
基于單片機(jī)的無(wú)線(xiàn)遙控小車(chē)設(shè)計(jì)與實(shí)現(xiàn)
2020-08-26 07:36:34張翠云
機(jī)電工程技術(shù) 2020年7期
張翠云
(河南工業(yè)和信息化職業(yè)學(xué)院,河南焦作 454000)
0 引言
5G時(shí)代的到來(lái),給智能化機(jī)器人帶來(lái)飛速發(fā)展的機(jī)遇。為改善工作環(huán)境,減輕勞動(dòng)強(qiáng)度,各行各業(yè)都開(kāi)始應(yīng)用智能化機(jī)器人。許多國(guó)家把創(chuàng)新教育、科技發(fā)展的競(jìng)爭(zhēng)手段聚焦于智能化機(jī)器人的發(fā)展。綜合網(wǎng)絡(luò)技術(shù)、電子技術(shù)、自控技術(shù)等多個(gè)學(xué)科,以單片機(jī)為核心的智能化小車(chē)得到了快速發(fā)展。智能化小車(chē)可以用在噴漆、消防、電纜溝查詢(xún)、農(nóng)藥噴灑、管道救援、家庭玩具等多個(gè)領(lǐng)域[1-3]。本文著重介紹無(wú)線(xiàn)遙控小車(chē)的設(shè)計(jì)思路與設(shè)計(jì)原理,討論如何通過(guò)單片機(jī)、電機(jī)驅(qū)動(dòng)模塊L293D、四按鍵遙控器實(shí)現(xiàn)小車(chē)的基本功能。
1 遙控小車(chē)系統(tǒng)整體設(shè)計(jì)方案
