基于輪廓重合度分析的道路標(biāo)記魯棒識(shí)別
2020-08-26 07:07:14陳家成肖曉明黃余唐琎耿耀君
關(guān)鍵詞:檢測(cè)
陳家成,肖曉明,黃余,唐琎,耿耀君
(1.西北農(nóng)林科技大學(xué)信息工程學(xué)院,陜西楊凌,712100;2.中南大學(xué)自動(dòng)化學(xué)院,湖南長(zhǎng)沙,410083)
隨著人工智能的興起,無(wú)人駕駛技術(shù)已經(jīng)成為企業(yè)和學(xué)者的研究熱點(diǎn)。無(wú)人駕駛汽車(chē)依靠計(jì)算機(jī)視覺(jué)提供必要的交通信息[1-2],識(shí)別公路編碼道路標(biāo)記是必要的組成部分[3]。道路識(shí)別對(duì)人類(lèi)駕駛員來(lái)說(shuō)是一項(xiàng)簡(jiǎn)單的任務(wù),但對(duì)計(jì)算機(jī)來(lái)說(shuō)并非易事。道路交通的復(fù)雜性、不同的街道照明、能見(jiàn)度和不同的天氣狀況常常會(huì)降低道路標(biāo)記的圖像質(zhì)量。非目標(biāo)干擾如積水、陰影、行人、車(chē)輛和路邊灌木叢等會(huì)使識(shí)別道路標(biāo)記變得復(fù)雜。如果這些非目標(biāo)干擾在預(yù)處理過(guò)程中不能有效去除,將會(huì)導(dǎo)致道路標(biāo)記識(shí)別出現(xiàn)誤報(bào),影響道路標(biāo)記識(shí)別算法的整體性能。此外,由于道路標(biāo)記種類(lèi)繁多,僅使用單一的特征描述符方法很難準(zhǔn)確區(qū)分,也很難區(qū)分陰性樣本(如積水、樹(shù)的陰影)[4-5],因此,在復(fù)雜的交通條件下,有必要結(jié)合多種特征對(duì)道路標(biāo)記進(jìn)行有效識(shí)別。目前,人們對(duì)路面車(chē)道標(biāo)記檢測(cè)的研究較多[6-7],但對(duì)道路標(biāo)記識(shí)別的研究較少。為了識(shí)別道路交通標(biāo)記,許多方法依賴(lài)于車(chē)道位置[8]的檢測(cè)結(jié)果。因此,車(chē)道檢測(cè)的準(zhǔn)確性會(huì)對(duì)其他道路標(biāo)記的識(shí)別產(chǎn)生很大影響。WU 等[9]指出了該方法的不足,提出了一種獨(dú)立的道路標(biāo)記檢測(cè)與識(shí)別算法。該方法提取多個(gè)ROIs作為最大穩(wěn)定極值區(qū)域(MSER)[10],然后,使用快速特征[11]和方向梯度直方圖(HOG)[12]特征作為描述符,為每個(gè)類(lèi)構(gòu)建模板。這種方法嚴(yán)重依賴(lài)于快速檢測(cè)的準(zhǔn)確性,并且數(shù)據(jù)量巨大的HOG 特征也需要大量的計(jì)算量。REBUT等[4]提出了一種識(shí)別4類(lèi)箭頭和線性標(biāo)記的方法。他們使用霍夫變換來(lái)檢測(cè)線性標(biāo)記,并使用1 個(gè)k 近鄰(KNN)[13]分類(lèi)器與傅里葉描述符來(lái)標(biāo)記其他道路標(biāo)記。WANG等[14]提出了一種基于先驗(yàn)知識(shí)和圖像匹配的道路標(biāo)記檢測(cè)與識(shí)別方法。GANG等[15]從重建圖像中得到4個(gè)改進(jìn)的Hu矩陣和2個(gè)仿射不變矩陣,然后使用SVM 分類(lèi)器進(jìn)行最終識(shí)別。這些方法操作簡(jiǎn)單,實(shí)時(shí)性好,在理想路況下取得了良好的效果。然而,在輕度和嚴(yán)重退化的道路條件下,該方法識(shí)別準(zhǔn)確率低,假陽(yáng)性率高。KHEYROLLAHI 等[16]提出了一種先進(jìn)行反向透視變換,然后利用自適應(yīng)閾值分割算法獲得二值圖像的算法。該算法利用連通域的方法提取道路標(biāo)線對(duì)應(yīng)的目標(biāo)區(qū)域,并在尺度和方向上進(jìn)行校正。最后,提取候選目標(biāo)的Hu 矩陣、直方圖、縱橫比等118 維特征,并與單隱層人工神經(jīng)網(wǎng)絡(luò)(ANN)分類(lèi)器相結(jié)合進(jìn)行特征識(shí)別。該方法對(duì)特定標(biāo)記的識(shí)別率較高,但對(duì)某些道路標(biāo)記(如分岔箭頭等)的識(shí)別率較低(75.5%)。此外,提取的特征維數(shù)高,采用人工神經(jīng)網(wǎng)絡(luò)進(jìn)行分類(lèi),計(jì)算量大。ZHANG 等[5]提出了一種利用霍夫變換檢測(cè)路面車(chē)道線并建立感興趣區(qū)域(ROI)的算法,然后進(jìn)行一維熵分割和邊緣檢測(cè),提取改進(jìn)后的Hu矩陣不變特征進(jìn)行識(shí)別。然而,該方法僅使用一種描述特征,因此,存在一定的局限性。