙合星輪傳動(dòng)復(fù)合機(jī)構(gòu),連續(xù)滾動(dòng)地傳遞轉(zhuǎn)矩和運(yùn)動(dòng)。星輪減速器是一種因包含星輪傳動(dòng)輪系而得名且不同于行星減速器的新型減速器,具有結(jié)構(gòu)緊湊、傳動(dòng)比大、承載能力大、效率高等優(yōu)點(diǎn),尤其適用于低速重載工況,已廣泛用于冶金、礦山、電力等行業(yè)。星輪傳動(dòng)輪系的齒輪嚙合和受力情況、運(yùn)動(dòng)情況較復(fù)雜。目前,國(guó)內(nèi)外針對(duì)少齒差傳動(dòng)的應(yīng)力分析、接觸仿真等研究較多[1-12],對(duì)星輪傳動(dòng)輪系的研究較少。富永俊等[13-15]運(yùn)用剛體力學(xué)方法對(duì)星輪減速器星輪組件進(jìn)行了受力分析,對(duì)星輪軸承壽命進(jìn)行了預(yù)估;張俊等[16-17]建立了少齒差星輪型減速器彈性靜力學(xué)、彈性動(dòng)力學(xué)方程并進(jìn)行了相關(guān)分析;夏建芳等[18]基于多齒彈性接觸嚙合效應(yīng),建立了少齒差星輪傳動(dòng)多目標(biāo)優(yōu)化數(shù)學(xué)模型。由于人們對(duì)星輪減速器理論研究較少,在實(shí)際應(yīng)用中尤其在沖擊負(fù)載工況下出現(xiàn)齒輪磨損等問題,在一定程度上制約了產(chǎn)品的發(fā)展水平。星輪減速器根據(jù)輸出構(gòu)件的不同具有行星輪輸出和內(nèi)齒輪輸出共2種輸出型式,且星輪傳動(dòng)輪系大多用于低速級(jí)部分,以發(fā)揮其重載能力。星輪減速器的承載能力、傳動(dòng)比、結(jié)構(gòu)等特點(diǎn)取決于其星輪傳動(dòng)輪系,通常將星輪傳動(dòng)輪系稱為星輪減速器的核心單元[19],分析低速級(jí)星輪傳動(dòng)核心單元的承載能力等同于分析星輪減速器的承載能力。本文作者以HNML56B-280型星輪減速器的低速級(jí)星輪傳動(dòng)輪系為研究對(duì)象,釆用ABAQUS 有限元軟件對(duì)這2種不同輸出型式星輪傳動(dòng)輪系的輪齒應(yīng)力、嚙合特性進(jìn)行仿真分析,以便獲得相同載荷作用下不同輸出型式的載荷響應(yīng)影響特性。
1 星輪傳動(dòng)輪系結(jié)構(gòu)和工作原理
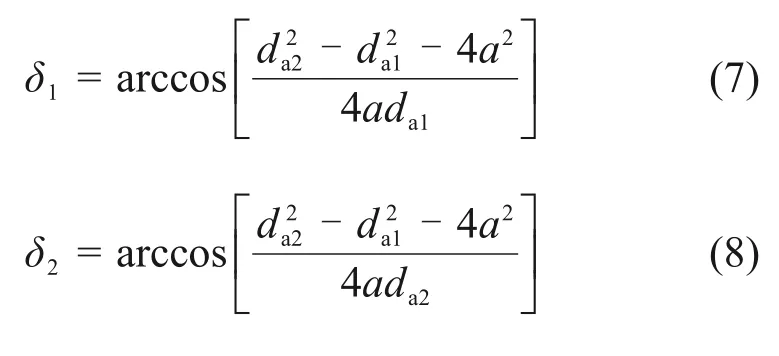
星輪傳動(dòng)輪系一般用于低速級(jí),可釆用內(nèi)齒輪輸出型星輪傳動(dòng),也可采用行星輪輸出型星輪傳動(dòng)。釆用Solidworks軟件建立低速級(jí)星輪傳動(dòng)輪系的三維裝配模型,圖1所示為這2種輸出型式星輪傳動(dòng)輪系的結(jié)構(gòu)分解圖。
