三分量磁傳感器定位模型建立及可觀測性分析
2020-08-29 12:10:14戴忠華周穗華
數(shù)字海洋與水下攻防 2020年4期
戴忠華,周穗華,單 珊
(海軍工程大學 兵器工程學院,湖北 武漢 430033)
0 引言
對運動鐵磁性目標的跟蹤定位,可利用磁傳感器測量的目標磁異常來進行。磁傳感器測量獲得目標隨位置改變的磁場強度信號。與有源跟蹤定位系統(tǒng)不同,在對磁性目標的跟蹤中不能直接測量得到目標與磁傳感器的位置信息,而只能從目標的磁場信息中通過提取技術間接獲得。
目前,應用于磁性目標的跟蹤定位中的磁傳感器,按照磁場測量的類型可以分為標量磁傳感器、矢量磁傳感器以及由矢量磁傳感器構成的磁梯度儀[1]。標量磁傳感器測量的是總場,大多用于運動平臺對靜止目標的定位中,如文獻[2]中分別建立了單個運動標量和2個運動標量的定位模型;文獻[3]中設計了標量磁傳感器定位陣列,利用陣列測量數(shù)據(jù)解決磁性目標的定位問題。矢量磁場傳感器大多用于靜止平臺對運動目標的定位,例如文獻[4]-[6]中使用多個矢量磁場傳感器,利用批量的測量數(shù)據(jù),基于磁性目標的等效數(shù)學模型,采用最小二乘進行求解;文獻[7]-[10]中同樣是使用 2個或者2個以上的矢量磁傳感器的觀測數(shù)據(jù),建立系統(tǒng)動態(tài)模型,通過跟蹤濾波算法進行目標的跟蹤。利用磁梯度儀對磁性目標的定位是近些年研究的熱點,因為該方法可以推導出定位封閉解形式,能夠較好地實現(xiàn)對目標的實時跟蹤定位,并且可用于運動平臺的目標跟蹤。無論是標量還是矢量傳感器,使用多個傳感器定位時,首先需要考慮的是磁傳感器的布置問題。在一定的傳感器分辨率下,2個矢量傳感器之間的距離必須滿足一定的范圍,并且,對于多個矢量傳感器,還需解決傳感器之間的對準問題,文獻[11]-[12]中分別討論了矢量陣分布和對準誤差對定位的影響。同時,在許多現(xiàn)實應用中,受測量平臺結構尺寸約束和定位系統(tǒng)低功耗要求,例如水雷引信系統(tǒng)、車輛磁檢測系統(tǒng)等,往往無法滿足多傳感布置,因此,需要研究單矢量傳感器的定位問題,這里的單個矢量傳感器是指單個三分量磁傳感器。文獻[13]中詳細討論了單標量磁傳感器的定位問題,證明了單標量磁傳感器定位模型是不可觀測的。對于單個三分量磁傳感器的定位問題,由于單個三分量傳感器無法克服運動平臺晃動引起的地磁干擾,單個三分量磁傳感器只適用于靜止平臺的定位問題,而靜止單個三分量磁傳感器的定位研究很少。