此外,還有一些研究者使用深度學(xué)習(xí)來(lái)對(duì)道路標(biāo)記進(jìn)行分類(lèi)。AHMAD等[17]使用不同數(shù)量的卷積/池化操作和全連通層以及不同分辨率的道路標(biāo)記數(shù)據(jù)集來(lái)訓(xùn)練5 種不同的CNN 架構(gòu)。這2種方法只實(shí)現(xiàn)了對(duì)路標(biāo)的識(shí)別而沒(méi)有檢測(cè),不能直接應(yīng)用到實(shí)際情況中。更重要的是,這些深度神經(jīng)網(wǎng)絡(luò)需要大量的訓(xùn)練樣本和價(jià)格昂貴的圖形處理硬件來(lái)支持其龐大的計(jì)算負(fù)載,因此,很難將其應(yīng)用于嵌入式高級(jí)輔助駕駛系統(tǒng)和商業(yè)化。上述方法為道路標(biāo)記識(shí)別提供了廣闊的應(yīng)用前景。雖然個(gè)別算法分類(lèi)樣本的準(zhǔn)確率很高(>99%),但其綜合檢測(cè)和識(shí)別性能還沒(méi)有達(dá)到要求,這主要是實(shí)際道路環(huán)境中水、影、車(chē)、路邊草等復(fù)雜條件的干擾因素造成的。若這些非目標(biāo)干擾在預(yù)處理階段不能有效去除,則分類(lèi)器就很難正確區(qū)分負(fù)樣本,因此,在識(shí)別結(jié)果中存在許多誤報(bào),導(dǎo)致分類(lèi)器性能較低。在實(shí)際無(wú)人系統(tǒng)中,如果1個(gè)算法的結(jié)果含有大量誤報(bào),將嚴(yán)重影響高層決策算法的運(yùn)行,使無(wú)人系統(tǒng)失效。為了解決上述問(wèn)題,本文作者提出一種基于輪廓重合分析的非目標(biāo)干擾濾波算法,可有效濾除道路標(biāo)記識(shí)別預(yù)處理階段的大部分干擾,降低道路標(biāo)記識(shí)別錯(cuò)誤的風(fēng)險(xiǎn)。同時(shí),改進(jìn)輪廓特征分析方法,并將其與基于橢圓傅里葉描述子的SVM 相結(jié)合。這種提取和融合多種特征的方法可以更準(zhǔn)確地對(duì)道路標(biāo)記進(jìn)行分類(lèi)[8]。
1 算法原理
本文提出的整個(gè)道路標(biāo)線識(shí)別算法是基于IPM和非目標(biāo)濾波器的道路標(biāo)線魯棒識(shí)別算法。具體步驟如下:1)使用逆透視映射將原始圖像轉(zhuǎn)換為俯視圖像;2) 從頂視圖圖像中提取邊緣圖像和Canny 圖像;3) 對(duì)上述2 種圖像比較結(jié)果進(jìn)行分析,濾除干擾,得到過(guò)濾后的圖像;4)對(duì)過(guò)濾后的圖像進(jìn)行形狀處理和幾何濾波;5)對(duì)步驟4)所得結(jié)果使用2種方法進(jìn)行處理,其中,一種是通過(guò)輪廓特征分析計(jì)算道路標(biāo)線模板與圖像中目標(biāo)的相似度,另一種是計(jì)算圖像中目標(biāo)的橢圓傅里葉描述子并將其用于支持向量機(jī)的訓(xùn)練;6)將輪廓分析和支持向量機(jī)的2個(gè)結(jié)果進(jìn)行融合,得到最終的分類(lèi)結(jié)果。該算法的總體框架圖如圖1所示。
1.1 逆透視映射
由于車(chē)輛攝像機(jī)以斜角(稱(chēng)為原始圖像)捕獲道路圖像,因此,在所獲取的圖像中存在失真情況,在原始圖像上很難直接檢測(cè)和識(shí)別道路上的交通標(biāo)記。為此,首先使用IPM算法[19]將原始圖像轉(zhuǎn)換為俯視圖像,然后限制轉(zhuǎn)換后圖像的長(zhǎng)和寬,只留下有用的區(qū)域,如圖2所示。
1.2 結(jié)合Canny的閾值分割
為了獲得感興趣區(qū)域的邊緣,首先將彩色圖像轉(zhuǎn)換成灰度圖像,然后使用Canny邊緣檢測(cè)器提取圖像的邊緣。
由于獲取的道路圖像失真,在一定距離處道路圖像的清晰度略低于近點(diǎn)的清晰度,從而導(dǎo)致逆透視變換后頂視圖圖像的上半部分分辨率略低,因此,首先將俯視圖分成上、下2部分,然后使用鄰域塊參數(shù)為S1和S2的自適應(yīng)閾值分割算法(OSTU)[20]進(jìn)行分割,并將分割結(jié)果進(jìn)行合并。
由于上一個(gè)分割仍然包含許多孤立面片,以及由于光照效果不佳而沒(méi)有很好分割的區(qū)域,故將此結(jié)果與Canny邊緣檢測(cè)相結(jié)合并進(jìn)行第2個(gè)分割。首先,對(duì)第1個(gè)分割的每個(gè)連接域進(jìn)行輪廓搜索,并找到相應(yīng)的邊界矩形。其次,設(shè)置面積閾值Sth和外接矩形面積Srec,若Srec<Sth,則進(jìn)行第2次分割;否則,將該區(qū)域劃分為等距塊,然后進(jìn)行第2次分割。第2個(gè)分段計(jì)算式如下:
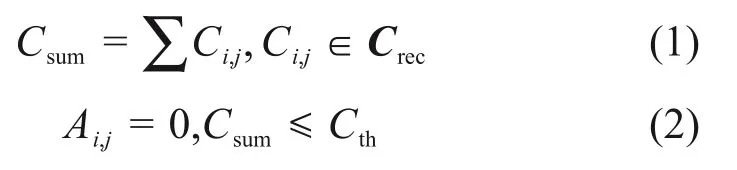