本文設(shè)計(jì)的無(wú)線(xiàn)遙控小車(chē)系統(tǒng)由4 個(gè)模塊組成:控制器模塊、遙控器模塊、電機(jī)驅(qū)動(dòng)模塊以及電機(jī)模塊。控制器模塊采用單片機(jī)、復(fù)位電路、晶振電路組成。遙控器編碼芯片PT2262通過(guò)315 MHz調(diào)幅發(fā)射編碼按鍵信號(hào),遙控接收電路接收信號(hào)后通過(guò)PT2272-M4 解碼輸入給控制器處理,并通過(guò)電機(jī)驅(qū)動(dòng)模塊控制2 臺(tái)電機(jī)運(yùn)轉(zhuǎn),實(shí)現(xiàn)小車(chē)前進(jìn)、后退、左轉(zhuǎn)和右轉(zhuǎn)的功能。無(wú)線(xiàn)遙控小車(chē)系統(tǒng)框圖如圖1所示。

圖1 遙控小車(chē)系統(tǒng)框圖
2 遙控小車(chē)系統(tǒng)硬件組成
2.1 遙控器選擇
遙控器選用基于PT2262/PT2272 無(wú)線(xiàn)通信模塊[4-7]。編碼芯片PT2262以及解碼芯片PT2272 是中國(guó)臺(tái)灣普城公司生產(chǎn)的一種CMOS工藝制造的低功耗、低價(jià)位的通用編解碼電路,是目前在無(wú)線(xiàn)通信電路中較為常用的芯片。
PT2262/PT2272 最多可有12 位(A0 ~A11)三態(tài)(懸空、接高電平、接低電平)地址設(shè)定管腳,任意組合可提供531 441個(gè)地址碼。PT2262 最多可有6 位(D0~D5)數(shù)據(jù)端管腳,設(shè)定的地址碼和數(shù)據(jù)碼從17腳DOUT串行輸出。