不論哪種輸出型式,星輪傳動(dòng)輪系都含有1個(gè)偏心距為e的輸入曲軸、2個(gè)行星輪、4或6個(gè)偏心距均為e 的傳動(dòng)曲軸、1 個(gè)內(nèi)齒輪、左右支撐盤各1 個(gè)、4 或6 根聯(lián)結(jié)直軸。其裝配關(guān)系為:1)輸入曲軸上對(duì)稱180°安裝2個(gè)行星輪,傳動(dòng)曲軸與行星輪上周向均布的孔裝配;2)左、右支撐盤采用聯(lián)結(jié)直軸穿過行星輪沿周向均布的4或6個(gè)孔后裝配成一個(gè)整體星輪架,內(nèi)齒輪輸出型由整體星輪架驅(qū)動(dòng)內(nèi)齒輪,由內(nèi)齒輪與輸出軸固聯(lián),行星輪輸出型由整體星輪架與輸出軸直接固聯(lián),輸出軸與輸入曲軸的回轉(zhuǎn)軸線相同;3)2個(gè)行星輪上的4或6根傳動(dòng)曲軸兩端分別與左、右支撐盤上周向均布的孔對(duì)稱裝配,確保行星輪與內(nèi)齒圈對(duì)稱嚙合。
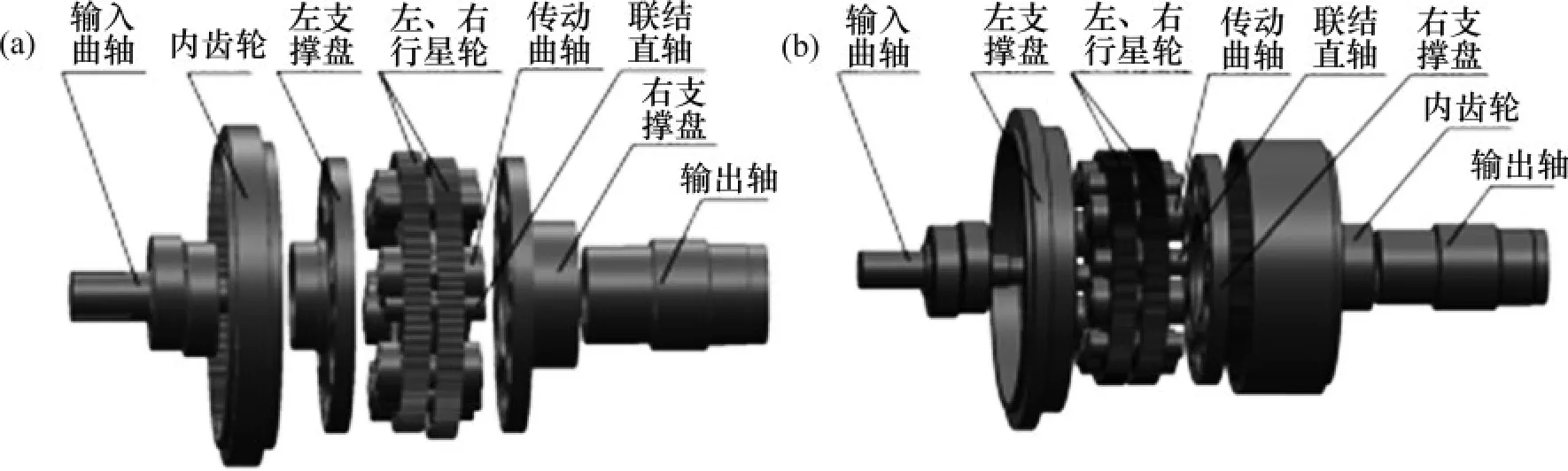
圖1 2種輸出型式星輪傳動(dòng)輪系的結(jié)構(gòu)分解圖Fig.1 Structural exploded views of two kinds of output type star wheel transmission gear trains
當(dāng)輸入曲軸旋轉(zhuǎn)時(shí),2個(gè)行星輪在輸入曲軸和4 或6 根作定軸轉(zhuǎn)動(dòng)的傳動(dòng)曲軸共同作用下與內(nèi)齒輪對(duì)稱180°相嚙合,產(chǎn)生與輸入曲軸轉(zhuǎn)速相同的公轉(zhuǎn)運(yùn)動(dòng),2 個(gè)行星輪每公轉(zhuǎn)1 圈,僅推動(dòng)內(nèi)齒輪轉(zhuǎn)過少數(shù)齒,從而按照不同輸出型式低速輸出。
1.1 內(nèi)齒輪輸出型
圖2所示為內(nèi)齒輪輸出星輪傳動(dòng)原理與運(yùn)動(dòng)簡(jiǎn)圖。內(nèi)齒輪輸出時(shí),右支撐盤與機(jī)架固聯(lián),等同于整體星輪架與機(jī)架固聯(lián)。由于輸入曲軸與行星輪上周向均布的傳動(dòng)曲軸的偏心距相等,偏心方向相同,行星輪上任意1個(gè)傳動(dòng)曲軸將與輸入曲軸沿偏心方向隱式組成平行四邊形機(jī)構(gòu),在輸入曲軸的回轉(zhuǎn)驅(qū)動(dòng)下,將使行星輪作繞半徑為e的圓的平面平移運(yùn)動(dòng),進(jìn)而帶動(dòng)與輸出軸固聯(lián)的內(nèi)齒輪繞中心軸線同向轉(zhuǎn)動(dòng),實(shí)現(xiàn)轉(zhuǎn)速與轉(zhuǎn)矩的輸出。
內(nèi)齒輪輸出型的內(nèi)齒輪壁厚相對(duì)較小且呈懸壁支撐結(jié)構(gòu),其加工工藝簡(jiǎn)單,制造成本較低。由于行星輪作平動(dòng),部分星輪傳動(dòng)輪系不能在星輪減速器箱體油池中回轉(zhuǎn),為改善齒輪及傳動(dòng)元件的潤(rùn)滑性能,齒輪需要采取噴油潤(rùn)滑。
1.2 行星輪輸出型
