AUV矢量推進水動力計算及水平回轉操縱性試驗
2020-08-29 12:10:12李雨田韓用波
數字海洋與水下攻防 2020年4期
關鍵詞:方向
李雨田,雷 敏,馮 朝,韓用波
(1.中國船舶重工集團有限公司第七一〇研究所,湖北 宜昌 443003;2.中國船舶科學研究中心,江蘇 無錫 214082)
0 引言
AUV能夠完成使命任務的前提是具備良好的性能,而操縱性[1-2]是AUV的基本性能,也是AUV總體技術的核心基礎,其涉及諸多學科領域。操縱性主要是指保持給定運動方向和改變運動方向的能力。對AUV來講,保持運動方向還應包括在水流中保持零速及在水中懸停、原地定位、原地回轉等特殊操縱功能的要求。同時,由于任務和能源的限制,一般的 AUV航速都不高,因此為了滿足AUV的操縱要求,除了采用舵這種常規操縱手段外,經常還需要采用橫向和垂向槽道推進器、套環等特殊操縱手段。
操縱性設計和流體動力布局[3-6]是 AUV總體設計的重要組成部分,直接影響 AUV總體性能。AUV常規流體動力布局[7]包括多種鰭舵組合布局、多推進器布局、矢量推進布局等。AUV矢量推進是指在 AUV尾部中軸線布置 1個主推進器,通過控制推進器轉速和推進器偏轉角實現AUV的操縱。相比舵控,矢量推進可以在極低速度下實現高操縱性;相比多推進器,矢量推進在空間布置及尺寸要求上有相對的優勢。因此,矢量推進在水下無人航行器推進及操縱中有好的應用前景。
1 矢量推進水動力計算
1.1 坐標系定義