PT2272解碼芯片有不同的后綴,后綴不同所表示的功能也不同。有L4/M4/L6/M6之分,其中L表示鎖存輸出,數(shù)據(jù)只要成功接收就能一直保持對(duì)應(yīng)的電平狀態(tài),直到下次遙控?cái)?shù)據(jù)發(fā)生變化時(shí)改變。M 表示非鎖存輸出,數(shù)據(jù)腳輸出的電平是瞬時(shí)的,而且和發(fā)射端是否發(fā)射相對(duì)應(yīng),而后綴的6 和4 表示有幾路并行的控制通道。當(dāng)采用4 路并行數(shù)據(jù)時(shí)(PT2272 -M4),對(duì)應(yīng)的地址編碼應(yīng)該是8位,如果采用6 路的并行數(shù)據(jù)時(shí)(PT2272 -M6),對(duì)應(yīng)的地址編碼應(yīng)該是6 位。本設(shè)計(jì)中由于要控制小車(chē)的前進(jìn)、后退、左轉(zhuǎn)、右轉(zhuǎn),因此有4個(gè)控制信號(hào),也就需要4 位地址編碼,所以本設(shè)計(jì)采用的是M4型號(hào)。
2.1.1 遙控器發(fā)射部分
遙控器發(fā)射部分選用無(wú)線(xiàn)控制芯片PT2262進(jìn)行控制信號(hào)的發(fā)射。發(fā)射電路由編碼器PT2262、315 MHz發(fā)射模塊組成。PT2262的數(shù)據(jù)輸入端D0、D1、D2、D3 的數(shù)據(jù)由4 個(gè)按鈕“前進(jìn)、后退、左轉(zhuǎn)、右轉(zhuǎn)”直接提供。