圖3所示為行星輪輸出星輪傳動(dòng)原理與運(yùn)動(dòng)簡(jiǎn)圖。如圖3(b)所示,行星輪輸出時(shí),內(nèi)齒輪與機(jī)架固聯(lián),其壁厚相對(duì)較大。當(dāng)輸入曲軸轉(zhuǎn)動(dòng)時(shí),一方面,與內(nèi)齒輪輸出型一樣,行星輪上任一個(gè)傳動(dòng)曲軸將與輸入曲軸沿偏心方向隱式組成平行四邊形機(jī)構(gòu),在輸入曲軸的回轉(zhuǎn)驅(qū)動(dòng)下,將使行星輪作繞半徑為e 的圓的平面平移運(yùn)動(dòng);另一方面,受固定內(nèi)齒輪嚙合的限制,行星輪將會(huì)產(chǎn)生反向自轉(zhuǎn),使得行星輪上均布的傳動(dòng)曲軸整體繞輸入中心線同樣反向自轉(zhuǎn),從而帶動(dòng)整體星輪架以及與之固聯(lián)的輸出軸作定軸轉(zhuǎn)動(dòng),實(shí)現(xiàn)轉(zhuǎn)速與轉(zhuǎn)矩的輸出。
針對(duì)行星輪輸出型的加工要求較高,制造成本增加。由于行星輪作公轉(zhuǎn)和自轉(zhuǎn),使星輪傳動(dòng)輪系在星輪減速器箱體油池中低速回轉(zhuǎn),改善了齒輪及傳動(dòng)元件的潤(rùn)滑性能,齒輪可以采用油池潤(rùn)滑。
2 星輪傳動(dòng)輪系的理論計(jì)算
2.1 傳動(dòng)比計(jì)算
將圖2(b)和圖3(b)所示的2 種輸出型式星輪傳動(dòng)進(jìn)一步等效簡(jiǎn)化為如圖4所示統(tǒng)一模型,應(yīng)用反轉(zhuǎn)法原理計(jì)算傳動(dòng)比。
設(shè)輸入曲軸轉(zhuǎn)速為ne,行星輪轉(zhuǎn)速為n1,行星輪齒數(shù)為z1,內(nèi)齒輪轉(zhuǎn)速為n2,內(nèi)齒輪齒數(shù)為z2,齒輪模數(shù)為m。給系統(tǒng)施加1個(gè)繞輸入主軸反向轉(zhuǎn)速,則輸入主軸不動(dòng),行星輪與內(nèi)齒輪組成1個(gè)定軸內(nèi)嚙合輪系,則有
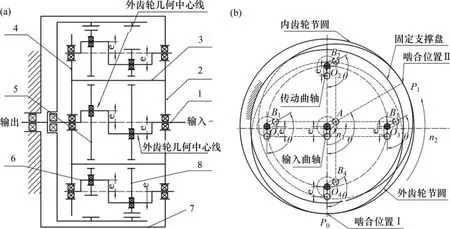
圖2 內(nèi)齒輪輸出星輪傳動(dòng)原理與運(yùn)動(dòng)簡(jiǎn)圖Fig.2 Transmission principle and motion diagram of internal gear output star wheel
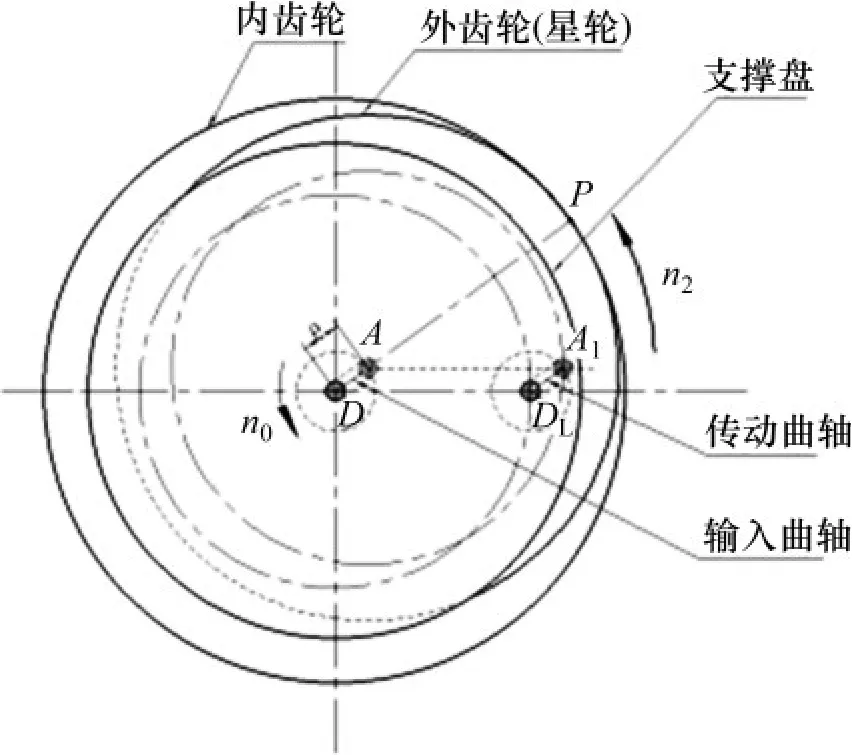
圖4 星輪傳動(dòng)傳動(dòng)比計(jì)算模型Fig.4 Calculation model of star wheel transmission ratio
2.1.1 內(nèi)齒輪輸出型傳動(dòng)比
內(nèi)齒輪輸出時(shí),右支撐盤與機(jī)架固聯(lián),行星輪輸入曲軸與傳動(dòng)曲軸組成1 個(gè)繞固定中心O-O1運(yùn)動(dòng)的平行四邊形機(jī)構(gòu),驅(qū)動(dòng)星輪作繞回轉(zhuǎn)中心O、半徑為e 的圓平動(dòng),平動(dòng)速度等于A 點(diǎn)速度。由于行星輪只作平動(dòng)而沒有轉(zhuǎn)動(dòng),故n1= 0 r/min。將其代入式(1)并進(jìn)行變換得