考慮到研究對象為矢量推進器,在分析時設定艇體絕對坐標系和艇體局部坐標系2個坐標系。1)艇體絕對坐標系(O-XYZ):坐標原點位于球頭圓心處,X軸與航行器軸線重合,從航行器頭部指向尾部為正,垂直方向為Y方向,向上為正,Z方向按右手法則確定。2)艇體局部坐標系(O-XSYSZS):坐標原點位于球頭圓心處,XS軸與推進器軸線重合,從導管入口指向出口為正,與推進器軸線和航行器軸線確定平面垂直的方向為YS方向,即YS方向可由XS方向矢量和X方向矢量叉乘得到,ZS方向按右手法則確定。當航行器處于直航狀態,即推進器偏轉角為 0時,絕對坐標系(O-XYZ)和局部坐標系(O-XSYSZS)重合,XS軸和X軸之間的夾角即為推進器水平偏轉角,YS軸和Y軸之間的夾角即為推進器垂向偏轉角。
圖1是坐標系定義示意圖,圖2是推進器矢量偏轉角定義示意圖。
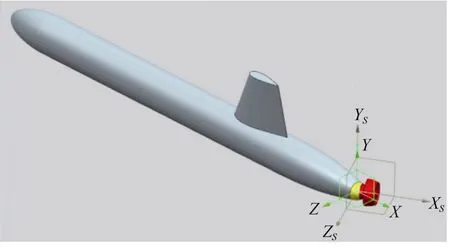
圖1 坐標系定義Fig. 1 Definition of coordinate system
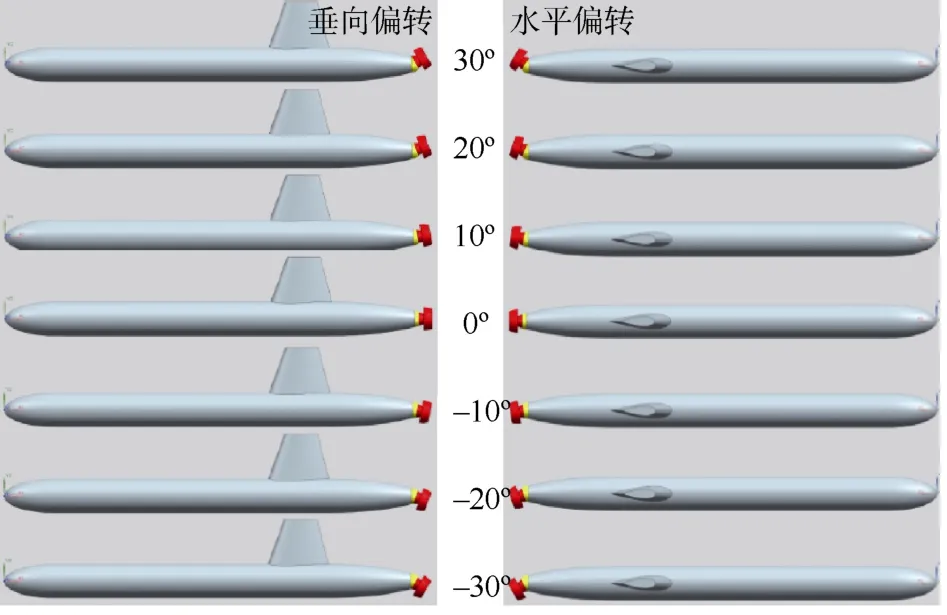
圖2 矢量偏轉角定義Fig. 2 Definition of vector deflection angle
1.2 水動力計算方法
采用CFD方法計算推進器矢量偏轉水動力參數,CFD計算控制方程包含連續性方程和RANS方程:
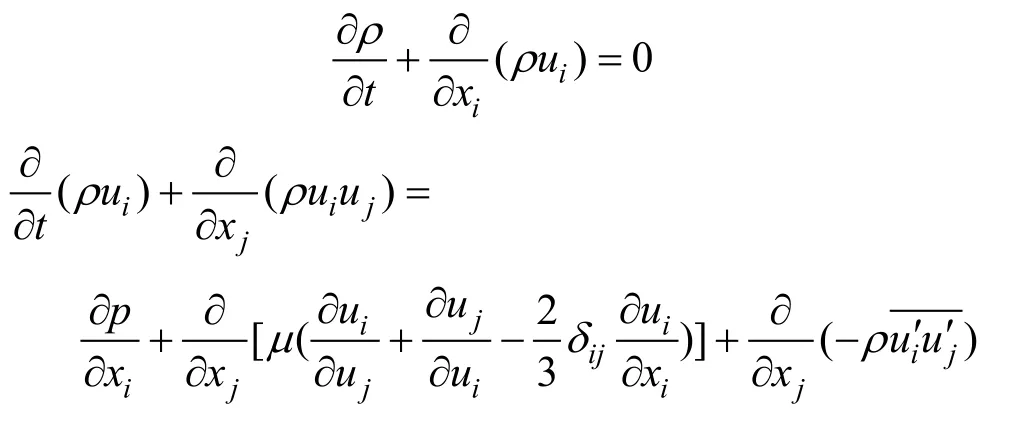
