
面向智能搬運機的單片機軟件控制*
2020-08-26 05:14:18陳文媛劉妍寧盧桂萍吳明友
機電工程技術 2020年7期
文 豪,陳文媛,劉妍寧,盧桂萍,吳明友
(1.廣東科學技術職業學院,廣東珠海 519090;2.北京理工大學珠海學院,廣東珠海 519088)
0 引言
最早的搬運機大約出現于1960 年,由美國人發明制作,可實現物品的自動搬運功能[1],大大減輕了人類繁重的體力勞動,將人類從各種惡劣環境下解脫出來,是當今工業相關行業重要的工具手段[2]。
傳統的搬運機常在機械本體結構的基礎上[3],使用電氣控制的方式實現機器的搬運動作[4]。然而隨著機械化和自動化的不斷發展及日益復雜的搬運動作控制,出現了一些更高級的智能控制方式,可有效實現搬運機的智能升級。PLC 是常用的自動化可編程邏輯控制器,將其運用于搬運機的電氣控制[5],可通過邏輯控制的程序編寫實現搬運機穩定的智能控制。但是目前PLC 的硬件設備價格昂貴,一些環境要求相對不高的場合,則會使用價格相對更低的ARM 芯片進行控制[6]。采用Arduino[7]和STM32[8]的編程控制是其中可行的兩種搬運機智能升級控制方案,但其編程相對復雜,對于搬運機的工作控制也相對浪費芯片的硬件資源。
51 系列的單片機是當前應用最廣泛的8 位單片機之一,其價格低廉,性能穩定,可有效滿足一些工業場景的實時智能化控制需求。本文使用51系列單片機,在原有電氣控制搬運機的基礎上實現軟件控制的智能升級,并最終解決搬運機的運動軌跡控制與物料的準確運送。
1 搬運機及其電氣控制
本文研究的搬運機使用傳統的電氣控制方式,如圖1所示。