本文將對單個三分量磁傳感器的定位問題進行研究。建立單個三分量磁傳感器定位理論模型,借助可觀測性理論,通過考察Fisher信息矩陣的奇異性,對定位系統(tǒng)的可觀測性進行分析。之后,根據(jù)現(xiàn)實應用環(huán)境,推導系統(tǒng)可觀測的充分條件。
1 定位模型建立
1.1 單個三分量磁傳感器量測模型
統(tǒng)計信號處理中,傳感器量測模型為

式中:yk為傳感器輸出;xk為系統(tǒng)狀態(tài);ek為測量過程中的噪聲。
通常將磁性目標可以看成點磁偶極子,如圖1所示,以傳感器坐標系建立跟蹤參考坐標系,位于r處的磁性目標在傳感器處的磁場可由式(2)計算:

式中:μ0=4π×10-7H/m為真空磁導率;r=(x,y,z)T為目標相對于磁傳感器的位置矢量;m=(mx,my,mz)T為目標磁矩。
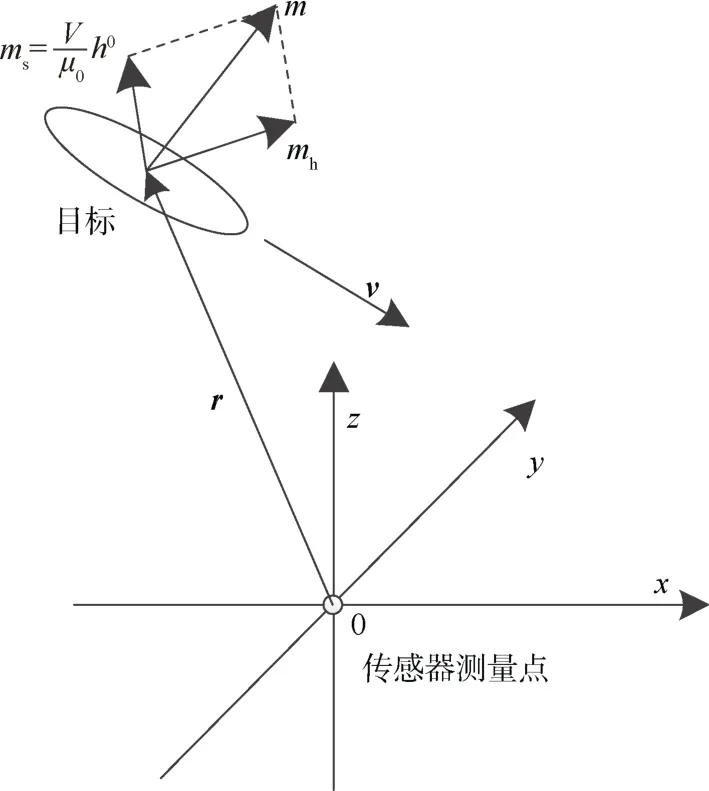
圖1 磁傳感器測量坐標Fig. 1 Magnetic sensor measuring coordinate
如圖 1所示,目標的磁矩參數(shù)m通常由固有磁矩和感應磁矩m組成。固有磁s矩是目標在建造期間形成的磁化,在目標的體坐標系中是一個不變的矢量;感應磁矩是目標在運動過程中受外部磁場磁化而產(chǎn)生,該部分磁矩的大小與外部磁場的大小相關,可表示為

式中:μ0為真空磁導率;h0為地磁場矢量;V為目標的磁化體積系數(shù)。
因此,目標磁矩m可表示為

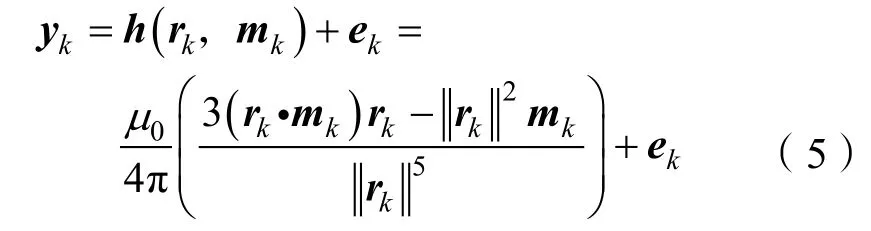
由式(1)-(4),可得目標運動過程中,k時刻時,位于參考坐標系原點處的單矢量磁傳感器的量測模型為
1.2 目標勻速運動狀態(tài)方程
由磁偶極子磁場計算公式(2)可知,目標的磁場強度隨著距離的3次方衰減,對磁性目標的跟蹤只能在目標經(jīng)過傳感器的有限范圍內進行。同時,對于跟蹤的對象通常為艦船、汽車等一些低動態(tài)運動磁性目標,在目標經(jīng)過傳感器的有限范圍內,可將目標運動視為勻速直線運動。因此,磁性目標跟蹤過程中,可將目標的運動簡化為勻速直線運動。
目標勻速運動模型可表示為
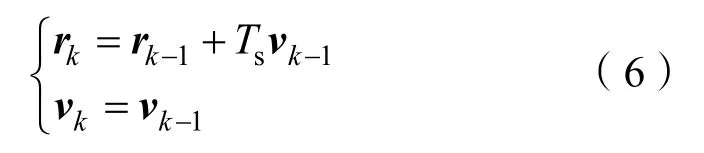