式中:ui為絕對速度在直角坐標系中的第i個分量,i=1~3;p為靜壓;μ為分子粘性系數;δij為Kronecker delta函數;為雷諾應力。雷諾應力需要由合適的湍流模型來模擬從而封閉控制方程。
本文中使用了SSTk-ω湍流模型,這是目前最常用的湍流模型之一。計算采用直接求解三維粘性不可壓RANS方程,微分方程的離散使用有限體積法。其中,對流項采用二階迎風差分格式,擴散項采用中心差分格式;壓力和速度耦合采用著名的SIMPLE方法;離散得到的代數方程使用GaussSeidel迭代求解。
計算模型中,AUV長2.46 m,直徑0.2 m,推進器直徑0.115 m,排水體積0.071 145 m3。幾何建模包括航行器和推進器幾何生成、計算域的生成和分塊,幾何建模在UG中完成。計算域包括:進口邊界,離開航行器頭部,離開艇體頭部約1倍艇體長度;出口邊界,離開導管出口約2倍艇體長度;外邊界離艇體軸中心線約1.5倍艇體長度。整個計算域分為2塊,包含轉子的旋轉域和外部靜止域。旋轉域和靜止域連接處設置為交接面。網格類型采用六面體網格,在航行器附近、推進器出口附近網格進行加密,總的網格數量約300萬。計算域和網格的劃分如圖3所示。
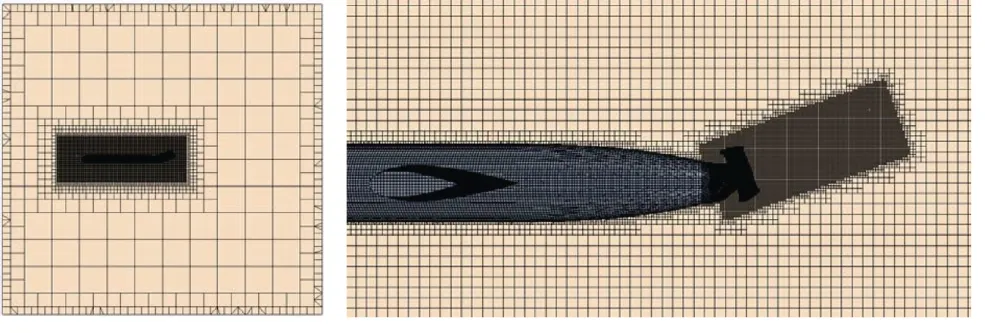
圖3 計算域和網格劃分Fig. 3 Compute domain and grid partitioning
1.3 計算結果