由式(2)可知:z2越大,z2- z1越小,則得到的傳動(dòng)比就越大;內(nèi)齒輪輸出時(shí),其轉(zhuǎn)向與輸入的轉(zhuǎn)向一致。
2.1.2 行星輪輸出型傳動(dòng)比
行星輪輸出時(shí),由于內(nèi)齒輪固定而沒有轉(zhuǎn)動(dòng),故n2= 0 r/min。對(duì)于行星輪,曲軸回轉(zhuǎn)中心O 固定,但傳動(dòng)曲軸繞固定圓周轉(zhuǎn)動(dòng),形成1個(gè)動(dòng)態(tài)平行四邊形,導(dǎo)致行星輪自轉(zhuǎn)和公轉(zhuǎn),其絕對(duì)轉(zhuǎn)速即為輸出軸轉(zhuǎn)速。將n2= 0 r/min 代入式(1)并進(jìn)行變換得
式中:內(nèi)齒輪齒數(shù)z2大于行星齒輪數(shù)z1,輸入方向與輸出方向正好相反。從式(3)可知,若需獲得較大傳動(dòng)比,則只需增大行星輪的齒數(shù)或者降低內(nèi)齒輪和行星輪的齒數(shù)差便可。
2.2 齒輪嚙合計(jì)算
因星輪傳動(dòng)輪系的內(nèi)嚙合齒輪副齒數(shù)差小,若采取標(biāo)準(zhǔn)齒高漸開線齒輪,則會(huì)產(chǎn)生各種干涉現(xiàn)象,包括切齒加工時(shí)的頂切與根切、輪齒過渡曲線干涉等,因此,進(jìn)行星輪傳動(dòng)輪系的齒輪嚙合計(jì)算時(shí)應(yīng)避免干涉問題,采用短齒和變位齒輪可有效地解決這一問題。
1) 當(dāng)行星輪、內(nèi)齒輪變位系數(shù)分別為x1和x2時(shí),應(yīng)滿足內(nèi)嚙合傳動(dòng)方程式:

2)對(duì)重合度要求:重合度εα>1,即
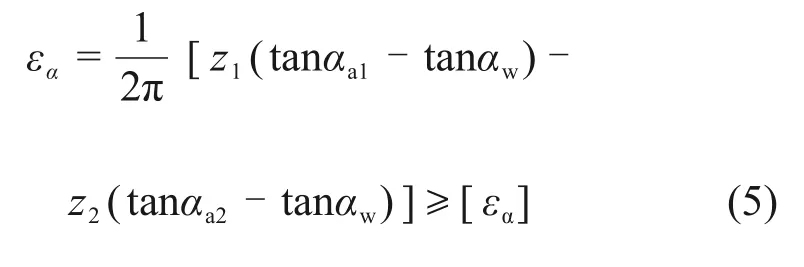
式中:αw為齒輪副嚙合角;αa1和αa2分別為行星輪、內(nèi)齒輪齒頂圓壓力角。
3)不產(chǎn)生齒廓重迭干涉,齒廓重迭干涉系數(shù)Gs>0,即
式中:
da1和da2分別為行星輪、內(nèi)齒輪的齒頂圓直徑。
3 2 種不同輸出型式星輪傳動(dòng)輪系的承載能力仿真分析
3.1 星輪傳動(dòng)輪系的結(jié)構(gòu)及參數(shù)
已知HNML56B-280型星輪減速器設(shè)計(jì)參數(shù)如下:輸入功率P=55 kW,輸入轉(zhuǎn)速nH=970 r/min,總傳動(dòng)比i=280,額定負(fù)載轉(zhuǎn)矩T=151.7 kN·m,應(yīng)用工況為沖擊載荷。其低速級(jí)傳動(dòng)系為四齒差星輪傳動(dòng)輪系,齒輪主要參數(shù)為:模數(shù)m=5,行星輪齒數(shù)z1=180,變位系數(shù)x1=0.909 3,內(nèi)齒輪齒數(shù)z2=184,變位系數(shù)x2=1.0,偏心距e=10.4 mm,齒頂高系數(shù)h*α= 0.7。在參數(shù)相同時(shí),低速級(jí)傳動(dòng)系可釆用內(nèi)齒輪輸出和行星輪輸出2種輸出型式的星輪傳動(dòng)輪系。圖5所示為2種輸出型式星輪傳動(dòng)輪系的裝配結(jié)構(gòu)簡(jiǎn)圖。