其中:Crec為對(duì)應(yīng)于矩形灰度圖像區(qū)域的矩陣;Cth為設(shè)置的Canny 邊緣像素閥值;Ci,j為該區(qū)域中的像素。使用式(1)計(jì)算矩形區(qū)域內(nèi)Canny 邊緣像素的總數(shù)Csum,若Csum≤Cth,則參考式(2)將連接區(qū)域內(nèi)的所有像素Ai,j設(shè)置為0;否則,使用鄰域塊參數(shù)為S3的自適應(yīng)閾值分割算法(OSTU)[20]對(duì)矩形區(qū)域中的灰度圖像區(qū)域Crec進(jìn)行二值化,以生成俯視圖像的普通二值化圖像Ibin。
1.3 色彩過(guò)濾
由于道路標(biāo)線以白色、黃色和紅色為主,利用顏色信息可以初步濾除道路上的路邊樹(shù)木、草地和色彩鮮艷的車(chē)輛等干擾。首先,將彩色頂視圖圖像從RGB空間轉(zhuǎn)換到HSV空間,得到其飽和度S、亮度V 和灰度圖像灰度G。然后,創(chuàng)建1 個(gè)新的灰度圖像Imask,其長(zhǎng)和寬與俯視圖的相同,定義如下:
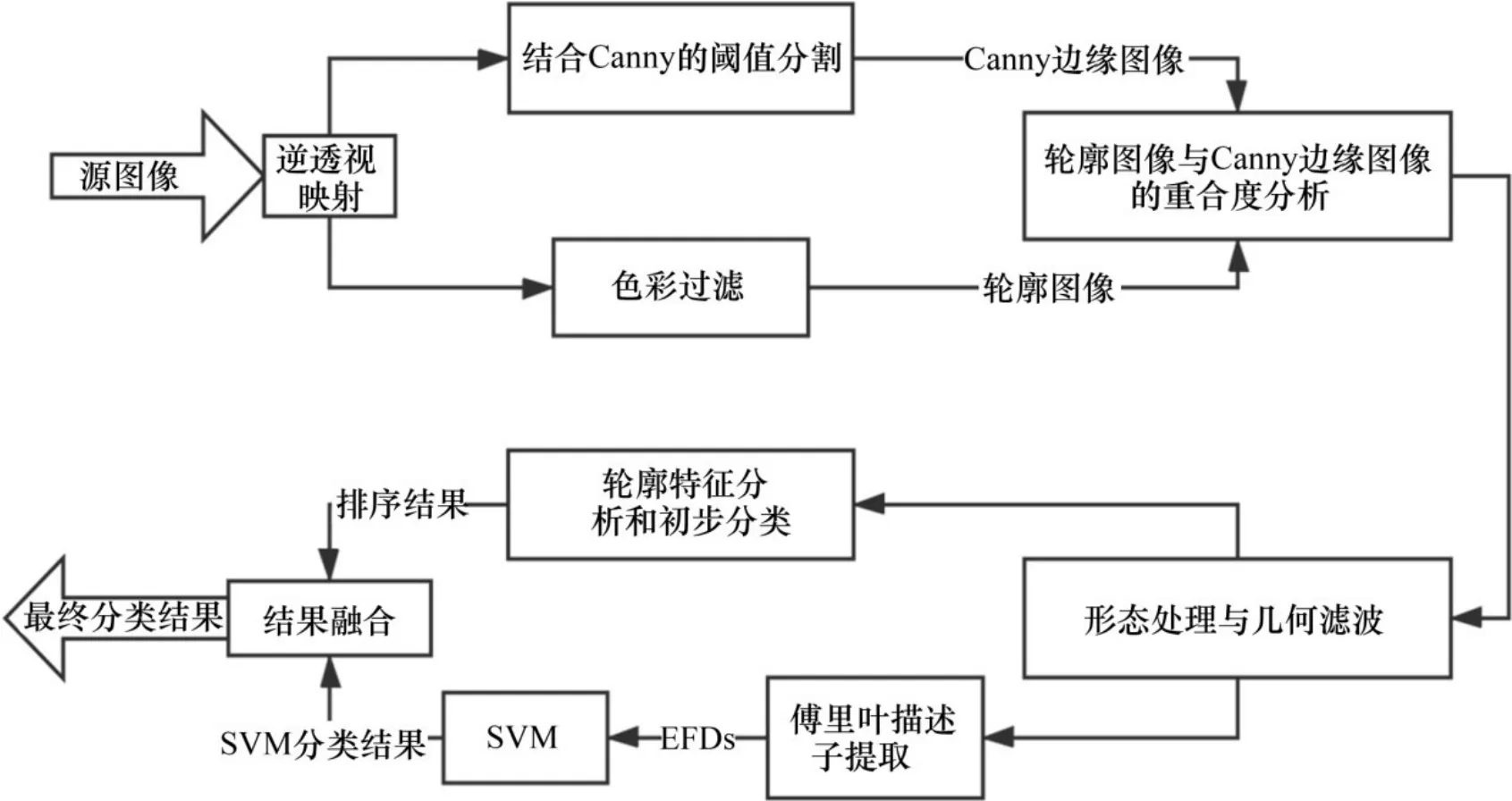
圖1 基于IPM和非目標(biāo)濾波器的道路標(biāo)線魯棒識(shí)別算法框圖Fig.1 Frame diagram of robust recognition algorithm of road markings with IPM and nontarget filter

圖2 逆透視映射算法得到的俯視圖示例圖Fig.2 An example of a top view image from inverse perspective mapping algorithm
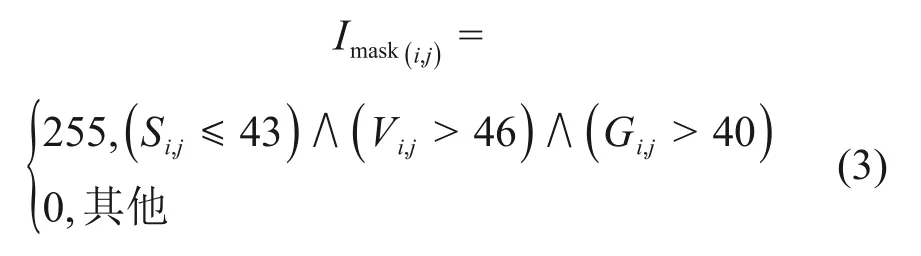
其中“∧”表示“并且”。式(3)用于基于顏色信息和灰度選擇滿(mǎn)足條件的遮罩區(qū)域,其中,閾值43,46和40是由實(shí)驗(yàn)確定的。
使用第1.2節(jié)中描述的方法獲得二值圖像Ibin中連接區(qū)域的輪廓,并確定每個(gè)輪廓的邊界矩形。每個(gè)矩陣使用

來(lái)計(jì)算掩模圖像Imask在相應(yīng)矩形區(qū)域中的非零點(diǎn)數(shù)Cyes。其中,Mrec為圖像Imask中的相應(yīng)矩陣;Mi,j為坐標(biāo)(i,j)的像素。若Cyes大于圖像Ibin中矩形區(qū)域的總非零點(diǎn)的一半,則認(rèn)為該區(qū)域包含過(guò)多的顏色像素,并且過(guò)濾掉圖像Ibin中的輪廓區(qū)域;否則,保留Ibin圖像中的輪廓區(qū)域。
1.4 輪廓與Canny邊緣的重合分析
現(xiàn)有的道路標(biāo)線識(shí)別方法大多對(duì)道路分割結(jié)果進(jìn)行簡(jiǎn)單幾何濾波,提取圖像區(qū)域中的目標(biāo)特征,然后進(jìn)行特征匹配和分類(lèi)[4-5]。當(dāng)感興趣的范圍小或道路環(huán)境簡(jiǎn)單時(shí),采用該方法可取得較好的效果。但是,當(dāng)感興趣的范圍較大(如車(chē)輛縱軸方向32 m,道路場(chǎng)景寬度18 m)或道路環(huán)境復(fù)雜時(shí),僅通過(guò)目標(biāo)大小、縱橫比、形狀特征等信息很難濾除非目標(biāo)干擾,導(dǎo)致誤報(bào)率高,穩(wěn)健性差。
經(jīng)過(guò)IPM 變換后,原始路面上的非平行車(chē)道線在俯視圖中變得平行,俯視圖中的道路標(biāo)線也變得更加規(guī)則。但是,在俯視圖中,原始圖像中具有一定高度的非目標(biāo)(如前車(chē)、行人、路邊草、圍欄等)會(huì)被拉伸變形,這將使頂視圖像中非目標(biāo)干擾的輪廓模糊,但路面上的交通標(biāo)記不會(huì)受到影響,因?yàn)樗鼈儧](méi)有高度。因此,Canny邊緣圖像與輪廓圖像在道路標(biāo)線和非目標(biāo)干擾的重合度上存在較大差異,即頂視圖中道路標(biāo)線的邊緣和輪廓重合度較高。相反,非目標(biāo)干擾符合度低,如圖3 所示。其中,圖3(a)中的非平行車(chē)道在圖3(b)中變?yōu)槠叫熊?chē)道。與圖3(a)相比,圖3(b),圖3(c)和圖3(d)中的目標(biāo)(道路標(biāo)記)變得更加規(guī)則,非目標(biāo)(車(chē)輛、草地和圍欄)在圖3(c)和圖3(d)之間表現(xiàn)出很大差異。圖3(c)和圖3(d)中的目標(biāo)區(qū)域很匹配,而非目標(biāo)區(qū)域則不匹配。
基于上述特點(diǎn),提出以下非目標(biāo)干擾濾波算法。
第1步,遍歷輪廓圖像中的每個(gè)輪廓,然后順時(shí)針掃描輪廓上的點(diǎn),以確定輪廓與邊緣圖像重疊的最長(zhǎng)長(zhǎng)度Lmax。計(jì)算Rmax,即Lmax與輪廓總長(zhǎng)度Lcontour之比:
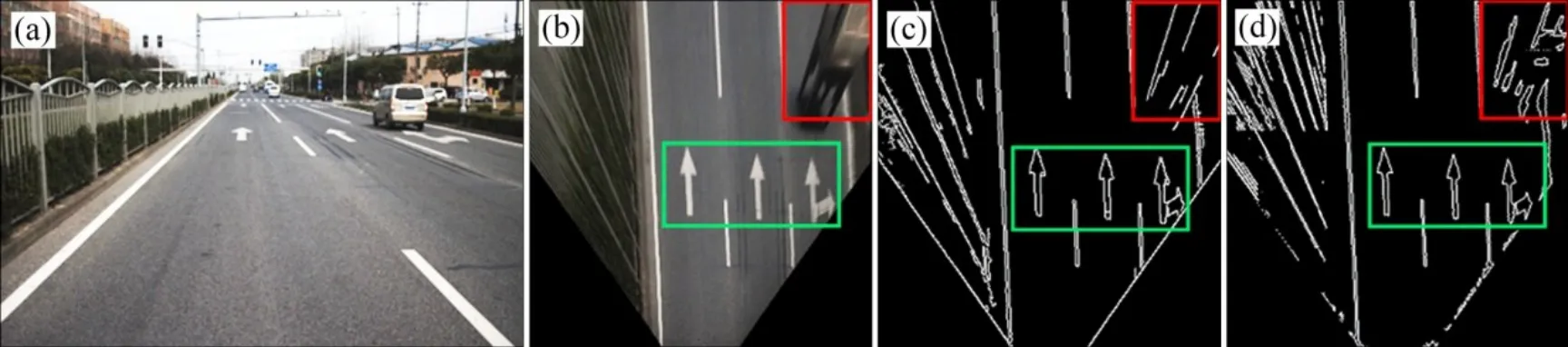