計算了水平方向 0°、10°、20°和 30°偏轉角下推進器的水動力。考慮到研究對象主體為回轉體,水平方向偏轉角與其它方向偏轉角下的水動力特性是比較接近的。具體計算結果見表1。為了方便表達,計算結果在艇體局部坐標系(O-XSYSZS)中給出。
表1中,θ為推進器偏轉角;KFH,Xs、KFD,Xs、KFR,Xs、KFS,Xs、KFT,Xs分別為推進器偏轉球頭、導管、轉子、定子、整個推進單元在局部坐標系(O-XSYSZS)下,XS方向的受力系數,其中KFT,Xs=KFH,Xs+KFD,Xs+KFR,Xs+KFS,Xs;KFH,Zs、KFD,Zs、KFR,Zs、KFS,Zs、KFT,Zs分別為推進器偏轉球頭、導管、轉子、定子、整個推進單元在局部坐標系(O-XSYSZS)下,ZS方向的受力系數,其中:KFT,Zs=KFH,Zs+KFD,Zs+KFR,Zs+KFS,Zs;KQR,Xs為推進器轉子在局部坐標系(O-XSYSZS)下,XS方向的扭矩系數。
圖4給出了推進器單元各部件受力系數隨偏轉角的變化關系,圖5給出了轉子扭矩系數隨偏轉角的變化關系。

表1 矢量推進器水動力計算結果Table 1 Hydrodynamic calculation results of vectored thruster
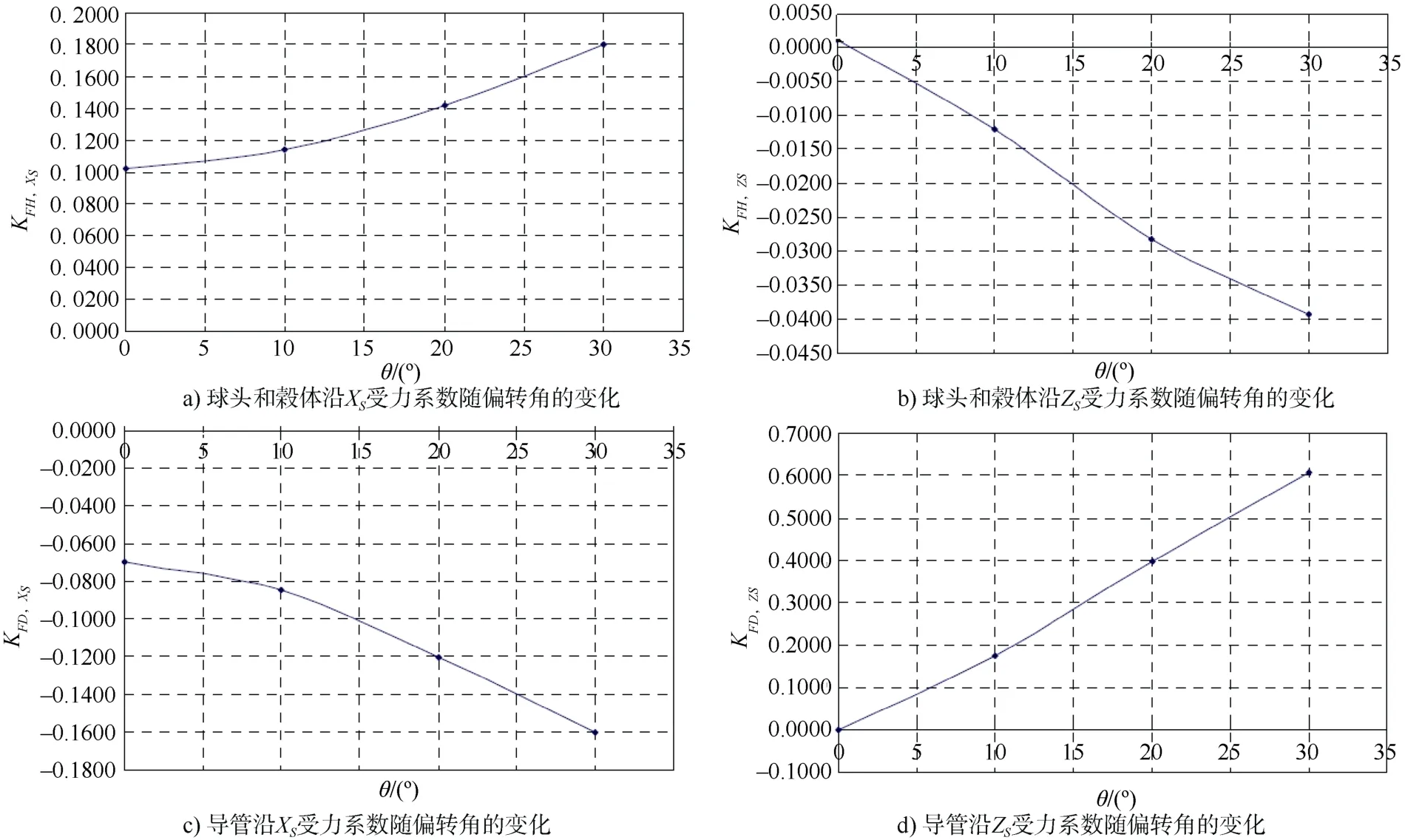

圖4 推進器各部件受力系數與偏轉角的關系Fig. 4 Relationship between force coefficient of each part of thruster and deflection angle