當(dāng)?shù)退偌?jí)傳動(dòng)系采用內(nèi)齒輪輸出型星輪傳動(dòng)輪系時(shí),由式(2)可得其傳動(dòng)比ie-2=46;當(dāng)?shù)退偌?jí)傳動(dòng)系采用行星輪輸出型星輪傳動(dòng)輪系時(shí),由式(3)可得其傳動(dòng)比ie-1=-45。根據(jù)式(5)和(6)計(jì)算得:εα=1.276 8>1,Gs=4.501 6>0,故星輪傳動(dòng)輪系的內(nèi)嚙合齒輪副滿足重合度和齒廓重迭干涉系數(shù)這2個(gè)方面的要求。
3.2 承載能力仿真分析有限元模型
為簡(jiǎn)化計(jì)算模型,保留單個(gè)行星輪和內(nèi)齒輪組成的內(nèi)嚙合齒輪副。
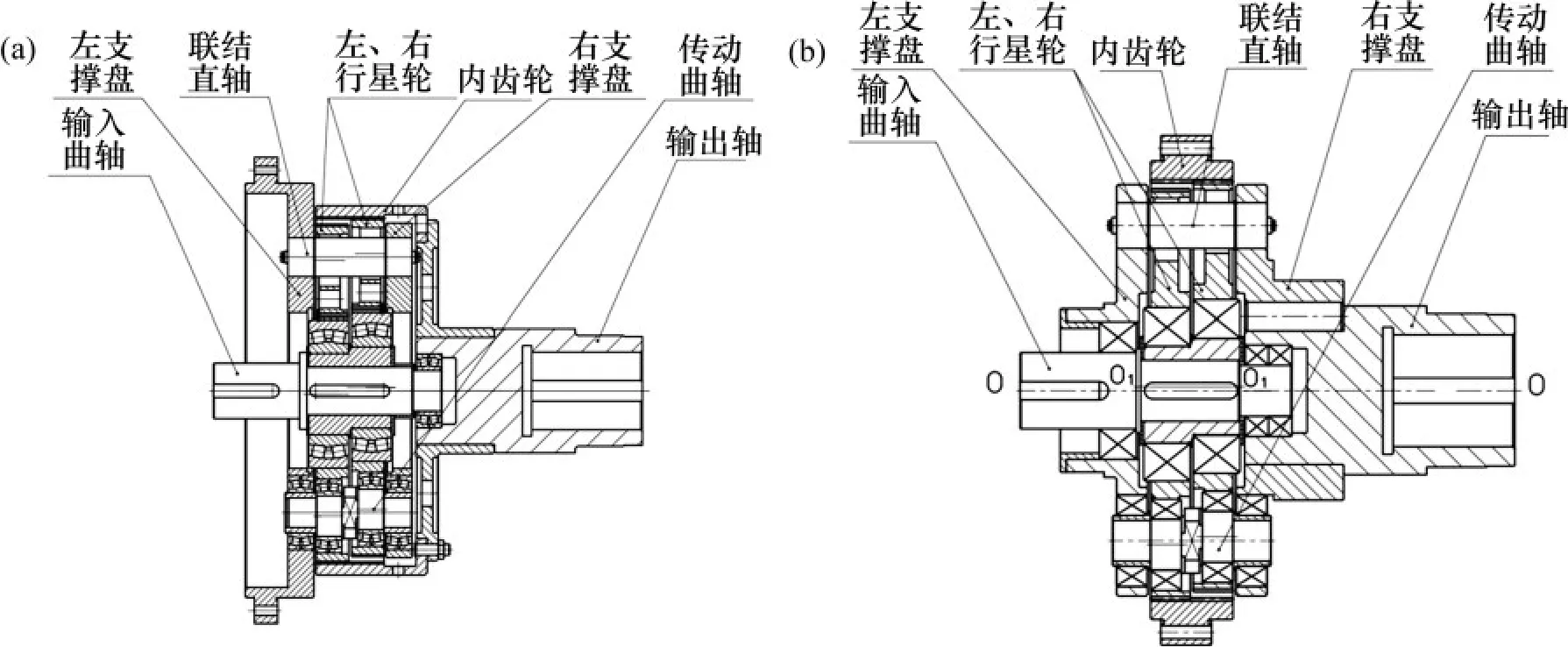
圖5 2種輸出型式星輪傳動(dòng)輪系的裝配結(jié)構(gòu)圖Fig.5 Assembly structure diagrams of two output types of star wheel transmission gear trains
根據(jù)星輪傳動(dòng)齒輪參數(shù),用GearTrax 齒輪專用設(shè)計(jì)軟件在SolidWorks 中建立星輪傳動(dòng)內(nèi)嚙合齒輪副的裝配模型,其全局坐標(biāo)系位于內(nèi)齒輪幾何中心,將其三維實(shí)體幾何裝配體以Parasolid 格式導(dǎo)入到ABAQUS 有限元軟件,采用結(jié)構(gòu)化網(wǎng)格技術(shù)以及網(wǎng)格疏密布局技術(shù)對(duì)部件模型進(jìn)行網(wǎng)格劃分。齒輪材料均為42 CrMo,在熱處理后其許用接觸應(yīng)力為745 MPa,許用彎曲應(yīng)力為558 MPa[20]。其彈性模量設(shè)置為206 GPa,泊松比為0.29,在每個(gè)部件中定義材料屬性。
采用四面體自由網(wǎng)格,內(nèi)齒輪模型共722 637個(gè)單元,行星輪模型共498 209個(gè)單元,模型網(wǎng)格總計(jì)1 220 846 個(gè)單元,得到2 種輸出型式星輪傳動(dòng)輪系的網(wǎng)格模型分別如圖6(a)和圖6(b)所示。同時(shí),細(xì)化輪齒接觸區(qū)域,輪齒接觸區(qū)域的有限元網(wǎng)格模型局部放大圖如圖6(c)和圖6(d)所示。
本文僅以內(nèi)齒輪輸出型為例對(duì)分析步定義過程進(jìn)行描述,對(duì)行星輪輸出型分析步定義過程參照內(nèi)齒輪輸出型分析布定義過程即可。
為了便于施加約束和邊界條件,在行星輪和內(nèi)齒輪的幾何中心分別定義參考點(diǎn)Pw和Pn,在輪系輸入軸心定義1個(gè)參考點(diǎn)P0。將Pw與行星輪輸入軸孔內(nèi)圓環(huán)面耦合,Pn與內(nèi)齒輪負(fù)載圓柱面耦合。為模擬輸入曲軸驅(qū)動(dòng)行星輪運(yùn)動(dòng),在行星輪中心軸線上定義1個(gè)參考點(diǎn)Pw1,用梁?jiǎn)卧B接Pw1和P0以模擬剛性輸入曲軸運(yùn)動(dòng),用鉸單元分別連接Pw1和Pw,模擬行星輪繞剛性輸入曲軸運(yùn)動(dòng)。