當(dāng)按鈕“前進(jìn)”按下時(shí),信號(hào)經(jīng)D0 進(jìn)入PT2262,PT2262 接收到信號(hào)后,將信號(hào)調(diào)制在315 MHz 的載波上。調(diào)制信號(hào)由PT2262 的17 腳DOUT輸出,送給高頻放大電路,高頻放大電路由放大管、聲表面波諧振器、電容等組成。其中諧振器、電容組成三點(diǎn)式振蕩電路,使其頻率穩(wěn)定在315 MHz。然后經(jīng)過(guò)放大器進(jìn)行功率放大,無(wú)線(xiàn)發(fā)射出去。發(fā)射電路圖如圖2所示。
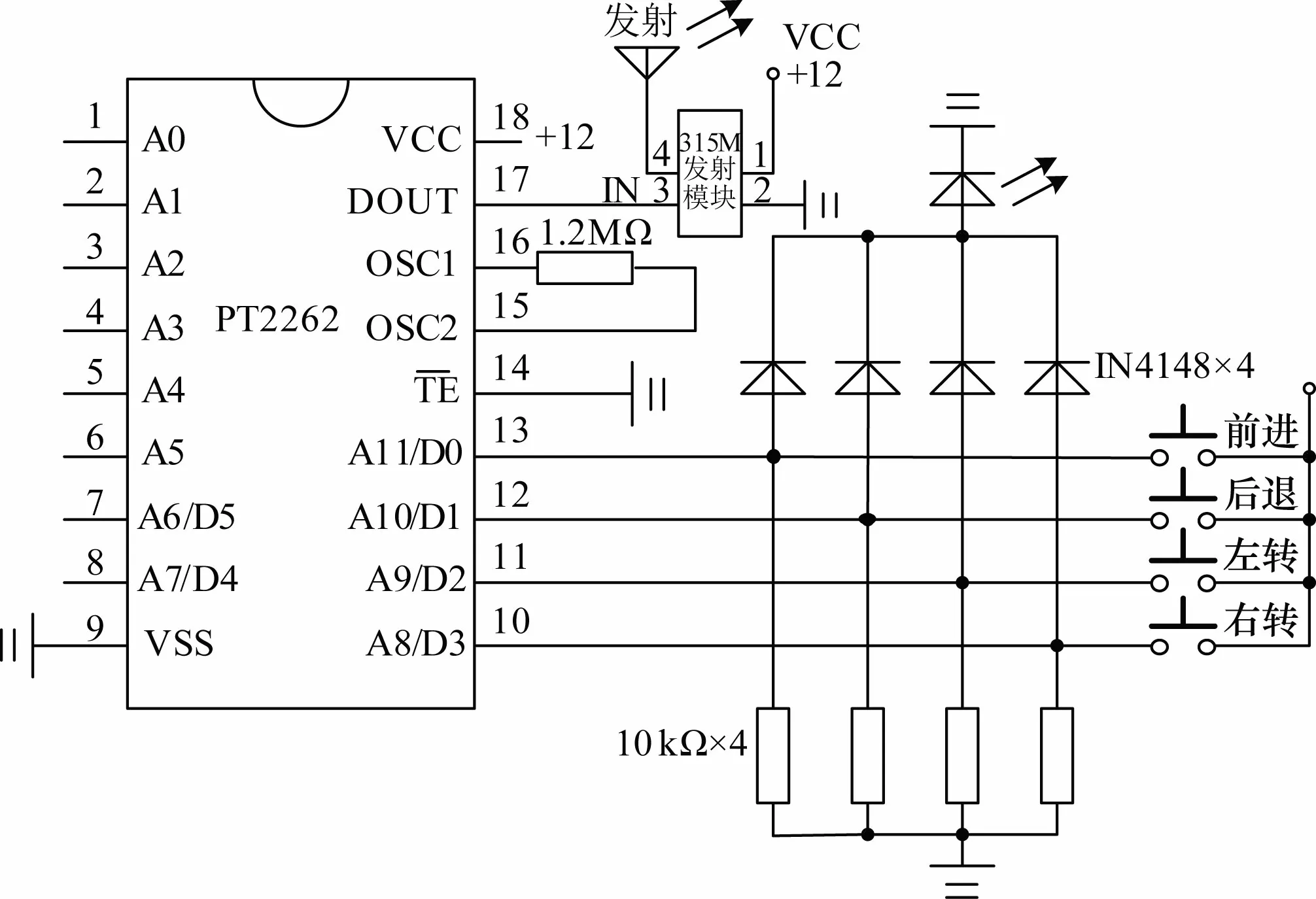
圖2 無(wú)線(xiàn)發(fā)射模塊原理圖
2.1.2 遙控器接收部分
接收電路由無(wú)線(xiàn)電接收模塊、解碼電路PT2272組成。接收電路的作用是將發(fā)射電路發(fā)出的315 MHz 高頻信號(hào)通過(guò)天線(xiàn)接收。經(jīng)過(guò)兩級(jí)高頻放大、檢波電路、濾除雜波電路,然后送入雙運(yùn)算放大器進(jìn)行兩級(jí)放大,增加信號(hào)強(qiáng)度。最后將放大后的信號(hào)送到PT2272 的數(shù)據(jù)輸入端的14 腳DIN,PT2272再將收到的信號(hào)解碼。當(dāng)接收到發(fā)射部分按鈕“前進(jìn)、后退、左轉(zhuǎn)、右轉(zhuǎn)”信號(hào)后,PT2272 將其地址碼經(jīng)過(guò)2次比較核對(duì)后,PT2272 的17 腳VT 