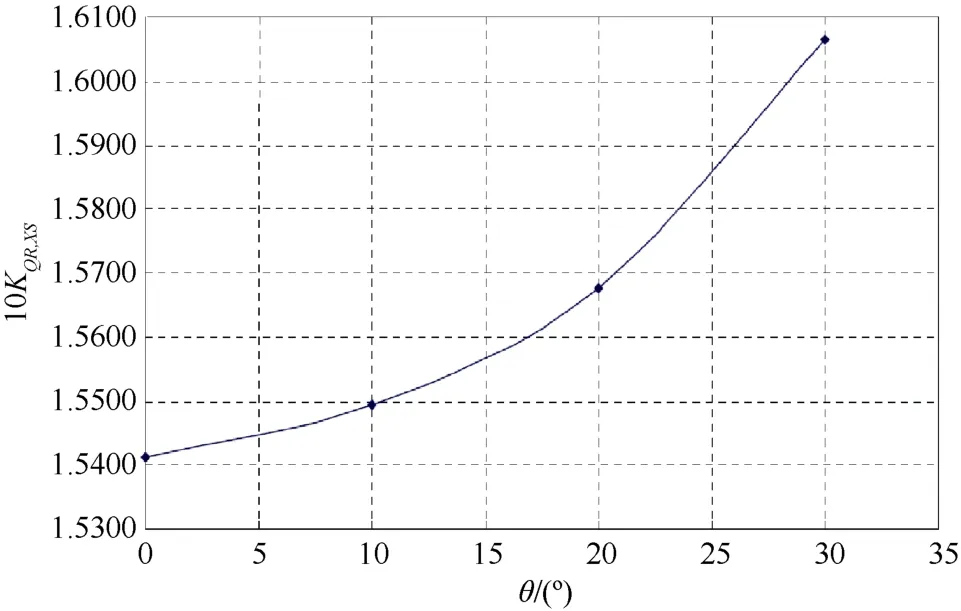
圖5 轉子扭矩系數與偏轉角的關系Fig. 5 Relationship between rotor torque coefficient and deflection angle
表1、圖4和圖5中的數據和曲線表明:
1)偏轉角對導管的受力系數影響比較大,30°偏轉角下導管沿XS方向的受力系數是0°直航狀態下的2.31倍;
2)隨著偏轉角的增加,轉子沿XS方向的受力系數和扭矩系數變化比較平穩,略有增加,與 0°直航狀態下相比,30°偏轉角下轉子沿XS方向的受力系數增加了3.4%,扭矩系數增加了4.2%;
3)隨著偏轉角的增加,整個推進單元沿XS方向的受力系數比較平穩,略有增加,與 0°直航狀態下相比,30°偏轉角下整個推進單元沿XS方向的受力系數增加了3.9%。
4)隨著偏轉角的增加,整個推進單元沿ZS方向的受力系數快速增加,當偏轉角達30°時,整個推進單元沿ZS方向的受力系數比XS方向的受力系數還要大,比值達到113.27%。這主要是因為隨著偏轉角的增加,導管沿ZS方向的受力系數急劇增加。
根據表1中給出的推進器在局部坐標系(O-XSYSZS)下的受力系數,計算出其在絕對坐標系(O-XYZ)下的受力系數,具體見表2。
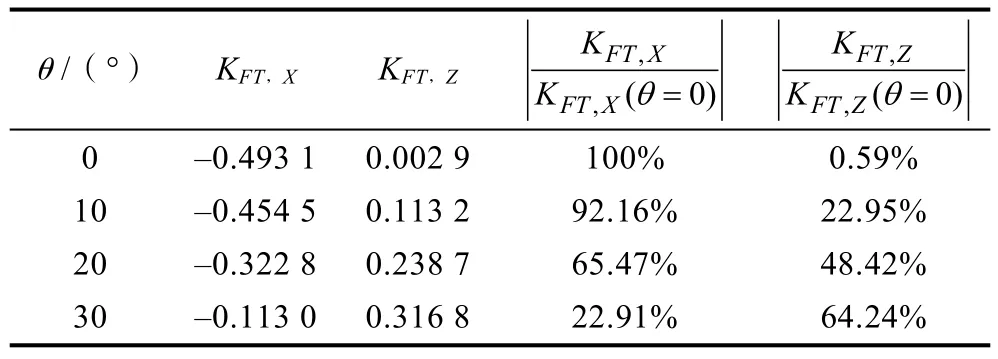
表2 推進器沿X方向和Z方向的受力系數Table 2 Force coefficient of thruster inXandZdirection