圖3 Canny邊緣與俯視圖像中輪廓的比較Fig.3 Comparison between Canny edge and the contour in the top view image
第2 步,經(jīng)實(shí)驗(yàn)設(shè)置高閾值RH和低閾值RL;若Rmax<RL,則將輪廓點(diǎn)視為路面區(qū)域的像素點(diǎn),并保留相應(yīng)的輪廓區(qū)域;若RH<Rmax,則將輪廓點(diǎn)視為非路面的立體干擾物的區(qū)域的像素點(diǎn),并過(guò)濾該輪廓點(diǎn);若RL<R<RH,則繼續(xù)執(zhí)行下一步。
第3步,確定包圍點(diǎn)鏈Lmax的最小矩陣Rin,并在Rin的基礎(chǔ)上向上、下、左、右4個(gè)方向擴(kuò)展5個(gè)像素,得到更大的矩陣Rout。若在展開(kāi)過(guò)程中遇到圖像的邊界,則停止沿該邊界方向展開(kāi)。分別確定Rin和(Rout-Rin)區(qū)域灰度圖像的平均灰度Vin和Vout。若Vdelta=|Vin-Vout|>25,則表示內(nèi)部和外部灰度之間的差異顯著,保留輪廓區(qū)域,否則丟棄。
使用收集到的20 000 多幅道路圖像進(jìn)行非目標(biāo)濾波實(shí)驗(yàn),發(fā)現(xiàn)非目標(biāo)過(guò)濾后的非目標(biāo)區(qū)域僅占原來(lái)二值化后的18.72%。這意味著在普通二值化基礎(chǔ)上,非目標(biāo)濾波可以進(jìn)一步去除81.28%的非目標(biāo)干擾。
不同道路場(chǎng)景的非目標(biāo)濾波結(jié)果如圖4 所示。其中,圖4中每個(gè)分圖從左到右依次為原始二值化結(jié)果、非目標(biāo)濾波結(jié)果和最終測(cè)試結(jié)果。需注意的是,每個(gè)分圖中的中心圖像都顯示了與最左圖像相比的過(guò)濾結(jié)果,最左圖像中的大多數(shù)非目標(biāo)都已被過(guò)濾掉。可見(jiàn)在不同的復(fù)雜環(huán)境下,非目標(biāo)濾波算法有效地去除了大部分干擾,濾波結(jié)果與二值化結(jié)果相比有了較大改善。
1.5 形態(tài)處理與幾何濾波
如1.4節(jié)所述,去除二值圖像中的非目標(biāo)干擾后,在檢測(cè)和識(shí)別道路標(biāo)記時(shí),處理時(shí)間和錯(cuò)誤檢測(cè)率降低。然而,檢測(cè)到的道路標(biāo)記有一些缺損,如破損或凹陷的標(biāo)線,因此,在特征提取之前,有必要對(duì)一些形狀進(jìn)行處理,即擴(kuò)填后再減縮,以減少標(biāo)記缺損,如圖5所示。
對(duì)邊界矩形進(jìn)行面積濾波和縱橫比濾波。遍歷所有剩余的輪廓,并計(jì)算外接矩形的面積Arec和縱橫比Rrec,保留滿(mǎn)足以下規(guī)則的輪廓區(qū)域:
通過(guò)對(duì)采集到的所有圖像進(jìn)行計(jì)數(shù),并記錄俯視圖中道路標(biāo)記的Arec最小值A(chǔ)min和最大值A(chǔ)max,以及俯視圖中道路標(biāo)記的Rrec最小值Rmin和最大值Rmax,通過(guò)實(shí)驗(yàn)確定面積和縱橫比的上下限。為了提高算法的適應(yīng)性,將得到的最小值減少20%,最大值增加20%。
1.6 輪廓特征分析與分類(lèi)
為了區(qū)分不同的道路標(biāo)線,輪廓描述子需要在不同的道路標(biāo)線類(lèi)型之間具有很高的相似性,并且在相同的道路標(biāo)線類(lèi)型之間具有很高的相似性,同時(shí)還需要具有平移、旋轉(zhuǎn)和縮放不變性。
在文獻(xiàn)[21]中,利用輪廓形狀描述子來(lái)表示人體輪廓的形狀特征,并與視頻序列特征相匹配,實(shí)現(xiàn)步態(tài)識(shí)別。該描述子根據(jù)人體關(guān)節(jié)的高度在人體輪廓上分布28 個(gè)標(biāo)記點(diǎn),每個(gè)標(biāo)記點(diǎn)到輪廓中心的距離構(gòu)成28 維特征向量。地標(biāo)點(diǎn)的分布假定不同人群的相對(duì)關(guān)節(jié)位置相同。
不同道路標(biāo)線的形狀不同,因此,提出一種新的路標(biāo)選擇方法,如圖6 所示(其中,Din為最內(nèi)側(cè)交點(diǎn)距離中心點(diǎn)的距離,Dout為最外側(cè)交點(diǎn)距離中心點(diǎn)的距離)。

圖4 不同道路場(chǎng)景的非目標(biāo)濾波結(jié)果Fig.4 Non-target filtering results of different road scenes
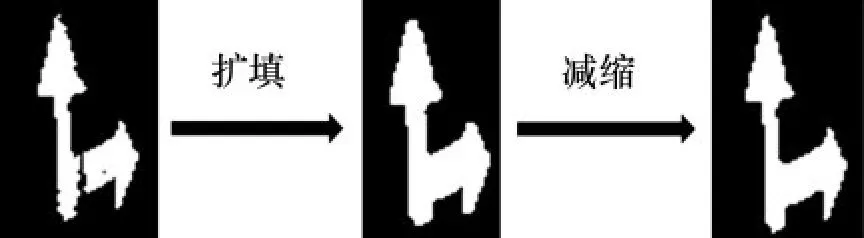
圖5 形態(tài)處理Fig.5 Morphology processing