式中:Ts為采樣時間;是目標運動速度。
在目標勻速經(jīng)過傳感器過程中,假設目標在運動過程中不會發(fā)生自身的偏轉,即目標體坐標系的相對于參考坐標系的姿態(tài)角不變,即;且在目標經(jīng)過傳感器有限范圍內,地磁矢量可以看成不變量,即。因此,目標磁矩隨目標運動的轉移模型為

根據(jù)量測方程(5),定義k時刻目標狀態(tài)變量為
由式(6)-(8),可建立目標運動的狀態(tài)方程:

式中狀態(tài)轉移方程A為
則式(9)也可表示為
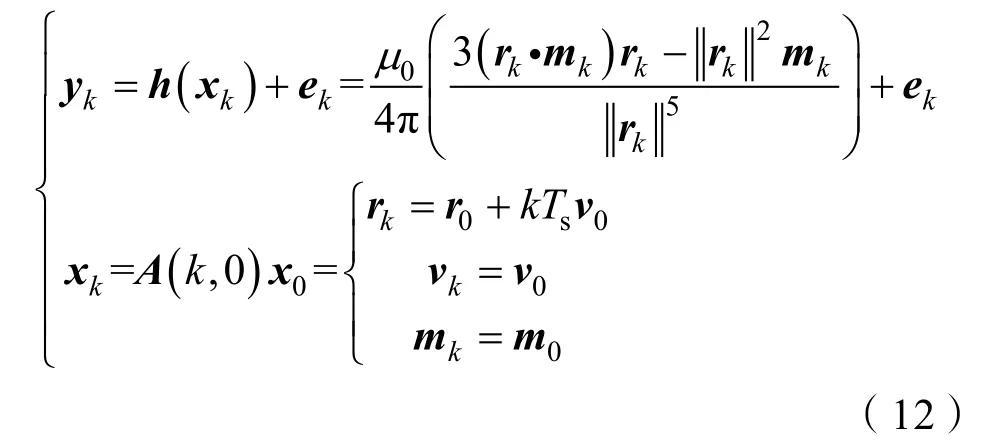
因此,單矢量量測模型(5)和狀態(tài)方程(11)可建立單矢量磁傳感器定位模型:
定位時,使用有限時間[t0,tk]內的批量量測數(shù)據(jù)[y0,y1,…,yk],建立k+1個方程,求解方程組便能估計目標初始狀態(tài)x0。
2 系統(tǒng)可觀測性分析
2.1 單個三軸矢量磁傳感器量測模型
系統(tǒng)可觀測即使用[t0,tk]上的觀測數(shù)據(jù)可以唯一確定系統(tǒng)的初值x0。對于任意給定時刻t0的系統(tǒng)狀態(tài)變量其可觀測性可以通過Fisher信息矩陣I(tn,t0)來衡量[14-15],定義如下:


由于系統(tǒng)狀態(tài)變量x0是根據(jù)在給定時間[t0,tn]上的y0:n求解出來的,而x0由式(8)可知為9維的,因此,給定時間[t0,tn]上必須要多于9個觀測量,構造多于9個的方程組,才有可能唯一求解出系統(tǒng)狀態(tài)x0,即n≥8。
根據(jù)式(12)可得:
根據(jù)ek~N(0,σ2)的獨立高斯分布,則聯(lián)合條件概率密度可以表示為

式中,K為標準化常數(shù);A(k,0)為
將式(16)代入式(13)求解條件均值,并利用ek的零均值特性,則式(13)化簡表示為
式中:hk(x0)為h(A(k,0 )x0)=h(xk);?hk(x0)為求雅克比矩陣,可以表示為
由式(5)-(7)可得:
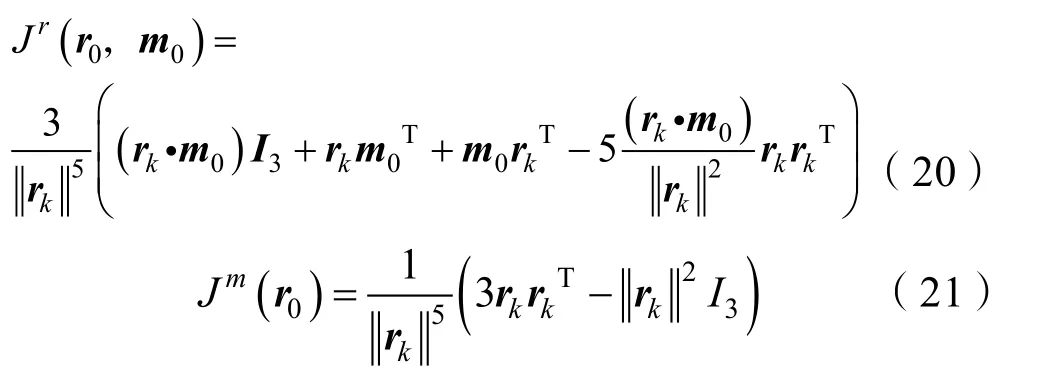
式中rk=r0+kTsv0。
系統(tǒng)的可觀測性隱含在信息矩陣之中。當Fisher信息矩陣I(tn,t0)矩陣滿秩時,系統(tǒng)是可觀測的,等價于對于任意的n≥8,時式(18)不存在0特征值。由此可知,系統(tǒng)可觀測的充分必要條件是:對于任意給定的 9×1維非零向量x,式(22)恒成立:

命題 1:存在 9×1維非零向量,使得,其中,,k1、k2、k3不全為0。

所以,當3k1=3k2=k3,式(25)成立,即式(22)成立;同樣,當 3k1=3k1=k3≠0,式(22)成立,即存在非零可使得即命題1得證。
由命題1可知,F(xiàn)isher信息矩陣I(tn,t0)存在非零的零特征值,信息矩陣是奇異的,系統(tǒng)是不可觀測的,即單個三分量磁傳感器定位模型是不可觀測的。
對于一個不可觀測點來說,其不可觀測的物理意義是由批量測量值無法唯一確定狀態(tài)參數(shù),也就是由同樣的輸出可獲得多個不同狀態(tài)值,即存在狀態(tài)的多解性。當真實狀態(tài)參數(shù)為根據(jù)輸出可獲得多個狀態(tài)參數(shù),除了真實狀態(tài)參數(shù),其他的狀態(tài)參數(shù)解由其信息矩陣的零特征向量擴張成,零特征向量可看成是狀態(tài)參數(shù)多解點在真實狀態(tài)點上的梯度。從以上推導可知,零特征值對應的特征向量為由該特征量可獲得多解空間。假設多解狀態(tài)參數(shù)為其中u為尺度參數(shù),則:
令u=λ(u)-1,則可得狀態(tài)參數(shù)為的多解空間為
將式(28)代入式(12)可知,輸出與參數(shù)u是無關的,即當真實參數(shù)的輸出y1:k與其不可觀測多解點的輸出是一樣的,也就是說由輸出y1:k對狀態(tài)參數(shù)的估計可以是真實狀態(tài)也可能是造成上述系統(tǒng)不可觀測的原因是系統(tǒng)狀態(tài)參數(shù)的估計不是由傳感器測量直接獲得,而是利用傳感器測量間接完成的,從而使得系統(tǒng)狀態(tài)出現(xiàn)多解。由式(27)給出的多解條件,其物理解釋為小目標(磁矩m較小)、慢運動、近距離和大目標(磁矩m較大)、快運動、大距離在傳感器處產(chǎn)生的磁場是一樣的。
2.2 部分參數(shù)先驗已知下的單個靜止三分量磁傳感器模型可觀測性
在磁性目標跟蹤應用中,磁性目標跟蹤的對象通常為汽車、水面艦艇、潛艇等。這些應用場景中狀態(tài)參數(shù)中的部分參數(shù)是先驗已知的,例如,汽車跟蹤過程中位置參數(shù)的正橫已知;水面艦艇跟蹤過程中,置于水底的傳感器測量深度已知。下面,在狀態(tài)參數(shù)中部分已知的條件下,分析系統(tǒng)的可觀測性。