輸出高電平,同時(shí)PT2272對(duì)應(yīng)的數(shù)據(jù)引腳D0 ~D3 也輸出高電平,而這些數(shù)據(jù)引腳與單片機(jī)的引腳P0.4、P0.5、P0.6、P0.7相連,所以對(duì)應(yīng)的單片機(jī)引腳也會(huì)輸出高電平,其原理圖如圖3所示。
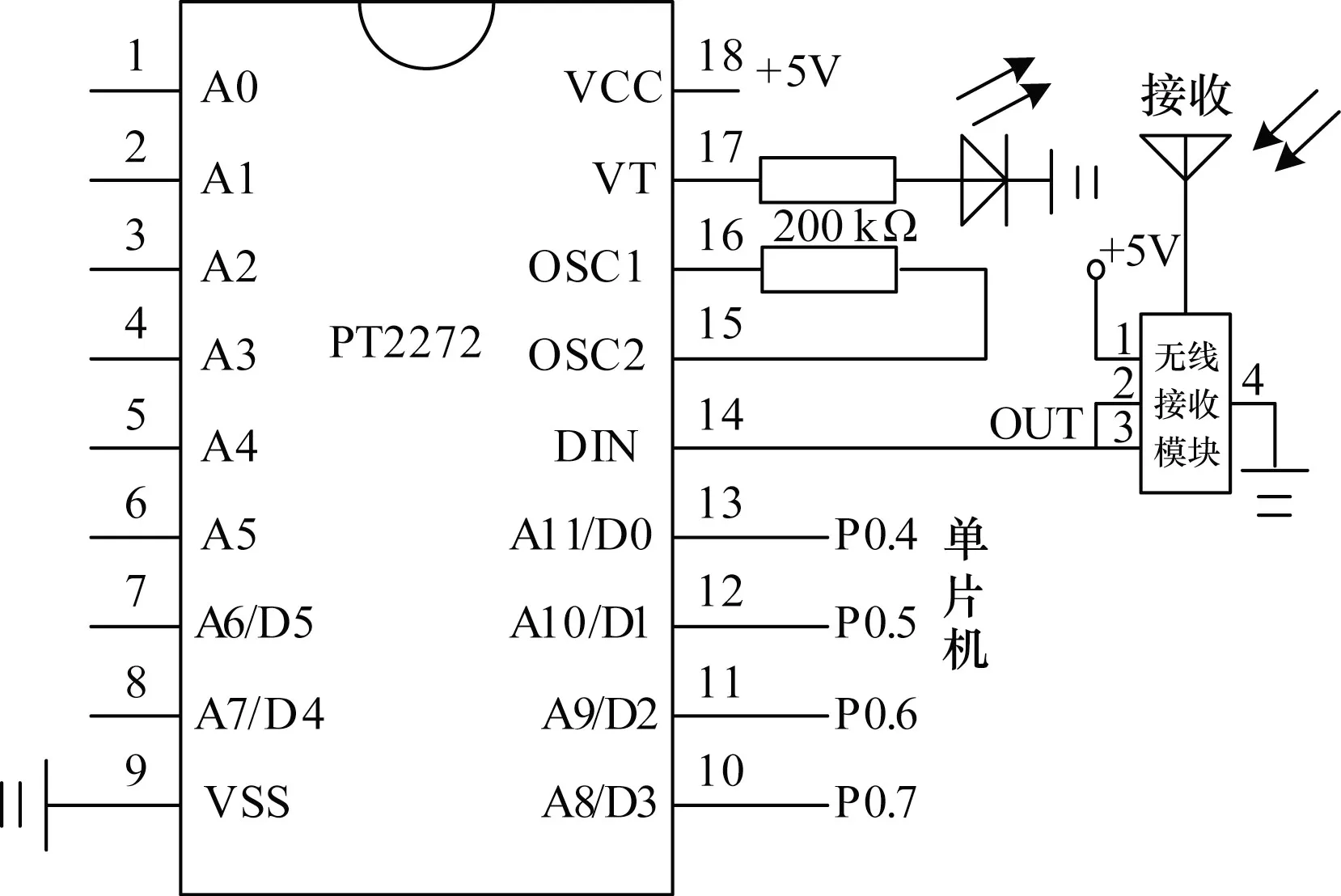
圖3 無(wú)線(xiàn)接收模塊原理圖
2.2 控制器模塊選擇
控制器是遙控小車(chē)系統(tǒng)核心元件,主要是接收解碼板信號(hào),驅(qū)動(dòng)電機(jī)驅(qū)動(dòng)模塊L293D。控制器選用國(guó)產(chǎn)STC89C52單片機(jī),內(nèi)存ROM8kB,RAM256B。價(jià)格低廉,可以降低設(shè)計(jì)成本。
2.3 電機(jī)驅(qū)動(dòng)模塊選擇
2.3.1 電機(jī)選擇
選擇工作電壓范圍DC3 ~12 V,減速比為1∶48 的減速馬達(dá)。
2.3.2 電機(jī)驅(qū)動(dòng)模塊選擇
電機(jī)驅(qū)動(dòng)選用L293D,這是一款4 通道雙橋驅(qū)動(dòng)芯片,可同時(shí)驅(qū)動(dòng)2 路直流電機(jī),輸出電流可達(dá)600 mA[8-10]。L293D主要接收控制器指令,控制電機(jī)運(yùn)轉(zhuǎn)、停止。L293D各引腳圖如圖4所示,其中引腳8、引腳16 為電源端;引腳4、引腳5、引腳12、引腳13為接地端;引腳1、引腳9為使能端;引腳2和引腳3、引腳6和引腳7、引腳14和引腳15、引腳10和引腳11 為4 個(gè)通道,其中A 為輸入,Y 為輸出。其邏輯功能如表1所示。