該方法首先提取所有道路標(biāo)記模板的輪廓,將其高度歸一化為最高高度,并保持縱橫比不變。從輪廓的幾何中心(O)開(kāi)始,以規(guī)則間隔發(fā)出18條射線(如圖6(a)所示)。記錄每條射線與輪廓之間的內(nèi)外交點(diǎn)(見(jiàn)圖6(b))。若每條射線有2 個(gè)以上的交點(diǎn),則只保留最內(nèi)側(cè)點(diǎn)和最外側(cè)交點(diǎn)。若射線沒(méi)有交點(diǎn),則該射線對(duì)應(yīng)的內(nèi)、外距離均設(shè)置為0。若幾何中心于輪廓內(nèi),則該射線對(duì)應(yīng)的內(nèi)部相交距離設(shè)置為0,交叉點(diǎn)用作輪廓標(biāo)記點(diǎn)。這里的距離是歐幾里德距離。因此,使用k×d維矩陣來(lái)表征道路標(biāo)記的每個(gè)輪廓,其中,k=18表示每個(gè)輪廓使用的射線數(shù)為18,d=2表示交點(diǎn)的個(gè)數(shù)為2。要使矩陣對(duì)平移、旋轉(zhuǎn)和縮放保持不變,需要執(zhí)行如下步驟。
1)將模板輪廓和實(shí)際道路標(biāo)記輪廓(分別為MT和MR)的形狀矩陣中心化:

其中:中心矩陣C = Ik-(1/k)1k1Tk;Ik為1 個(gè)k×k的單位矩陣;1k是值均為1的k維向量。
2)將中心真實(shí)道路標(biāo)記矩陣MRc進(jìn)行變換、旋轉(zhuǎn)和縮放,得到中間矩陣MY:

其中:β ∈?+,為比例因子;Γ 為d×d 維正交旋轉(zhuǎn)矩陣;γ 為1 個(gè)(d × 1)轉(zhuǎn)置的d 維向量;相似參數(shù)因子β,Γ和γ通過(guò)最小化矩陣MTc和MY之間的歐氏距離得到,即最小化

來(lái)得到MY。
3)使用以下公式計(jì)算模板輪廓與實(shí)際道路標(biāo)線輪廓之間的相似度SCSA:
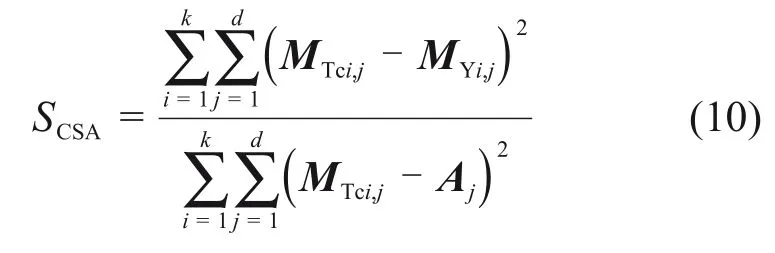
其中:A 為模板矩陣MTc的每個(gè)維度的平均值的行向量。SCSA的范圍為[0,1],表示2 個(gè)輪廓之間的相似性,其值越小,則表示2 個(gè)輪廓之間的相似度越小。
在實(shí)驗(yàn)中,使用式(10)比較提取的輪廓與每種模板的輪廓的相似度,然后,根據(jù)相似度等級(jí)對(duì)它們進(jìn)行排序,從而實(shí)現(xiàn)道路標(biāo)線的分類(lèi)。
1.7 橢圓傅里葉描述子的特征提取與分類(lèi)
橢圓傅里葉描述子[22]比傳統(tǒng)的傅里葉描述子更適合描述復(fù)雜的單閉合輪廓,具有更高的描述精度和更少的系數(shù),它對(duì)平移、旋轉(zhuǎn)和縮放具有不變性,對(duì)輪廓起點(diǎn)不敏感。
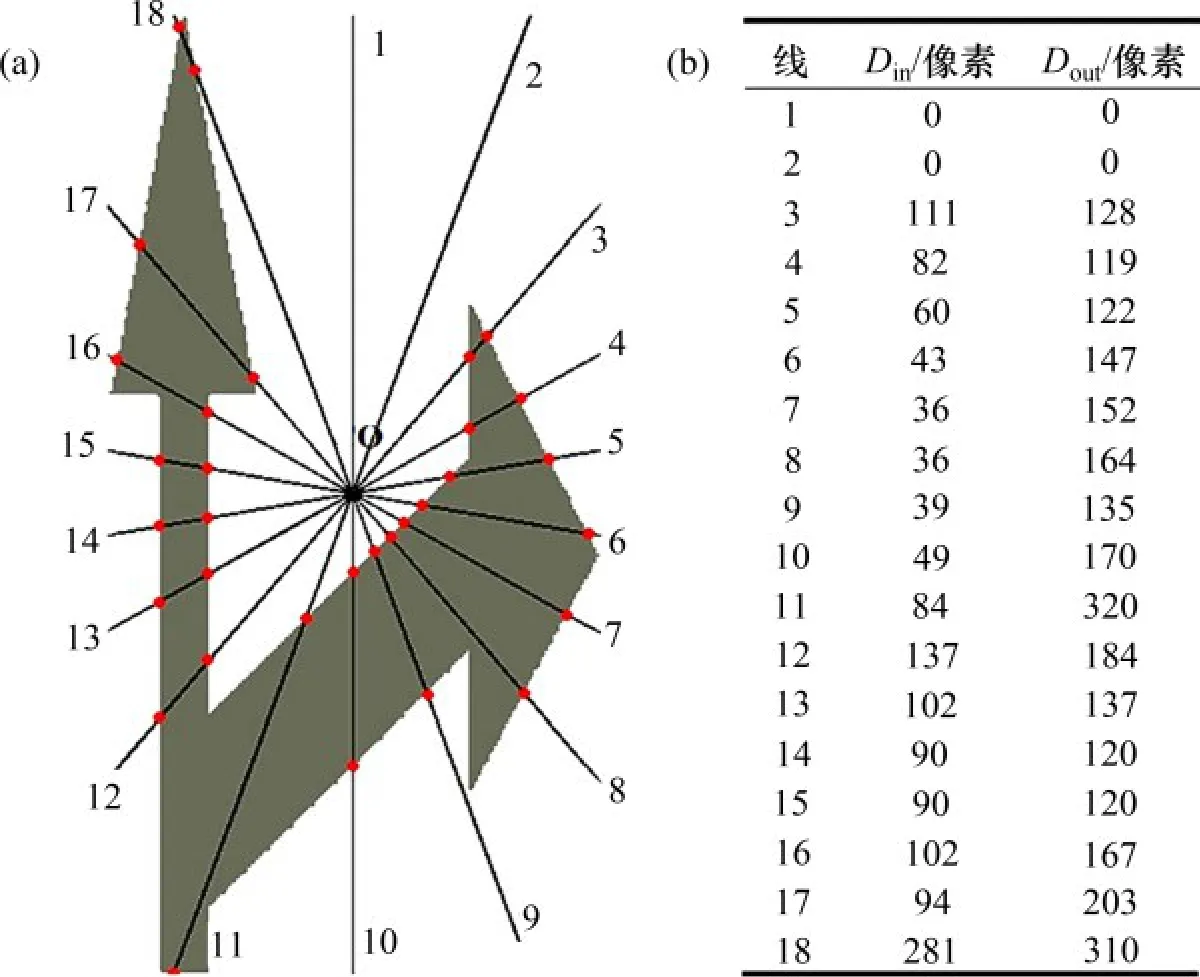
圖6 標(biāo)記點(diǎn)采集方法示例圖Fig.6 An example diagram of the marking point acquisition
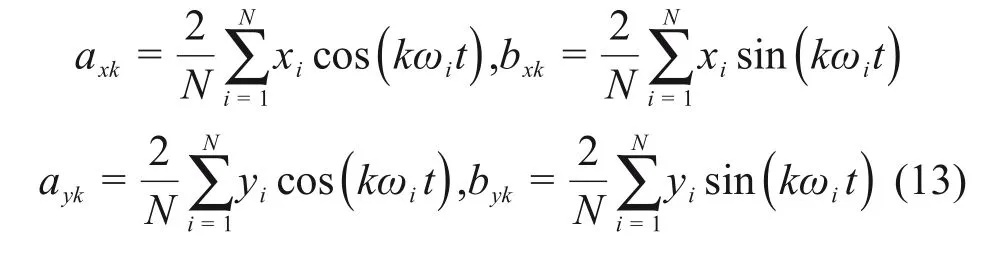
本文隨機(jī)選取輪廓上的1 個(gè)點(diǎn)(x0,y0)作為起點(diǎn),沿輪廓逆時(shí)針?lè)较虮闅v,直至到達(dá)原點(diǎn)。在此期間遇到的點(diǎn)集記錄為(x1,y1),(x2,y2),…,(xN-1,yN-1)。把這些點(diǎn)集看作一個(gè)復(fù)雜的序列s(t),即

其中:t=0,1,2,…,N-1。Fourier 級(jí)數(shù)在輪廓的(x,y)方向展開(kāi)如下:

其中:
使用以下方法得到對(duì)平移、旋轉(zhuǎn)和縮放不變的橢圓傅里葉描述子:
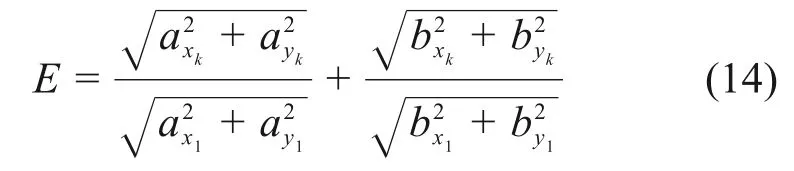
式中:E 表示提取到的橢圓傅里葉描述子(EFD)。由于低頻EFD 能表征輪廓的宏觀特征,而高頻EFD 能表征輪廓易受噪聲影響的細(xì)節(jié),因此,僅選擇前36 個(gè)系數(shù)作為輪廓的橢圓傅里葉描述子。這些數(shù)據(jù)被傳遞給經(jīng)過(guò)訓(xùn)練的SVM[23]進(jìn)行分類(lèi)。
1.8 結(jié)果融合
由于道路交通環(huán)境的復(fù)雜性,不能保證提取的目標(biāo)都是道路標(biāo)線,并且可能存在少量的非目標(biāo)干擾。因此,為了提高算法的魯棒性,使用以下簡(jiǎn)單的規(guī)則來(lái)融合這2個(gè)分類(lèi)結(jié)果:

其中:RSVM為支持向量機(jī)分類(lèi)的結(jié)果;RCPA1和RCPA2分別為輪廓特征分析的前2 個(gè)分類(lèi)結(jié)果;Rfinal為最終結(jié)果。融合方法首先對(duì)輪廓特征分析的結(jié)果進(jìn)行排序,然后確定支持向量機(jī)分類(lèi)的結(jié)果是否在輪廓特征分析的前2個(gè)結(jié)果內(nèi)。若是,則確認(rèn)目標(biāo)為道路標(biāo)線,并將SVM 分類(lèi)結(jié)果作為最終結(jié)果;否則,將提取的目標(biāo)視為干擾。該融合方法提高了識(shí)別結(jié)果的可靠性,降低了誤報(bào)率。