2.2.1 位置參數(shù)r0中y0已知時系統(tǒng)的可觀測性
在汽車的跟蹤過程中時,磁傳感器通常是布放在道路的兩側。對于汽車運動模型中,傳感器相對于道路的距離是已知的,假若以傳感器矢量三軸方向建立跟蹤坐標系,則狀態(tài)參數(shù)x0的位置參數(shù)r0中部分是已知的,即r0=(x0,y0,z0)T中的y0已知。下面將對y0已知時,單矢量磁傳感器定位模型的可觀測性進行分析。
由于狀態(tài)估計解中已知y0,即r中的y=y0,又r=ur0,所以,y=y0=uy0,求解得u=1。由上可知,對于真實解r0=(x0,y0,z0)T的多解點x(u)=x(1)=x0,多解點與真實解重合,不存在其他解,即在y0已知的條件下,單矢量傳感器模型是可觀測的。
2.2.2 位置參數(shù)r0中z0已知時系統(tǒng)的可觀測性
對于水面艦艇的磁定位中,磁測系統(tǒng)通常能夠已知自身相對于水面的深度。假若以傳感器矢量三軸方向建立跟蹤坐標系,則狀態(tài)參數(shù)x0的位置參數(shù)r0中部分是已知的,即r0=(x0,y0,z0)T中的z0已知,且z0≠0。下面,將對z0已知時,單矢量磁傳感器定位模型的可觀測性進行分析。
同理,由 3.2.1節(jié)的證明步驟,可得x(u)=x(1)=x0,多解點與真實解重合,不存在其他解,即在z0已知的條件下,單矢量傳感器模型是可觀測的。對于靜止放置于水底的磁傳感器,對水面艦艇的跟蹤,深度已知z0,狀態(tài)參數(shù)的估計不會存在多解性,單矢量傳感器模型是可觀測的。
3 仿真驗證
3.1 部分參數(shù)先驗已知下的單個靜止三分量磁傳感器模型可觀測性
由第2節(jié)可知,單矢量磁傳感器定位模型是不可觀測的,對于初值狀態(tài)的估計存在多解,即利用相同的觀測值對系統(tǒng)狀態(tài)估計,會出現(xiàn)多解,或者說當由 2個不同初始狀態(tài)值生成的觀測數(shù)據(jù)是一樣的,只要初始狀態(tài)值滿足式(28)。