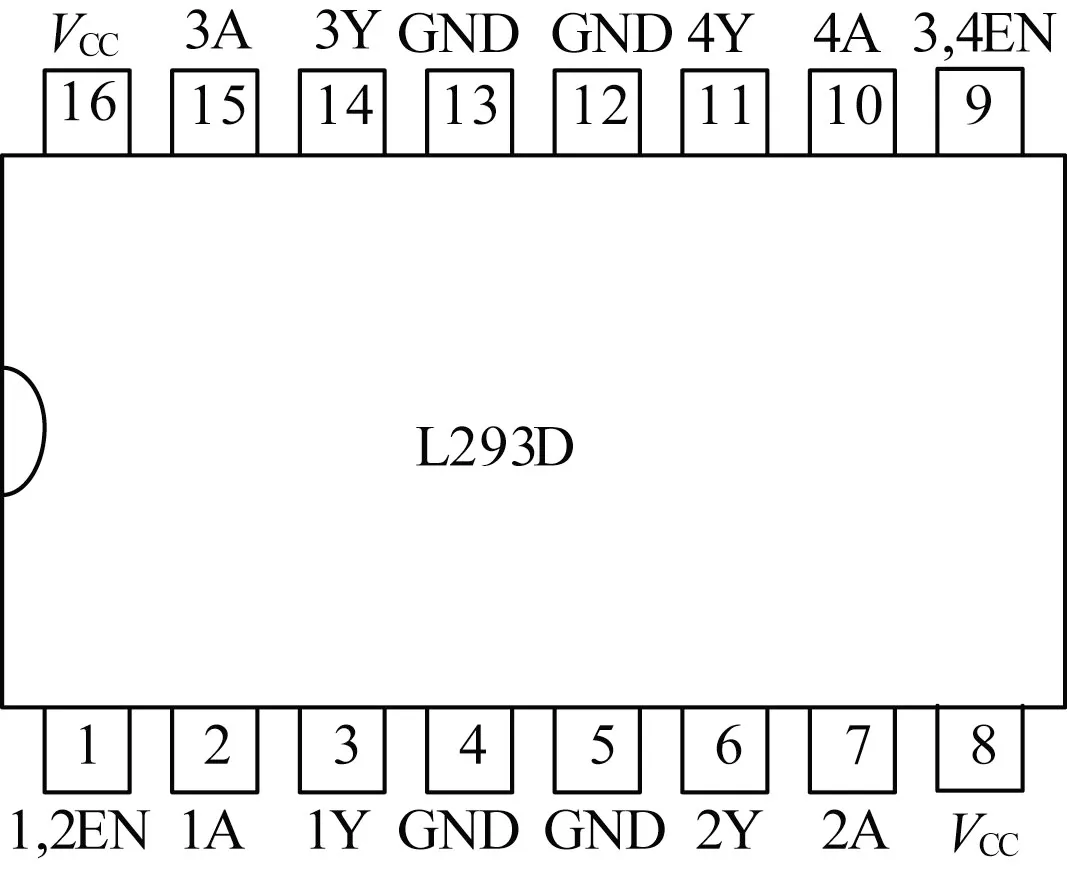
圖4 L293D引腳圖
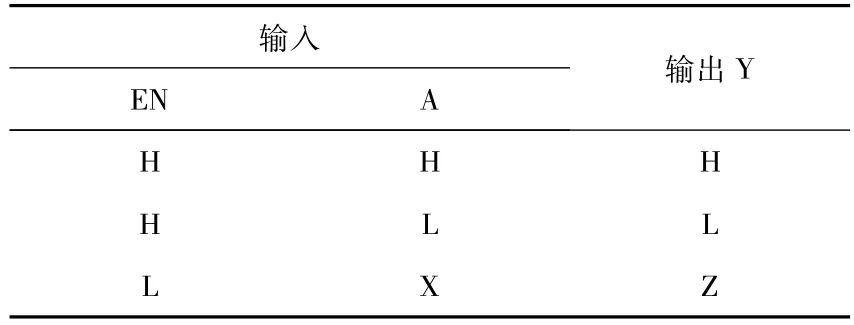
表1 L293D邏輯功能
從表1可以看出:當(dāng)使能端EN 為高電平時(shí),輸入A 的狀態(tài)與輸出Y的狀態(tài)一致。當(dāng)使能端為低電平時(shí),無(wú)論輸入A為高電平還是低電平,輸出Y均為高組態(tài)。
遙控器按鍵A、B、C、D 按下時(shí),解碼板接收信號(hào),并通過(guò)數(shù)據(jù)端D0、D1、D2、D3 輸出高電平。解碼板數(shù)據(jù)端通過(guò)導(dǎo)線(xiàn)接至單片機(jī)P0.4、P0.5、P0.6、P0.7。單片機(jī)P1.4、P1.5接至電機(jī)驅(qū)動(dòng)模塊L293D 使能端EN1、EN2;P1.2、P1.3、P1.6、P1.7 接至L293D 輸入端1A、2A、3A、4A;L293D輸出信號(hào)1Y和2Y、3Y和4Y分別接至兩個(gè)直流電機(jī)。解碼板、控制器單片機(jī)、電機(jī)驅(qū)動(dòng)模塊L293D、電機(jī)之間的具體接線(xiàn)圖如圖5所示。
3 系統(tǒng)軟件設(shè)計(jì)