對(duì)內(nèi)齒輪輸出型傳動(dòng)輪系,行星輪作平面平移運(yùn)動(dòng)而帶動(dòng)內(nèi)齒輪繞中心軸線同向轉(zhuǎn)動(dòng)。總負(fù)載轉(zhuǎn)矩T=151.7 kN·m,在內(nèi)齒輪負(fù)載圓柱端面耦合點(diǎn)Pn上施加單個(gè)行星輪的反向額定輸出扭矩-75.85 kN·m。為了仿真模擬分析輸入曲軸轉(zhuǎn)動(dòng)過程的不同位置的輪齒嚙合應(yīng)力,在初始步基礎(chǔ)上創(chuàng)建4個(gè)通用靜力分析步,每個(gè)分析步時(shí)間設(shè)置為1 s。考慮到幾何非線性,即Nlgoem 選擇ON。各分析步對(duì)應(yīng)的載荷、邊界條件等設(shè)置情況如下。
inital:設(shè)置內(nèi)齒輪與行星輪的嚙合齒面為通用接觸對(duì),切向摩擦因數(shù)為0.1,法向接觸為硬接觸。
Step 1:施加輪齒接觸運(yùn)動(dòng)步。為使行星輪和內(nèi)齒輪充分接觸以避免沖擊,首先約束輸入軸心參考點(diǎn)P0的全部自由度,約束行星輪參考點(diǎn)Pw繞齒輪軸線的轉(zhuǎn)動(dòng)自由度;然后,在內(nèi)齒輪負(fù)載圓柱面參考點(diǎn)Pn施加1 個(gè)繞其軸線-0.000 1 rad 的轉(zhuǎn)角。
Step 2:施加輪齒接觸初始載荷步。為避免接觸問題不收斂,先施加小載荷。放開參考點(diǎn)Pn繞軸線的轉(zhuǎn)動(dòng)自由度,在Pn施加繞軸線-7.585×105N·mm的初始轉(zhuǎn)矩;
Step 3:施加滿負(fù)荷載荷步。將參考點(diǎn)Pn的轉(zhuǎn)矩增大到-7.585×105N·mm,自由度約束與Step 2的相同。
Step 4:滿負(fù)載運(yùn)轉(zhuǎn)指定角度步。給輸入軸心參考點(diǎn)P0施加弧度為1.57 rad(90°)的繞軸線轉(zhuǎn)角,約束與Step 3的相同。
3.3 2種輸出型式的仿真結(jié)果及分析
承載特性通過接觸齒對(duì)數(shù)、齒根彎曲應(yīng)力、齒面接觸應(yīng)力來(lái)評(píng)價(jià)。通過ABAQUS 軟件后處理求解,得出在額定轉(zhuǎn)矩T作用下,性能參數(shù)、齒輪參數(shù)以及網(wǎng)格劃分密度相同的2種輸出型式星輪傳動(dòng)輪系的仿真結(jié)果。
3.3.1 齒面最大接觸應(yīng)力
提取2種輸出型式下的接觸最大應(yīng)力云圖如圖7和圖8所示。
圖6 2種輸出型式星輪傳動(dòng)機(jī)構(gòu)的有限元分析網(wǎng)格模型Fig.6 Finite element analysis mesh models of two kinds of output type star wheel transmission mechanisms