1.9 目標(biāo)定位及誤差補(bǔ)償
為了滿(mǎn)足無(wú)人駕駛汽車(chē)的要求,不僅需要確認(rèn)正確的道路標(biāo)記類(lèi)型,而且需要知道它們的確切位置。根據(jù)第3節(jié)中的逆透視算法,將實(shí)際的感興趣的區(qū)域設(shè)置為車(chē)輛前方0~32 m,從左到右的距離為18 m;在俯視圖中,將水平和垂直方向上每個(gè)像素表示的實(shí)際物理距離分別設(shè)置為σx=8 cm和σy=5 cm。因此,逆透視變換后的俯視圖長(zhǎng)×寬為w×h=360 像素×400 像素。然后,對(duì)于俯視圖中的每個(gè)像素(xm,ym),車(chē)輛坐標(biāo)系中相應(yīng)的實(shí)際位置(Xreal,Yreal)由以下公式給出:
其中:d和l為補(bǔ)償值。獲取(Xreal,Yreal)后,從頂視圖圖像到原始圖像的映射由IPM[19]給出。類(lèi)似地,當(dāng)俯視圖中道路標(biāo)記的坐標(biāo)已知時(shí),由式(16)給出車(chē)輛坐標(biāo)系中的實(shí)際位置。
為了分析定位誤差,將實(shí)驗(yàn)車(chē)輛開(kāi)到道路標(biāo)線的后部,使車(chē)輛前部垂直于標(biāo)線的下邊緣。然后,讓算法自動(dòng)識(shí)別道路標(biāo)線,并在計(jì)算機(jī)顯示器上實(shí)時(shí)輸出標(biāo)線的位置坐標(biāo)(Xreal,Yreal)。然后選擇標(biāo)記識(shí)別框的左下角作為參考點(diǎn),并使用標(biāo)尺測(cè)量其實(shí)際坐標(biāo)。每次記錄后,倒車(chē)1~2 m,直到32 m左右。
由于攝像機(jī)標(biāo)定參數(shù)的誤差,在識(shí)別距離內(nèi)的道路標(biāo)線時(shí)可能存在較大的定位誤差,因此,使用最小二乘法對(duì)算法的測(cè)量結(jié)果和誤差進(jìn)行多項(xiàng)式擬合。最后,算法的位置輸出是原始測(cè)量值加上補(bǔ)償值d和l的結(jié)果。
2 結(jié)果與討論
使用車(chē)載相機(jī)拍攝了我國(guó)長(zhǎng)沙、上海和蘇州的城市交通,總共獲得29 850 張圖像,其中包括1 032張帶有道路標(biāo)記的圖像。對(duì)原始視頻(30幀/s)進(jìn)行截圖采樣,生成圖像數(shù)據(jù)集。圖像采集是在晴天、多云和小雨天氣以及正常、磨損和其他道路條件下進(jìn)行的。
實(shí)驗(yàn)中使用8 種常見(jiàn)的道路標(biāo)記,如圖7所示。
圖8 所示為所提出的算法所涉及的各種過(guò)程。該算法的輸出包含標(biāo)記的類(lèi)型及其在車(chē)輛坐標(biāo)系中的位置,其中,圖8(f)所示為過(guò)濾掉圖8(b)中非目標(biāo)區(qū)域的結(jié)果,可以發(fā)現(xiàn)干擾基本上被過(guò)濾了。
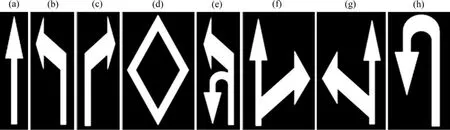
圖7 8種常見(jiàn)的道路標(biāo)記Fig.7 8 types of common road markings
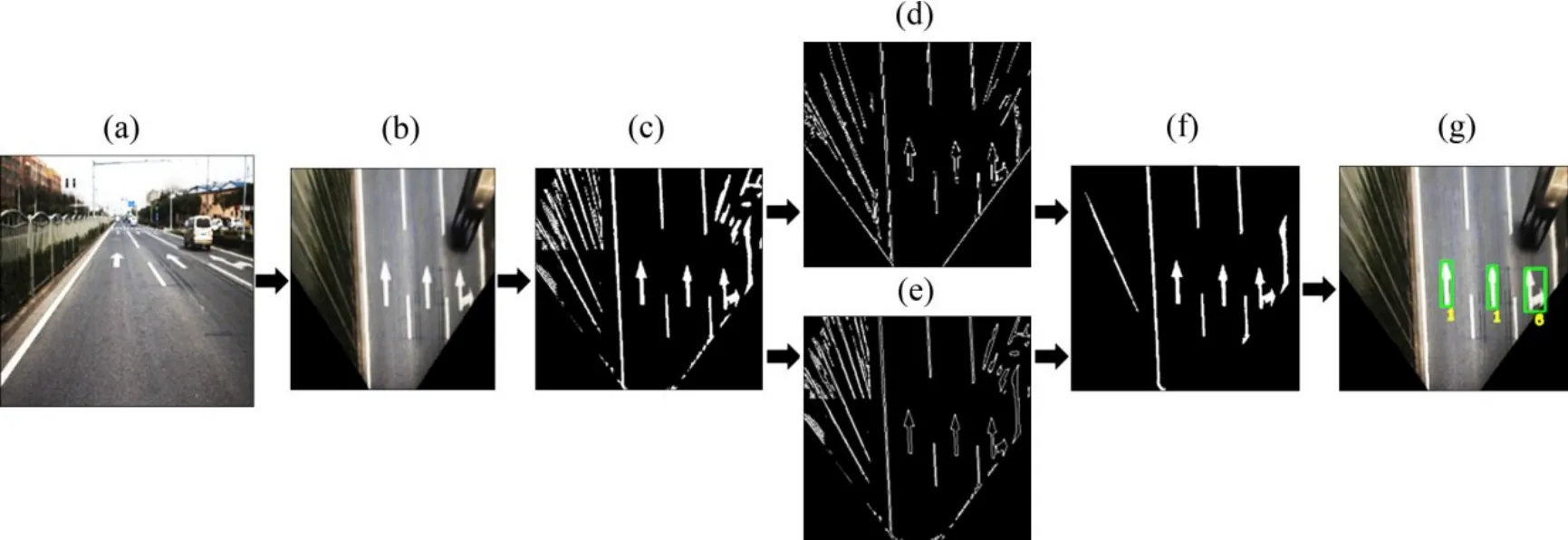
圖8 算法的檢測(cè)與識(shí)別過(guò)程Fig.8 Detection and recognition processes of algorithm
2.1 檢測(cè)和識(shí)別結(jié)果分析
為了比較非目標(biāo)濾波算法對(duì)最終檢測(cè)和識(shí)別結(jié)果的影響,分別進(jìn)行2組實(shí)驗(yàn)來(lái)確定是否使用非目標(biāo)濾波算法。這2個(gè)實(shí)驗(yàn)的實(shí)驗(yàn)條件除了1個(gè)有非目標(biāo)濾波算法和1 個(gè)沒(méi)有非目標(biāo)濾波算法之外,其他均相同。實(shí)驗(yàn)結(jié)果如表1所示。表1中,一些重要參數(shù)說(shuō)明如下:對(duì)于路況,若路面標(biāo)記磨損率小于15%,且主要特征信息不受影響,則表示路況正常,否則為磨損(極其骯臟的路面也視為磨損)。在天氣變量中,“√”表示測(cè)試集中包含該天氣條件的對(duì)應(yīng)類(lèi)別的圖像,“×”表示測(cè)試集中不包含該天氣條件的對(duì)應(yīng)類(lèi)別的圖像。