圖1 搬運機實物外觀
該設備的電氣控制相關元器件如圖2 所示,其中包含了若干個24 V繼電器、氣缸、傳感器、手轉閥、變壓器、機械爪等元器件。先通過電氣控制系統控制機械爪的氣缸供氣閥門,實現物料的抓取,再通過交流220 V強電控制4個二位五單電控電磁閥通斷來改變氣路,進而控制導軌氣缸的運動方向推動滑塊移動,從而完成物料搬運的全部操作。目前該搬運機由于采用由唯一電氣元件組成的電氣控制系統,僅能實現固定的物料搬運動作。若要改變搬運機的動作次序,則需要重新設計機器的電氣控制圖,并將對應的電氣元件重新組裝接線。為便于搬運機的智能化控制,將51單片機及對應的模塊原件接入至原機器,可實現簡單編程即能改變搬運機動作次序的效果。
2 模塊分析與程序設計
欲對搬運機進行智能升級,首先要根據機械本體結構與電氣控制要求進行模塊劃分及功能分析,在此基礎上對每個模塊進行電路改造,并最終接入至51 單片機進行統一的控制。本文研究的搬運機可劃分為3個模塊:導軌控制模塊、導軌限位模塊及機械爪控制模塊。
2.1 導軌控制模塊
導軌控制模塊如圖3 所示,導軌運動有多個方向,但為了保證物料運輸平穩,每次僅能實現1 個方向的控制運動,在電氣控制中使用合適的觸點設計避免不同運動方向的相互干涉。
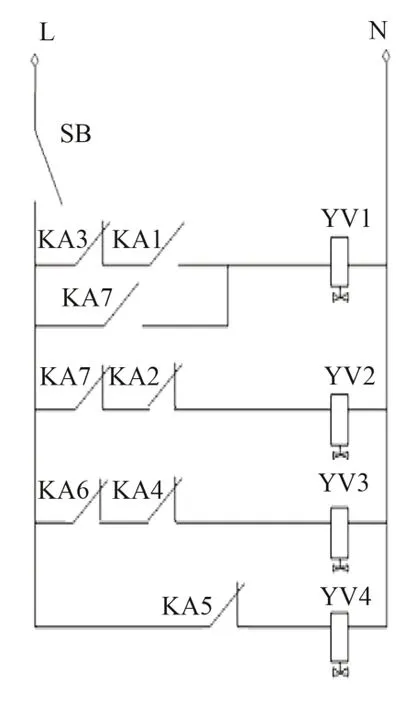
圖3 導軌控制模塊的電氣控制原理圖
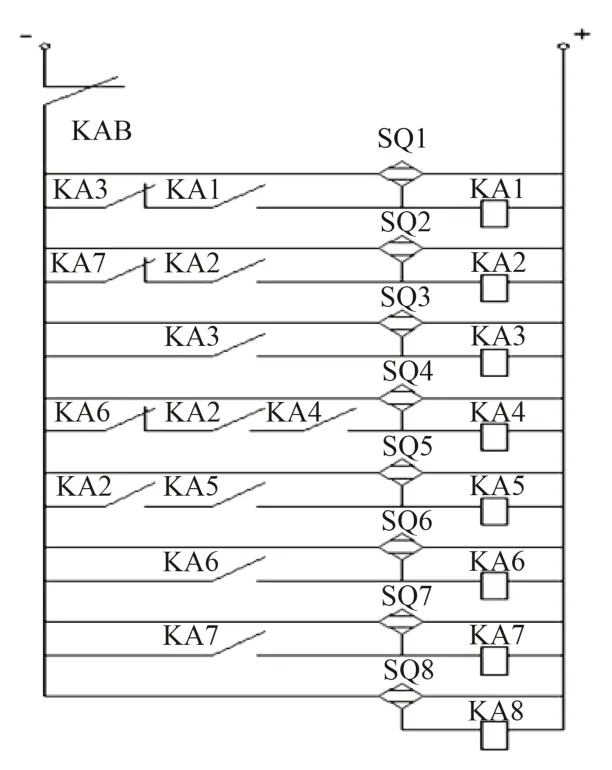
圖4 導軌限位模塊的電氣控制原理圖
2.2 導軌限位模塊