3.3.2 齒根彎曲應(yīng)力
提取2種輸出型式下的彎曲應(yīng)力云圖如圖9和圖10所示。
2 種輸出型式下的最大接觸應(yīng)力、彎曲應(yīng)力見表1。
從圖7 和圖8 可以看出:2 種輸出型式星輪傳動(dòng)輪系的齒輪參與實(shí)際接觸的齒對(duì)數(shù)均達(dá)7個(gè),在額定載荷作用下均發(fā)生了多齒接觸,說(shuō)明星輪傳動(dòng)輪系具備多齒彈性嚙合效應(yīng),其內(nèi)嚙合齒輪副在載荷作用下,齒輪將受力產(chǎn)生微小彈性變形;當(dāng)齒輪彈性變形大于齒面法向間隙時(shí),輪齒將會(huì)接觸,使得本來(lái)沒接觸的齒面在載荷作用下接觸。星輪傳動(dòng)輪系的齒輪多齒接觸嚙合使得其承載能力和過載性能得到較大提升。
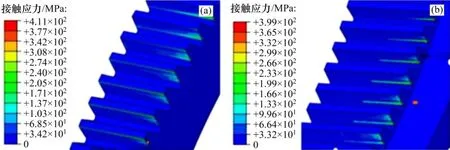
圖7 內(nèi)齒輪輸出型星輪傳動(dòng)齒輪的齒面接觸應(yīng)力云圖Fig.7 Tooth surface contact stress nephograms of internal gear output star wheel drive gear

圖8 行星輪輸出型接觸齒對(duì)齒面接觸應(yīng)力云圖Fig.8 Contact stress nephograms of planetary gear output type contact tooth to tooth surface
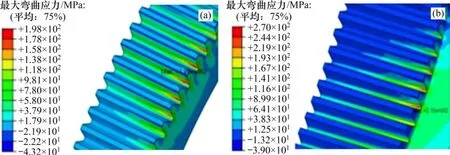
圖9 內(nèi)齒輪輸出型星輪傳動(dòng)齒輪的齒根彎曲應(yīng)力云圖Fig.9 Tooth root bending stress nephograms of internal gear output type star gear drive gear
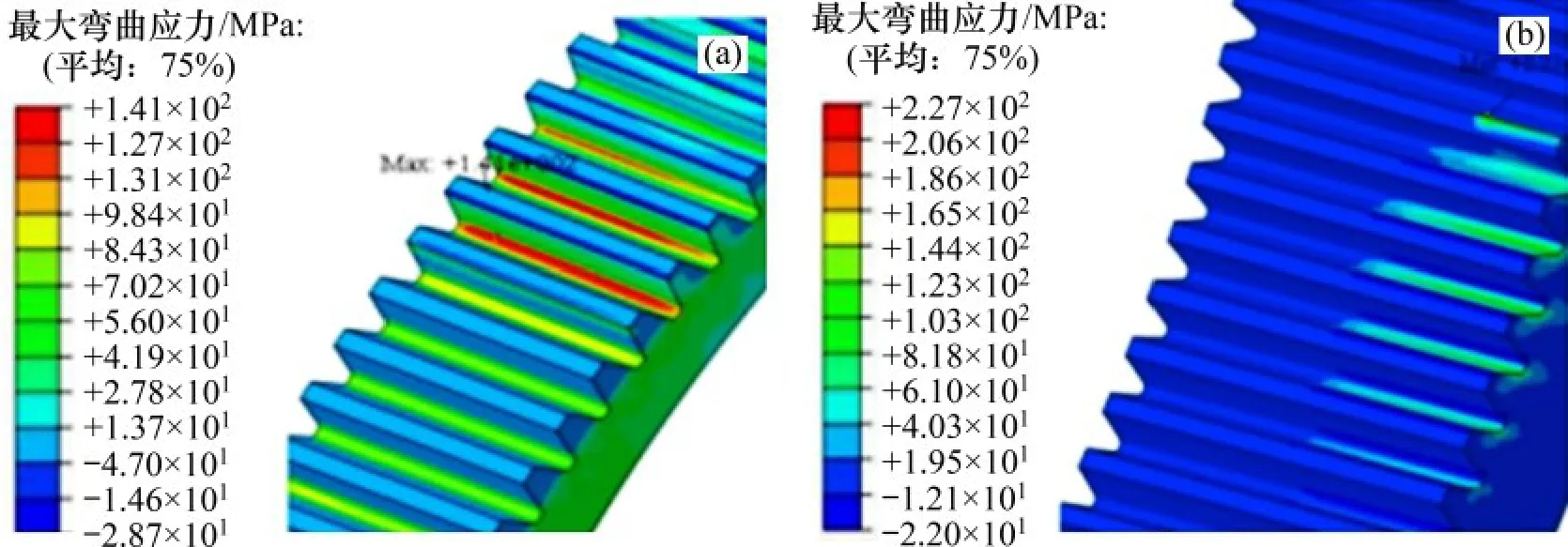
圖10 行星輪輸出型星輪傳動(dòng)齒輪的齒根彎曲應(yīng)力云圖Fig.10 Tooth root bending stress nephograms of planetary gear output type planetary gear drive gear

表1 2種輸出型式星輪傳動(dòng)承載能力Table 1 Carrying capacity of star wheel transmission of two output types
對(duì)比圖7和圖8可以看出:內(nèi)齒輪輸出型星輪傳動(dòng)中齒輪沿齒寬方向的齒面接觸應(yīng)力明顯不同,行星輪輸出型沿齒寬方向的齒面接觸應(yīng)力比較均勻。由圖9 和圖10 可以看到:齒輪的齒根彎曲應(yīng)力也存在相同的情況。這說(shuō)明行星輪輸出型的輪齒嚙合效果比內(nèi)齒輪輸出的輪齒嚙合效果好。由于內(nèi)齒輪輸出型星輪傳動(dòng)輪系的內(nèi)齒輪呈懸壁支撐,在載荷作用下產(chǎn)生的微小彈性變形量沿齒寬方向不均勻,接觸長(zhǎng)度減小,以致輪齒載荷產(chǎn)生了偏置,沿齒寬方向的輪齒應(yīng)力不均勻。