以控制小車(chē)運(yùn)轉(zhuǎn)的左電機(jī)為例,當(dāng)使能端EN1(P1.4)為1,輸入端1A(P1.2)為0 時(shí),電機(jī)正轉(zhuǎn);使能端EN1(P1.4)為1,輸入端2A (P1.3)為0 時(shí),電機(jī)反轉(zhuǎn)。那么要實(shí)現(xiàn)小車(chē)前進(jìn)、后退、左轉(zhuǎn)、右轉(zhuǎn)功能,L293D 所對(duì)應(yīng)的使能端EN1、EN2 和輸入端1A、2A、3A、4A 的功能如表2所示。
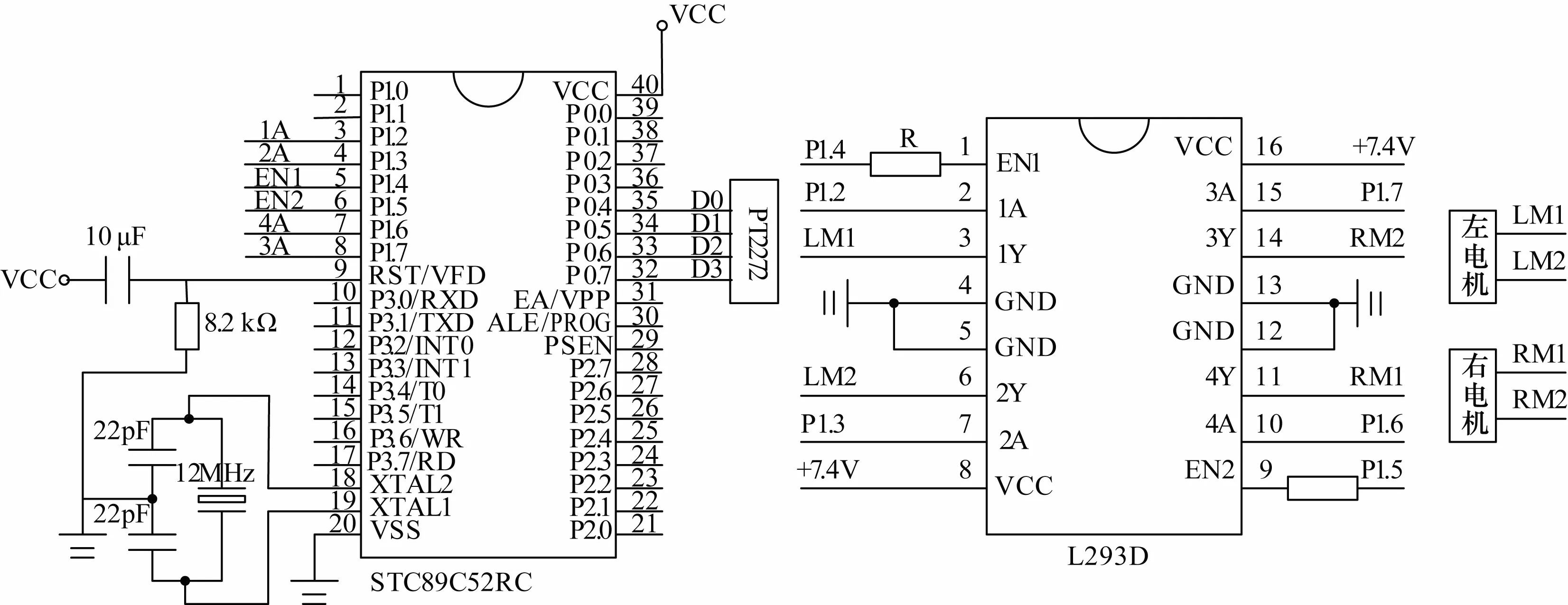
圖5 解碼板、單片機(jī)、電機(jī)驅(qū)動(dòng)芯片L293D、直流電機(jī)接線(xiàn)圖
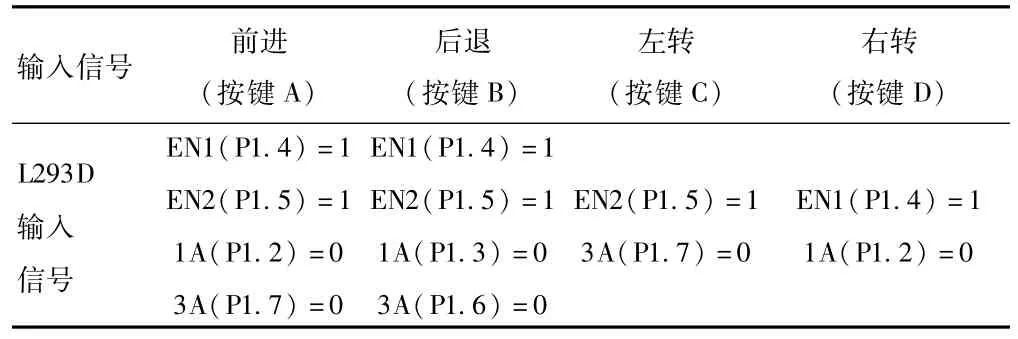
表2 小車(chē)功能表
遙控器按鍵A、B、C、D 按下時(shí),分別實(shí)現(xiàn)小車(chē)前進(jìn)、后退、左轉(zhuǎn)、右轉(zhuǎn)0.5 s。流程圖如圖6所示。
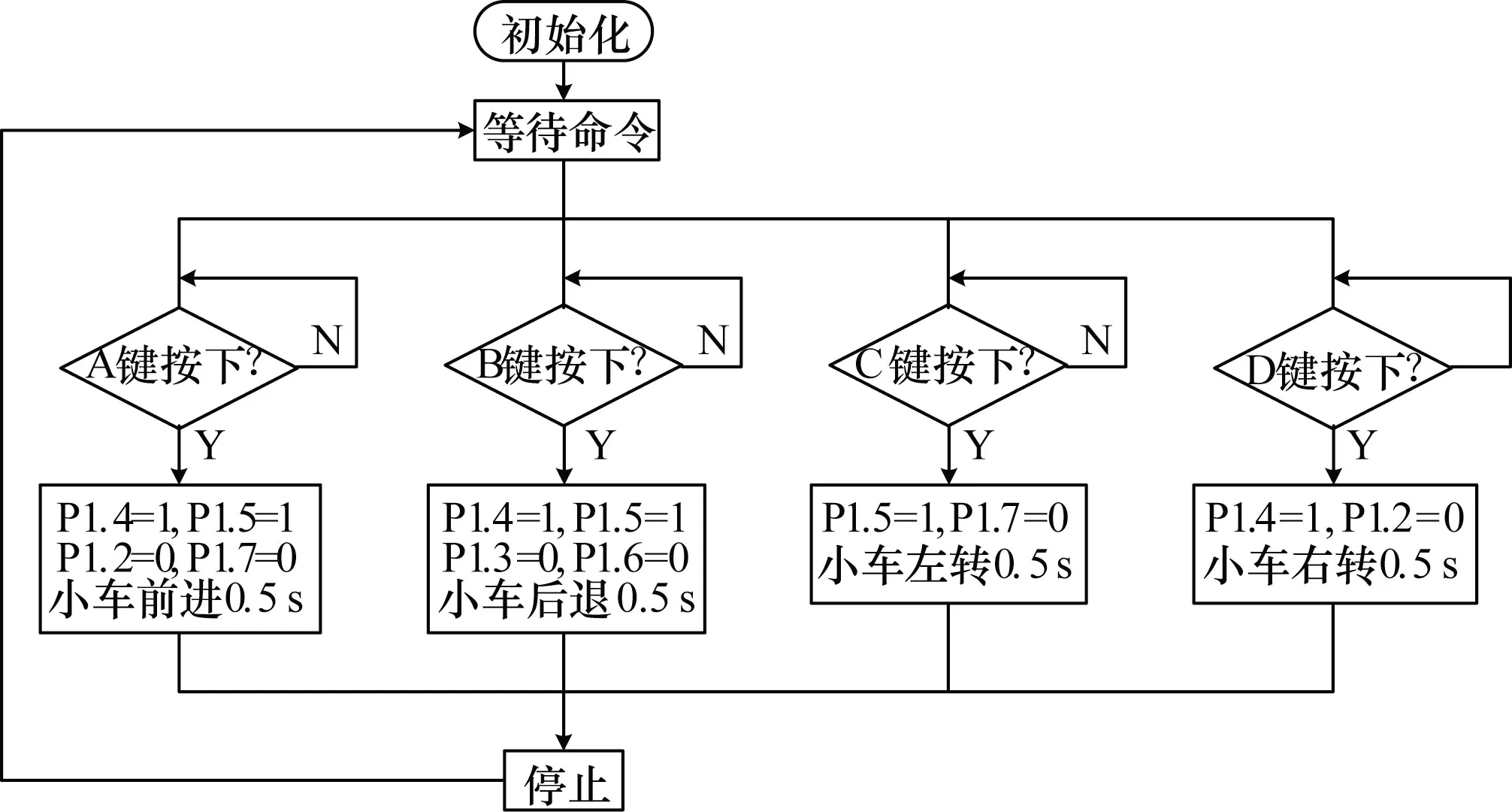
圖6 遙控小車(chē)功能實(shí)現(xiàn)流程圖
4 系統(tǒng)測(cè)試
將小車(chē)放在空曠地帶,手持遙控器在50 ~100 m 范圍內(nèi)控制小車(chē)前進(jìn)、后退、左轉(zhuǎn)、右轉(zhuǎn)。