導軌限位模塊每個方向的導軌都有極限位置,滑塊位置超越了則應該停止該方向的繼續運動。導軌限位模塊的電氣控制原理圖如圖4所示,限位開關加入至對應的導軌控制電氣控制中,在導軌運動控制的過程中反饋滑塊位置,實現物料搬運的動作次序依次執行。
2.3 機械爪控制模塊
機械爪為氣動式,電氣控制中只需對應氣缸的通電方向即可實現機械爪抓與放的動作。氣缸運動方向由電磁閥控制,圖5所示為電磁閥控制氣缸運動方向原理,電磁閥可改變氣路的連接方式,從而實現氣缸左、右兩腔的供氣與否并推動氣缸運動。
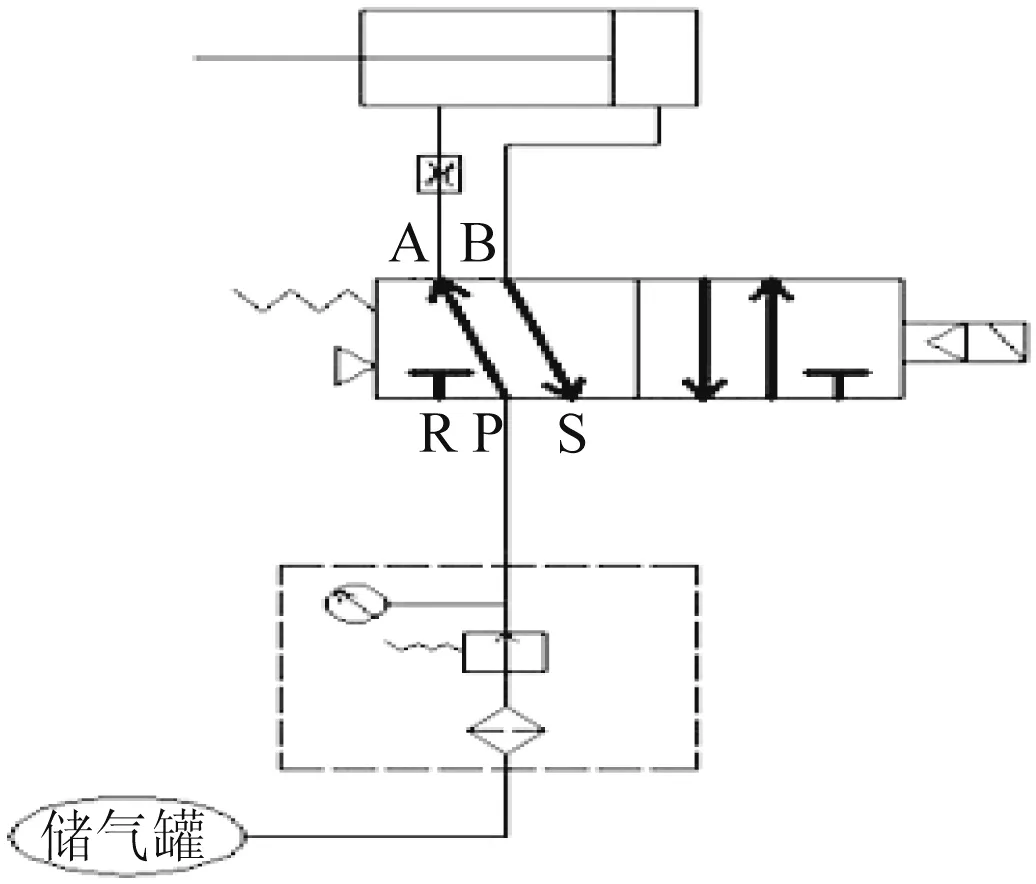
圖5 電磁閥控制氣缸運動方向原理
使用51單片機代替原有的電氣控制系統,需要對原有的電氣元器件及電路接線進行改造,其中的重點就是實現以上3個模塊的對應轉換。其中,單片機工作首先需要接入最小系統;限位傳感器可選用單片機對應的型號進行直接替代及接線控制;氣缸由強電控制,需要借助繼電器實現單片機引腳的轉換控制;為便于搬運機整體運行狀態的顯示讀取,添加數碼管顯示單元。使用Proteus軟件繪制,智能搬運機的單片機軟件控制仿真圖如圖6所示,其中繼電器與傳感器電路無法直接繪制,使用其他元件替代仿真。

圖6 單片機軟件控制的電路仿真圖
在此基礎上,編寫要求運行效果的軟件代碼,即可實現單片機對智能搬運機的完全控制。單片機的程序代碼一般可以使用C 語言或匯編語言編寫,但其程序都是逐句執行的。因此,單片機的程序控制需要結合實際運行的模塊接口次序,制定對應的算法控制流程,再在此基礎上對應地編寫代碼。對搬運機智能升級后實現原來工作動作次序的軟件控制流程圖如圖7所示,對應的軟件程序則可實現搬運機原來的工作動作次序。