表2中,KFT,X為整個推進單元在絕對坐標系(O-XYZ)下,X方向的受力系數,KFT,X=KFT,Xs×cos(θ)+KFT,Zs×sin(θ);KFT,Z為整個推進單元在絕對坐標系(O-XYZ)下,Z方向的受力系數,KFT,Z=KFT,Xs×sin(θ)+KFT,Zs×cos(θ)。
從表 2中可以看出,隨著推進器偏轉角的增加,整個推進器沿航行器軸向方向的推力降低,30°偏轉角時,推進器沿航行器軸向方向的推力僅為0°直航狀態下的22.91%;隨著推進器偏轉角的增加,整個推進器沿Z方向的側向力快速上升,30°偏轉角時,推進器沿Z向方向的側向力達到 0°直航狀態推力的 64.24%,可為航行器的轉向機動提供充足的偏轉力矩。
圖6給出了推進器各偏轉角下,航行器尾部和推進器附近流場圖。
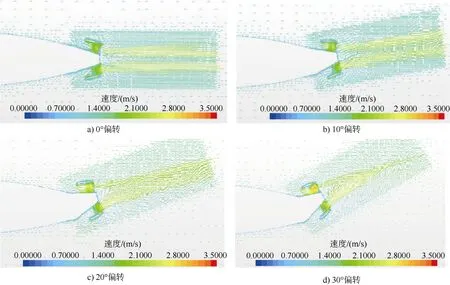
圖6 航行器尾部和推進器附近流場圖Fig. 6 Flow-field chart near the tail and thruster of vehicle
2 矢量推進水平回轉操縱性評估
基于AUV運動方程和水動力參數預報操縱特性,在AUV動力學方程[8-9]中有:F=T,My,z=Tz,y×ly,z,其中T為矢量推進器推力,ly,z為推進器水動力中心到重心的軸向距離。
計算水平回轉操縱參數:回轉直徑Ds/L、縱距Lm/L、橫距Si/L、戰術直徑Dt/L,見表3。