設置初始狀態(tài)值x0如表 1所示,采樣周期Ts=1 s,采樣點數(shù)N=21,生成觀測數(shù)據(jù)。再根據(jù)式(28),令u=2,則。由x(u)作為設置初始狀態(tài)值,同樣的采樣周期和采樣點數(shù),生成觀測數(shù)據(jù)。如圖2所示,為x0和x(2)生成的觀測數(shù)據(jù)點,從圖中可知,2個初始狀態(tài)值生成的觀測數(shù)據(jù)是相同的,即當利用該觀測值估計初始狀態(tài)值時,無法唯一估計狀態(tài)參數(shù)x0,會出現(xiàn)多解,即系統(tǒng)不可觀測。
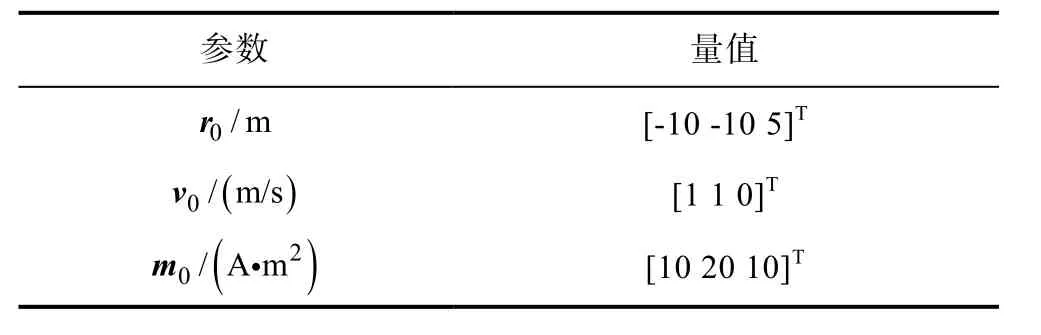
表1 初始狀態(tài)參數(shù)設置Table 1 Initial state parameter setting
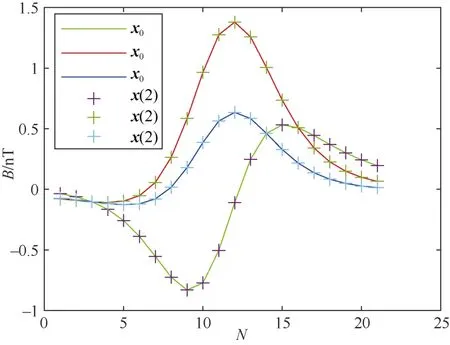
圖2 x0和x(2)生成的觀測數(shù)據(jù)Fig. 2 Observation data generated byx0and x(2)
為進一步驗證多解性,由式(12)可利用上述的觀測數(shù)據(jù)進行系統(tǒng)狀態(tài)x0估計,這里可使用加權最小二乘估計:
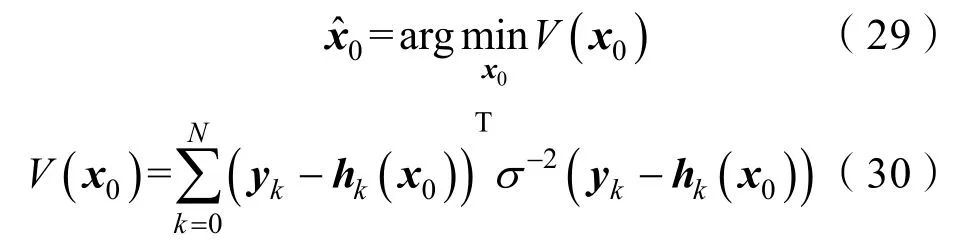
式中,σ2為測量系統(tǒng)的噪聲方差。這里,為了驗證系統(tǒng)的不可觀測性,暫時認為測量系統(tǒng)不存在噪聲,則式(30)改寫為

式(29)可使用尋優(yōu)算法求解。目前,磁性目標定位中使用較多的是文獻[4]中的遺傳算法。遺傳算法具有較好的全局最優(yōu),這里將使用該方法進行求解。
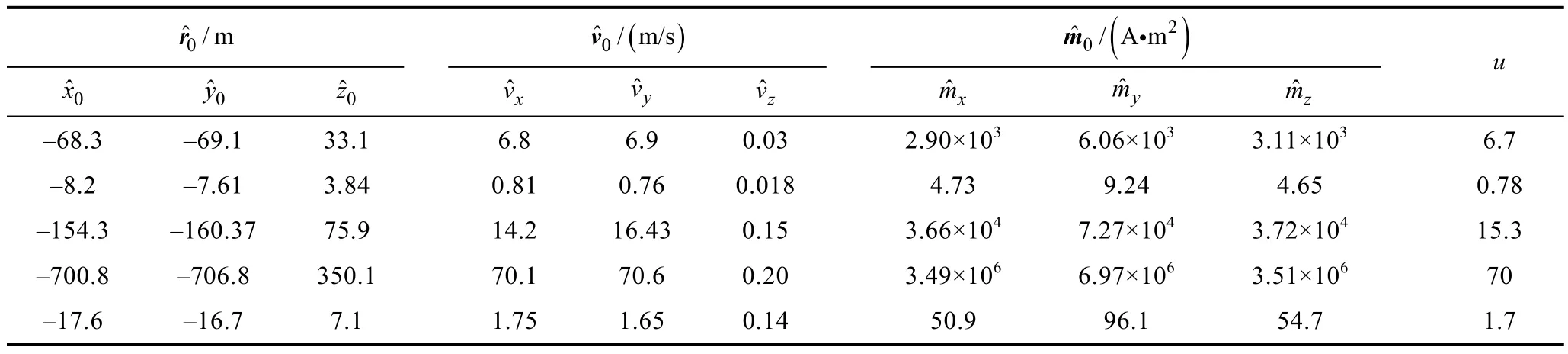
表2 單個三分量磁傳感器定位結果Table 2 Positioning results of a single three-component magnetic sensor
3.2 部分先驗已知時系統(tǒng)可觀測性驗證
由 2.2.2節(jié)的討論可知,在部分先驗(參數(shù)y0或者z0)已知的條件下,系統(tǒng)是可觀測的。現(xiàn)以水面艦艇目標定位為例,按照3.1節(jié)中表1的初始數(shù)據(jù)生成的結果,估計過程中同樣利用式(29)-(31)進行最小二乘估計,在求解式(29)時,使用遺傳算法進行。得到的估計結果如表3所示,圖3為公式(31)的值隨遺傳算法迭代的變化情況。