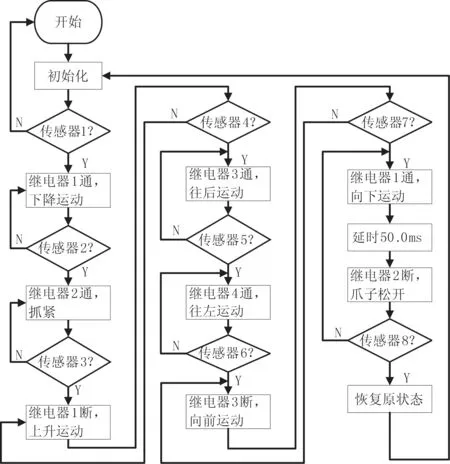
圖7 單片機的軟件控制流程圖
3 實物安裝與工作測試
根據所設計的單片機軟件控制電路,將對應的電子元件替代接入至搬運機中,并把軟件程序燒錄至單片機芯片中,進行智能搬運機升級后的工作測試。其中,限位傳感器的安裝分布如圖8所示,單片機系統與氣缸電磁閥的接線測試如圖9所示。
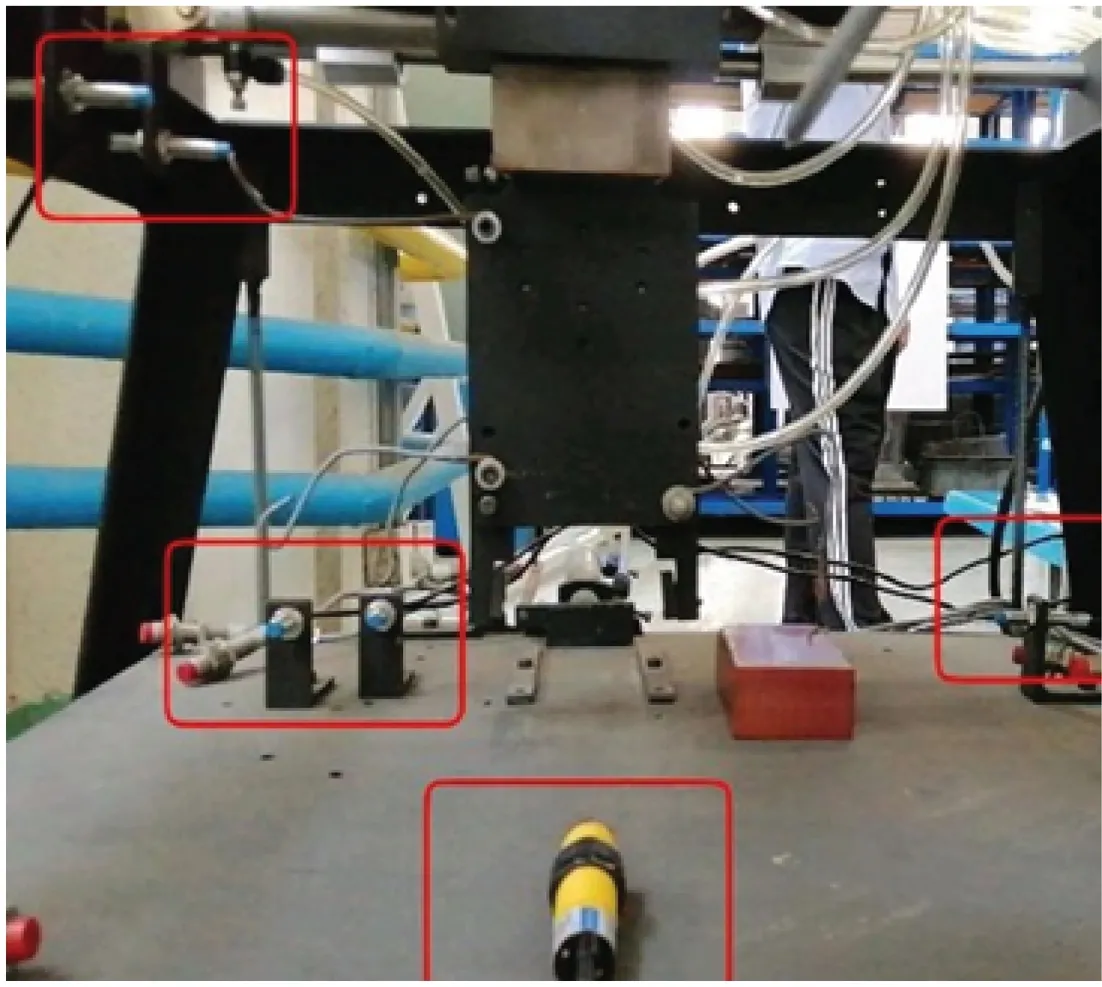
圖8 限位傳感器的安裝分布
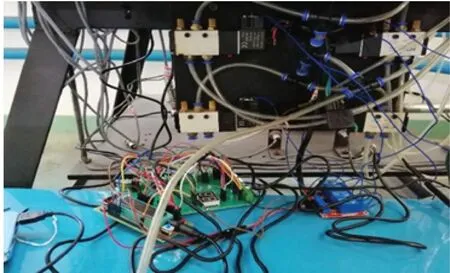
圖9 單片機系統與氣缸電磁閥的接線測試
測試表明,本文研究的單片機控制系統可有效代替原來的電氣控制系統,實現了搬運機的智能升級。搬運機工作動作次序的修改也更加智能化,只需修改單片機程序代碼即可。
4 結束語
針對傳統電氣控制的搬運機智能化升級,本文使用51單片機作為智能搬運機的控制核心,實現了基于計算機編程的軟件控制。基于搬運機的模塊劃分與工作分析,設計了單片機的控制電路及編程思路,解決了智能搬運機的軟件與硬件協調工作方法。最后進行了實物安裝與工作測試,結果表明:單片機的軟件控制可有效控制搬運機的運動軌跡并使物料準確運送到位。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
通信電源技術(2018年5期)2018-08-23 01:16:18
電子制作(2017年19期)2017-02-02 07:08:54
山東工業技術(2016年15期)2016-12-01 05:31:49