表3 水平回轉操縱性參數計算值Table 3 Calculated values of horizontal turning maneuverability parameters
3 矢量推進操縱試驗
基于矢量推進的航行操縱,既要控制推進器的轉速也要控制推進器的偏轉角,采用雙閉環的控制方法[10],將航向控制環或深度控制環同航速控制環設計成雙閉環,通過航向或深度偏角去控制 AUV航速,AUV轉向調整的同時依據偏角差的大小實時調節AUV轉向速度。
圖7所示為矢量推進器樣機水平、垂直通道30°偏轉角調試圖片,圖 8為基于矢量推進操控的航行器水下湖試航行照片。

圖7 水平、垂直30°偏轉Fig. 7 30° deflection in the horizontal and vertical direction
為了研究矢量推進器的操縱性能,在湖上開展了不同航速、不同矢量偏轉角的操縱性試驗,圖9為典型的3 kn航速下3組水下水平面回轉操縱的航跡坐標、推進器偏轉角、航向角、俯仰角、橫滾角參數。圖9(a)為航跡圖中矢量偏轉角10°、20°、30°對應的回轉直徑分別為5.153 m、2.778 m、1.968 m;20°、30°偏轉角下相比理論預報值增大約5.5%,考慮非線性和水面航行因素的影響,實航數據和理論預報值匹配度好;10°偏轉角下由于橫滾角變化較大,推力損失較多,造成回轉直徑較預報值增大較多;圖9(b)為推進器分別操縱10°、20°、30°偏轉角并保持水平回轉一周的操縱過程;圖