理論上,接觸齒對(duì)接觸應(yīng)力應(yīng)相等,從表1可知2種輸出型式星輪傳動(dòng)輪系的接觸齒對(duì)接觸應(yīng)力不完全相等,這是仿真誤差造成的,可取其平均值。分析表1可知:對(duì)于內(nèi)齒輪輸出型,齒面平均接觸應(yīng)力為405 MPa,為齒輪材料許用接觸應(yīng)力的54.4%,最大齒根彎曲應(yīng)力為270 MPa,為許用彎曲應(yīng)力的48.4%;對(duì)于行星輪輸出型,齒面平均接觸應(yīng)力為259 MPa,為齒輪材料許用接觸應(yīng)力的34.8%,最大齒根彎曲應(yīng)力為227 MPa,為許用彎曲應(yīng)力的40.7%。可見:在額定負(fù)載下,內(nèi)齒輪輸出型的齒面平均接觸應(yīng)力是行星輪輸出型的1.56倍。最大齒根彎曲應(yīng)力是行星輪輸出型的1.19倍,這說(shuō)明行星輪輸出型的齒輪承載能力比內(nèi)齒輪輸出型強(qiáng),其齒面接觸應(yīng)力和齒根彎曲應(yīng)力明顯較低,這是由于內(nèi)齒輪輸出型星輪傳動(dòng)輪系的內(nèi)齒輪壁厚較小且為懸臂結(jié)構(gòu),在嚙合齒對(duì)徑向分力作用下將產(chǎn)生偏載,導(dǎo)致接觸齒寬減小而引起最大局部接觸應(yīng)力大,彎曲應(yīng)力大。
4 結(jié)論
1)不同輸出型式下星輪運(yùn)動(dòng)特性不同,齒輪潤(rùn)滑方式也不同。內(nèi)齒輪輸出時(shí)星輪繞輸入軸線作半徑為偏心距e 的平面平動(dòng)而驅(qū)動(dòng)內(nèi)齒輪轉(zhuǎn)動(dòng),由于行星輪平動(dòng),齒輪需要采取噴油潤(rùn)滑;采用行星輪輸出時(shí),行星輪既繞輸入主軸線公轉(zhuǎn)又繞自身軸線自轉(zhuǎn),驅(qū)動(dòng)傳動(dòng)曲軸和整體星輪架輸出,由于行星輪作公轉(zhuǎn)和自轉(zhuǎn),齒輪可以采用油池潤(rùn)滑。這2種型式傳動(dòng)比雖然不等但相差甚小。
2) 不同輸出型式下齒輪承載能力不同。HNML56B-280型星輪減速器的低速級(jí)星輪傳動(dòng)輪系,行星輪輸出型的齒面接觸應(yīng)力和齒根彎曲應(yīng)力明顯較低,其齒輪承載能力比內(nèi)齒輪輸出型的強(qiáng)。故在選型時(shí),盡量采用行星輪輸出型,以提升產(chǎn)品過載能力。
3)這2種輸出型式星輪傳動(dòng)齒輪在額定載荷作用下均發(fā)生了多齒接觸,均具有多齒彈性嚙合效應(yīng)。HNML56B-280型星輪減速器的低速級(jí)星輪傳動(dòng)輪系參與實(shí)際接觸的齒對(duì)數(shù)相同均為7 個(gè)。同時(shí),內(nèi)齒輪輸出型星輪傳動(dòng)齒輪沿齒寬方向的輪齒載荷會(huì)產(chǎn)生偏置現(xiàn)象,行星輪輸出型齒輪沿齒寬方向的輪齒載荷比較均勻,其輪齒嚙合效果比內(nèi)齒輪輸出型的輪齒嚙合效果好。