從表1可見(jiàn):當(dāng)路面磨損或變臟時(shí),算法的召回率降低,這會(huì)導(dǎo)致目標(biāo)在二值化過(guò)程中被誤認(rèn)為是背景,從而導(dǎo)致最終檢測(cè)和分類(lèi)失敗。其中,F(xiàn)P為將正樣本誤識(shí)別為負(fù)樣本的數(shù)量,即未正確識(shí)別出來(lái)的標(biāo)記數(shù)。
由實(shí)驗(yàn)統(tǒng)計(jì)結(jié)果可以發(fā)現(xiàn):非目標(biāo)濾波算法的使用對(duì)誤報(bào)數(shù)量產(chǎn)生了很大影響,誤報(bào)總數(shù)由2 036 個(gè)減少到268 個(gè),整體識(shí)別準(zhǔn)確率由90.90%提高到98.69%。但非目標(biāo)濾波算法對(duì)召回率的影響很小,總召回率僅從94.31%下降到94.02%,說(shuō)明非目標(biāo)濾波算法幾乎不會(huì)誤濾出真實(shí)道路標(biāo)記。此外,非目標(biāo)濾波的使用顯著提高了算法的整體性能,精確率和召回率的調(diào)和平均數(shù)F1從92.57%提高到96.30%。
不同天氣條件下的識(shí)別準(zhǔn)確率、召回率和F1如圖9所示。從圖9可見(jiàn):在多云情況下,道路上沒(méi)有強(qiáng)烈的陰影和反光效果,準(zhǔn)確率、召回率和F1都接近98%;然而,在陽(yáng)光充足的條件下,路邊的樹(shù)木會(huì)對(duì)道路產(chǎn)生大量的強(qiáng)烈陰影,干擾目標(biāo)檢測(cè),導(dǎo)致算法精度下降;在小雨條件下,環(huán)境的照度較低,潮濕的路面上有反射,可能導(dǎo)致目標(biāo)檢測(cè)失敗,召回率低。雖然惡劣的天氣會(huì)對(duì)算法產(chǎn)生一定的影響,但算法整體性能良好,F(xiàn)1保持在92%以上,說(shuō)明算法具有良好的魯棒性。
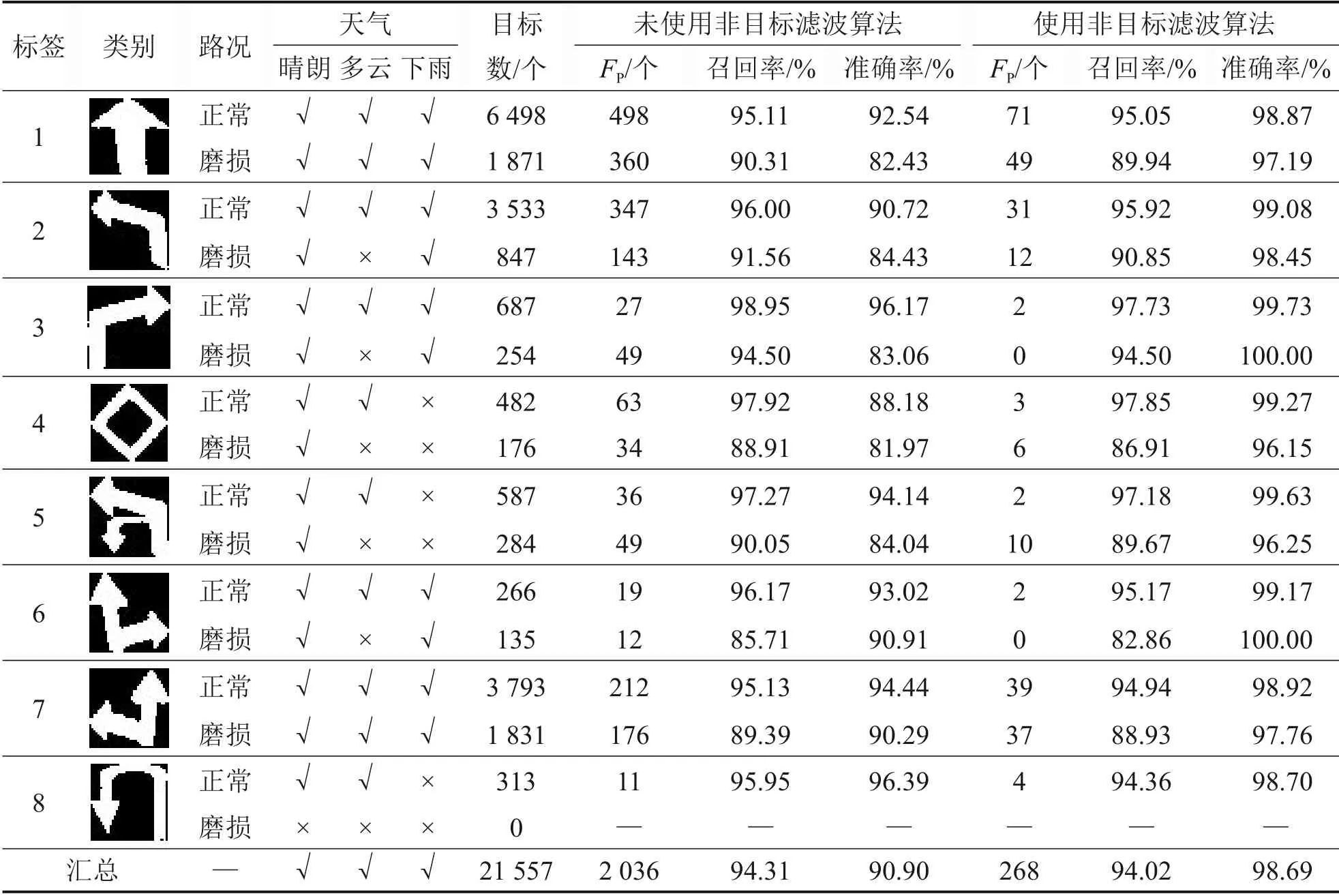
表1 道路標(biāo)記檢測(cè)與識(shí)別統(tǒng)計(jì)結(jié)果Table 1 Statistical results of detection and recognition of road markings
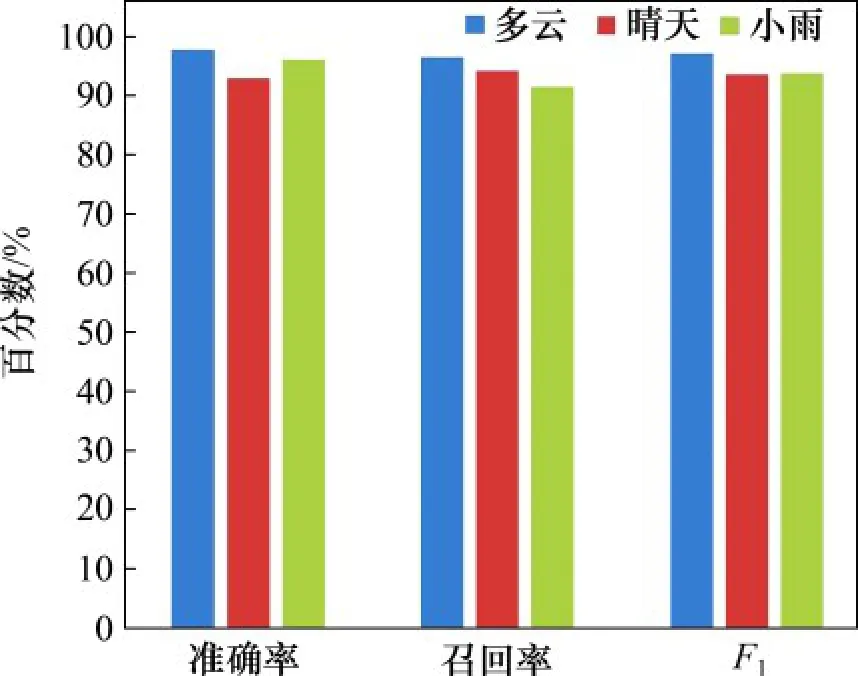
圖9 不同天氣條件下的識(shí)別準(zhǔn)確率、召回率和F1Fig.9 Identification accuracy,recall rate and F1 under different weather conditions
2.2 與其他算法的比較
為了比較不同算法的性能,將文獻(xiàn)[5-6,14-18]中的算法和本文算法的實(shí)驗(yàn)結(jié)果進(jìn)行比較,如表2所示。
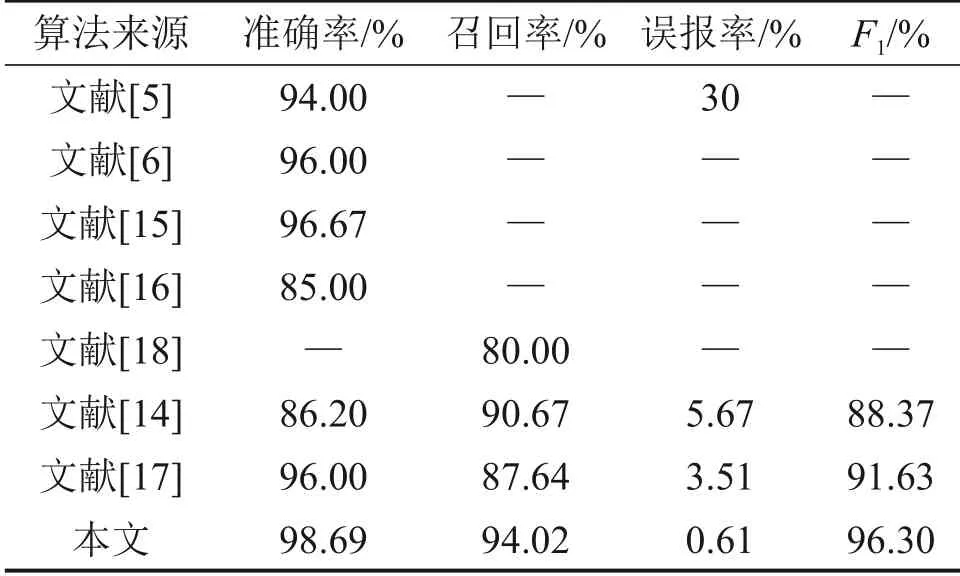
表2 不同算法的識(shí)別性能Table 2 Recognition results of different algorithms
從表2 可以看出,本文算法與其他算法相比,召回率高,精確率和召回率的調(diào)和平均數(shù)F1高,誤報(bào)率低。
另外,本文算法是基于俯視圖進(jìn)行檢測(cè)和識(shí)別,確保目標(biāo)矩形內(nèi)不會(huì)有車(chē)道或其他干擾跡象。然而,文獻(xiàn)[14,16]中的方法直接從原始圖像中檢測(cè)和裁剪目標(biāo),這可能導(dǎo)致目標(biāo)檢測(cè)框包含其他干擾,從而導(dǎo)致識(shí)別錯(cuò)誤。
通過(guò)比較發(fā)現(xiàn):文獻(xiàn)[5,14]中的方法在檢測(cè)前并沒(méi)有很好地濾除非目標(biāo)干擾,在檢測(cè)和識(shí)別的后期也不能完全濾除干擾,導(dǎo)致誤報(bào)率較高。
在本文算法中,經(jīng)過(guò)二值化后,首先使用非目標(biāo)濾波算法濾除大部分干擾,然后在識(shí)別后期使用2種不同的特征描述道路標(biāo)線輪廓,并融合它們的結(jié)果,保證了系統(tǒng)的識(shí)別精度高,誤報(bào)率低。
各種路況的道路標(biāo)記檢測(cè)與識(shí)別的結(jié)果如圖10 所示。從圖10 可見(jiàn):檢測(cè)和識(shí)別道路標(biāo)記的視覺(jué)結(jié)果較好,它在絕大多數(shù)復(fù)雜的道路場(chǎng)景下都保持了良好的性能。但由于信息不足,很臟的道路可能會(huì)導(dǎo)致識(shí)別失敗。
2.3 目標(biāo)定位及誤差補(bǔ)償結(jié)果
圖11 所示為補(bǔ)償前后算法測(cè)量距離輸出與誤差比較。其中,圖11(a)和圖11(b)中的橫坐標(biāo)為使用標(biāo)尺測(cè)量的實(shí)際距離,圖11(a)中縱坐標(biāo)為算法的測(cè)量距離,圖11(b)中縱坐標(biāo)為測(cè)量距離誤差。