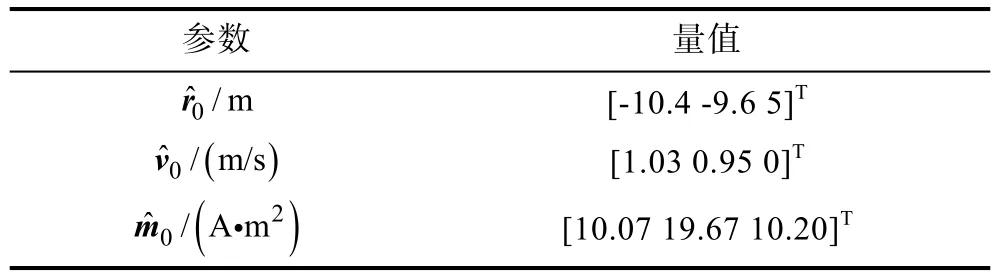
表3 部分先驗已知時的估計結果Table 3 Estimated results with partial priors known
從圖 3的結果可以看到,隨著迭代次數(shù)的增加,V(x0)的值逐漸收斂,越來越小,說明遺傳算法求解的值是在不斷向真實值靠近的。從表3的估計結果可知,對比真實狀態(tài)值(如表1所示),估計值和真實x0的偏差很小,幾乎相等,表明在先驗已知的條件下,單個三分量磁傳感器定位模型是可觀測的。
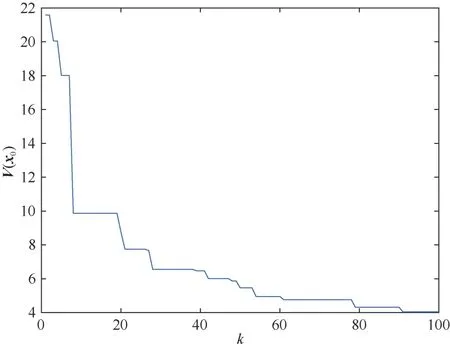
圖3 V(x0)隨迭代次數(shù)的變化情況Fig. 3 V(x0)’s changes with the number of iterations
4 結束語
本文主要對單個三分量磁傳感器的定位模型建立及系統(tǒng)可觀測性 2個重要的理論問題進行了研究,通過推導得到了單個三分量磁傳感器的定位模型。對于系統(tǒng)可觀測性問題,通過考察 Fisher信息矩陣的奇異性,證明了單個三分量磁傳感器的定位系統(tǒng)的不可觀測性;根據(jù)現(xiàn)實應用情景,推導了在部分先驗條件已知下的可觀測性。最后,通過仿真試驗驗證了本文結論的正確性:1)單矢量傳感器定位模型是不可觀測;2)在部分先驗已知的條件下,例如已知位置參數(shù)中的部分量,系統(tǒng)是可觀測的。
雖然在理論上建立了單個三分量磁傳感器定位模型并推導了系統(tǒng)可觀測性,但這只是解決了單矢量磁傳感器是否可觀測的問題。從本文的仿真試驗中可以看出,利用遺傳算法對位置參數(shù)進行估計時,盡管剔除了觀測噪聲,但估計結果都會存在一定程度的偏差。這是由于遺傳算法并不能保證每次求解都能準確得到高維、強非線性函數(shù)的最優(yōu)解。因此,需要研究針對本定位模型的適用的求解算法。本文提出的定位模型稍作修改后,便可應用跟蹤濾波算法進行磁性目標的實時跟蹤。利用濾波算法跟蹤,可以在一定程度上避免觀測噪聲的影響,但是需要考慮觀測模型的高維非線性問題。要對一般的非線性濾波算法進行改進,才能應用到磁性目標跟蹤上。接下來,也將著力研究適用于單個三分量磁性目標實時跟蹤的濾波算法。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19