系統(tǒng)測(cè)試需要注意兩個(gè)問(wèn)題:(1)編程時(shí),遙控器按鍵A、B、C、D 需要“去抖動(dòng)”,具體去抖動(dòng)時(shí)間不盡相同,需要具體測(cè)試為準(zhǔn),否則容易出現(xiàn)“沒(méi)有按鍵按下發(fā)射信號(hào),小車(chē)運(yùn)轉(zhuǎn)”的誤操作現(xiàn)象;(2)出現(xiàn)“電機(jī)不轉(zhuǎn)或只能控制一臺(tái)電機(jī),兩臺(tái)電機(jī)不能同時(shí)運(yùn)轉(zhuǎn)等”現(xiàn)象,主要檢查元件是否損壞、程序是否起動(dòng)以及電源電壓是否正常。
5 結(jié)束語(yǔ)
本文設(shè)計(jì)的無(wú)線(xiàn)遙控小車(chē),采用帶接收解碼板的4 按鍵遙控器發(fā)射信號(hào),單片機(jī)通過(guò)解碼板接收信號(hào),并通過(guò)電機(jī)驅(qū)動(dòng)模塊L293D 驅(qū)動(dòng)2 臺(tái)直流電機(jī),實(shí)現(xiàn)小車(chē)前進(jìn)、后退、左轉(zhuǎn)、右轉(zhuǎn)基本功能。使用者可以通過(guò)遙控器控制小車(chē)進(jìn)行危險(xiǎn)環(huán)境下的操作,比如農(nóng)藥噴灑,消防滅火等,也可用作兒童玩具。整個(gè)系統(tǒng)價(jià)格低廉,易于實(shí)現(xiàn),具有較廣的應(yīng)用空間,值得推薦。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年19期)2017-02-02 07:08:27
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00