由圖11 可見(jiàn):近距離(<15 m)算法測(cè)量誤差小于30 cm,在一定距離內(nèi)最大誤差可達(dá)1.11 m,但采用非線性補(bǔ)償算法后,無(wú)論實(shí)際距離多長(zhǎng),誤差均保持在30 cm以?xún)?nèi),保證了無(wú)人駕駛系統(tǒng)對(duì)道路標(biāo)線的精確定位。
2.4 實(shí)時(shí)性能分析
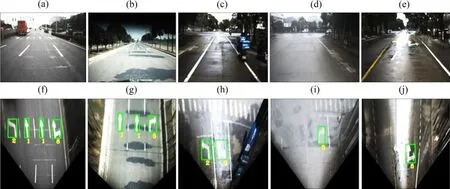
圖10 各種路況的道路標(biāo)記檢測(cè)與識(shí)別的結(jié)果Fig.10 Examples of various road marking detections and recognition results colored with green box
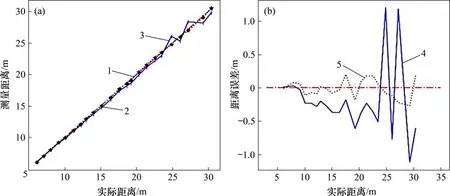
圖11 補(bǔ)償前后算法輸出與誤差比較Fig.11 Comparison of output and error before and after compensation
標(biāo)準(zhǔn)化組織3GPP定義了幾個(gè)低延遲場(chǎng)景,主要集中在自動(dòng)駕駛上。自動(dòng)駕駛制動(dòng)反應(yīng)時(shí)間是系統(tǒng)響應(yīng)時(shí)間,包括網(wǎng)絡(luò)云計(jì)算和車(chē)間協(xié)商處理時(shí)間,以及車(chē)輛系統(tǒng)計(jì)算和制動(dòng)處理時(shí)間。若速度為100 km/h 的制動(dòng)距離不超過(guò) 30 m,則系統(tǒng)的整體響應(yīng)時(shí)間不能超過(guò)10 ms,而最好的F1賽車(chē)手的響應(yīng)時(shí)間大約為100 ms。
道路標(biāo)記識(shí)別系統(tǒng)的硬件平臺(tái)為Advantech ARK-3500 IPC, Intel (R) Core i7-3610QE CPU @2.3GHz, 15.76G RAM,使用的編程語(yǔ)言為C++。共使用分辨率為1 920 像素×1 200 像素的29 850 幅彩色圖像,對(duì)道路標(biāo)線進(jìn)行檢測(cè)和識(shí)別。識(shí)別系統(tǒng)各階段的平均運(yùn)行時(shí)間見(jiàn)表3。
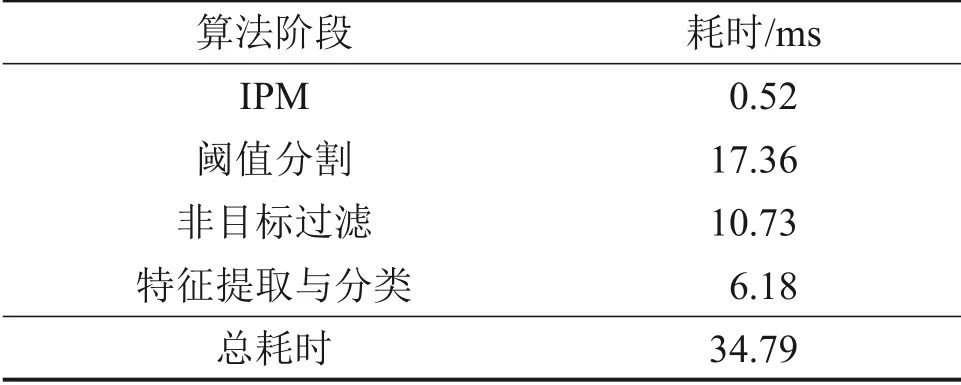
表3 各階段算法運(yùn)行時(shí)間Table 3 Time of algorithm running at each stage
3 結(jié)論
1)提出了一種基于輪廓重合度分析的道路標(biāo)記識(shí)別算法,該算法在不同光照、天氣、道路等交通環(huán)境條件下保持了良好的檢測(cè)和識(shí)別性能。提出的非目標(biāo)濾波算法有效地濾除了普通二值圖像中81%以上的干擾,并將輪廓分析結(jié)果與基于EFDs 的支持向量機(jī)識(shí)別結(jié)果相結(jié)合,對(duì)最終結(jié)果進(jìn)行了改進(jìn)。該算法的最終召回率以及精確率和召回率的調(diào)和平均數(shù)F1較高,誤報(bào)率較低。
2)本文提出的道路標(biāo)線識(shí)別算法可以在未來(lái)應(yīng)用于無(wú)人駕駛場(chǎng)景。道路標(biāo)線可以為道路上行駛的車(chē)輛提供預(yù)告性的信息,對(duì)無(wú)人駕駛系統(tǒng)得出正確的反應(yīng)策略具有重要作用。因此,及時(shí)、準(zhǔn)確地識(shí)別出車(chē)輛前方的道路標(biāo)線,可以為無(wú)人駕駛技術(shù)提供關(guān)鍵、可靠的道路信息。特別地,在地圖信息的通信信號(hào)質(zhì)量不佳的情況下,道路標(biāo)記提供的信息顯得尤為重要。
3)提出的定位補(bǔ)償算法有效地提高了道路標(biāo)線檢測(cè)的精度,可以滿(mǎn)足無(wú)人駕駛技術(shù)對(duì)道路標(biāo)線檢測(cè)精度的要求。
本文研究還存在一些不足,如:該算法只能用于白天的道路輪廓分析和道路標(biāo)記識(shí)別,不能用于夜晚的道路輪廓分析和道路標(biāo)記識(shí)別。其次,該算法只能識(shí)別幾種常見(jiàn)的國(guó)際道路標(biāo)記,而不能全部識(shí)別。未來(lái)的工作核心將聚焦于擴(kuò)展訓(xùn)練數(shù)據(jù)集類(lèi)別,增加算法能識(shí)別的道路標(biāo)記種類(lèi),使算法功能更全面。其次,需要研究適合夜晚場(chǎng)景下的道路標(biāo)記識(shí)別算法,并進(jìn)行針對(duì)性分類(lèi)訓(xùn)練和實(shí)驗(yàn)。
猜你喜歡
中國(guó)設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48