9(c)為3個回轉周期航向角變化過程;圖9(d)為回轉過程中航行器俯仰角變化過程,10°偏轉角下俯仰角穩定變化范圍為0.5°左右,20°偏轉角下俯仰角穩定在1°左右,30°偏轉角下俯仰角穩定在2°左右;圖9(e)為操縱過程中橫滾角變化過程,隨著偏轉角的增大,橫滾角由3°震蕩范圍逐漸穩定在1°范圍內。

圖8 航行器矢量操縱性水下試驗Fig. 8 Vector maneuverability underwater test of the vehicle
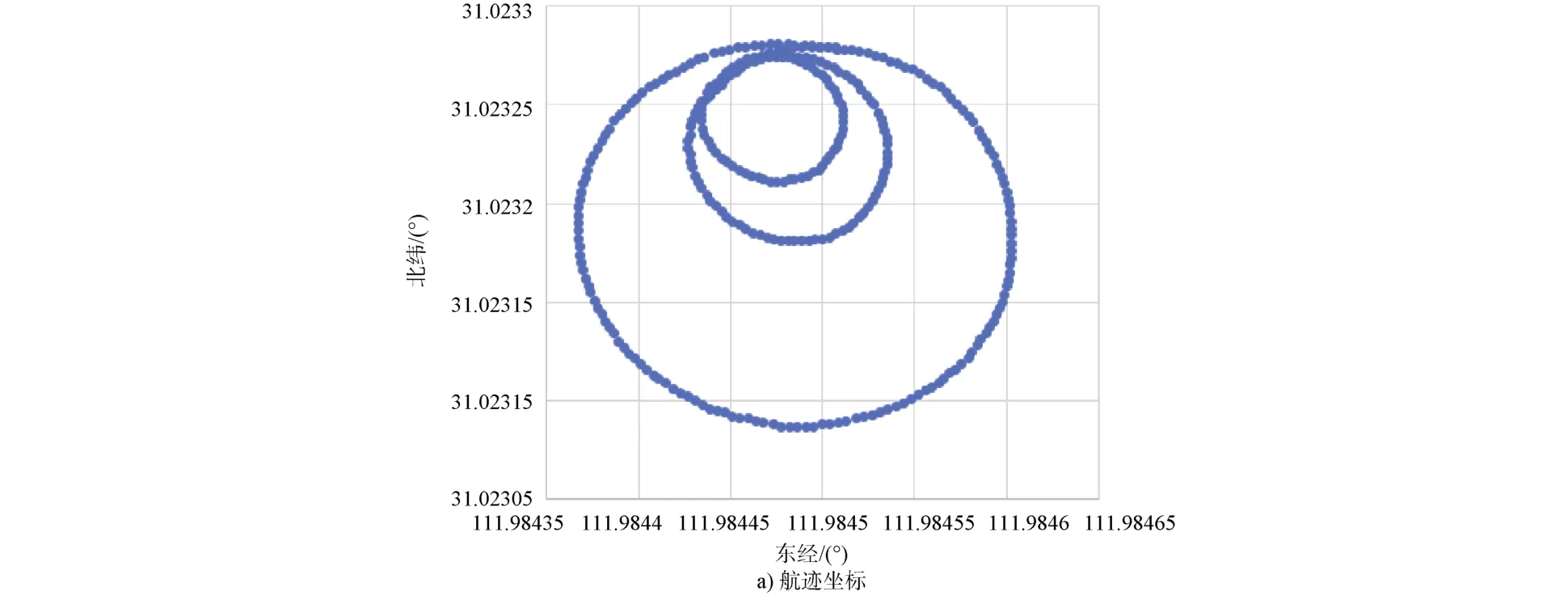
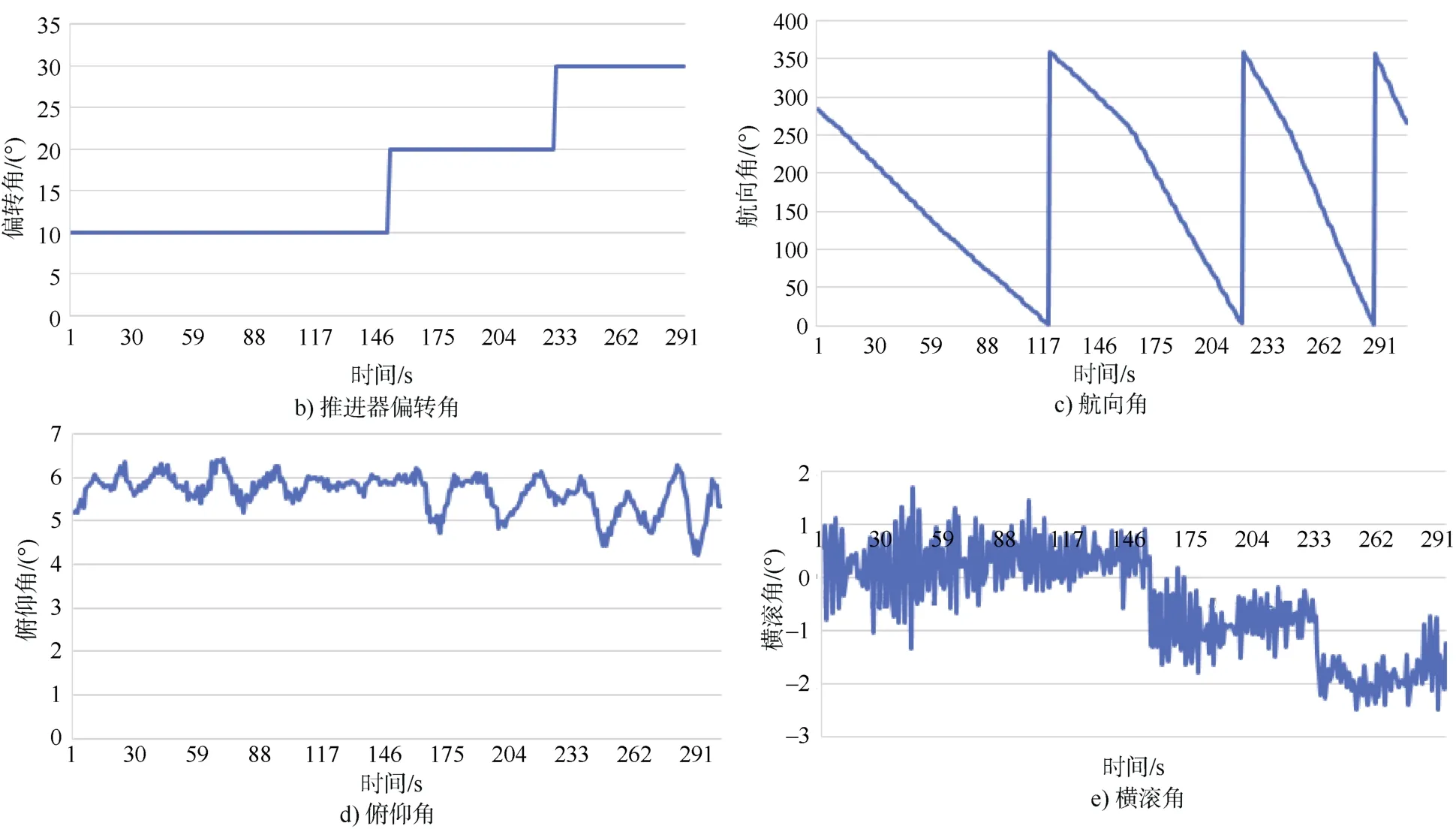
圖9 三組水平面回轉操縱參數Fig. 9 Three sets of horizontal turning maneuver parameters
4 結束語
本文計算了矢量推進器的水動力參數,并對矢量推進模式下航行器的操縱性進行了評估,開展了航行器矢量推進操縱性試驗。在3 kn典型航速、矢量偏轉角 30°操縱下,水平回轉直徑達到 0.8倍航行器艇長,驗證了矢量推進水平機動轉向的高操縱性能,同時也復核驗證了操縱性的理論計算。由于受湖試水域深度較淺等因素影響,沒有充分開展深度通道的變深操縱性試驗、Z型操縱試驗和空間螺旋操縱試驗等,后期將繼續開展相關的操縱性試驗項目。
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50