一種無人艇自適應無線通信系統的設計應用
2020-08-29 12:10:16盧筑飛陳天利
數字海洋與水下攻防 2020年4期
盧筑飛,陳天利,王 超
(1.中國船舶重工集團有限公司第七一〇研究所,湖北 宜昌 443003;2.北京衛星導航中心,北京 100094)
0 引言
無人艇(USV)是一種無人操作的水面艦艇,與無人機、無人車同屬于無人系統平臺。無人艇由水面艦船或岸基布放回收,以半自主或全自主方式在水面航行,執行危險以及不適于有人船只作業的任務。為實現無人化、自主化控制,無人艇需配備無線通信系統,以實現無人艇與母艇(主控端)之間信息的實時交互。目前,國內外無人艇技術已經取得大的進步,在軍用和民用領域,各型無人艇獲得廣泛應用[1]。在工程設計中,無線通信系統作為無人艇的重要構成,需根據無人艇應用場景配備合適的無線通信設備,制定有效的通信控制策略,確保無人艇作業時無線通信鏈路連續穩定。
1 無線通信技術發展現狀
無線通信技術的發展分5個階段:20-50年代初,無線通信技術最初在軍用領域得到應用,但傳輸速率有限,其應用發展受到束縛;50-60年代,隨著半導體技術的發展,無線通信技術開始應用到移動領域;70-80年代,隨著通訊技術的進一步發展,第一代通訊系統誕生;80-90年代,第二代通訊系統誕生,電信系統得到有效發展;90年代后期至今,陸續推出3G、4G、5G移動通信技術,通信系統得到廣泛應用,技術上不斷升級換代。
按照傳輸距離,無線通信技術又可分為近距離通信和遠距離通信技術。近距離通信技術主要有Zigbee、藍牙、WiFi、NFC、UWB 等;遠距離通信技術主要有微波通信、衛星通信、4G/5G通信、紅外光通信、激光通信等。
在實際作業過程中,無人艇通常距離母艇較遠且處于不斷運動中。綜合各類無線通信技術的特點,一般選用微波通信、衛星通信、4G/5G通信構建無人艇無線通信系統。其中,微波通信抗干擾能力強,適合大量的數據傳輸;衛星通信頻帶很寬,能提供高質量的信息;4G/5G無線覆蓋面積大,可適用于不同用戶[2-4]。
2 無人艇基本構成
無人艇主要由艇體、航行控制系統、動力推進系統、導航定位系統、環境感知系統、無線通信系統及供電系統組成,如圖1所示。
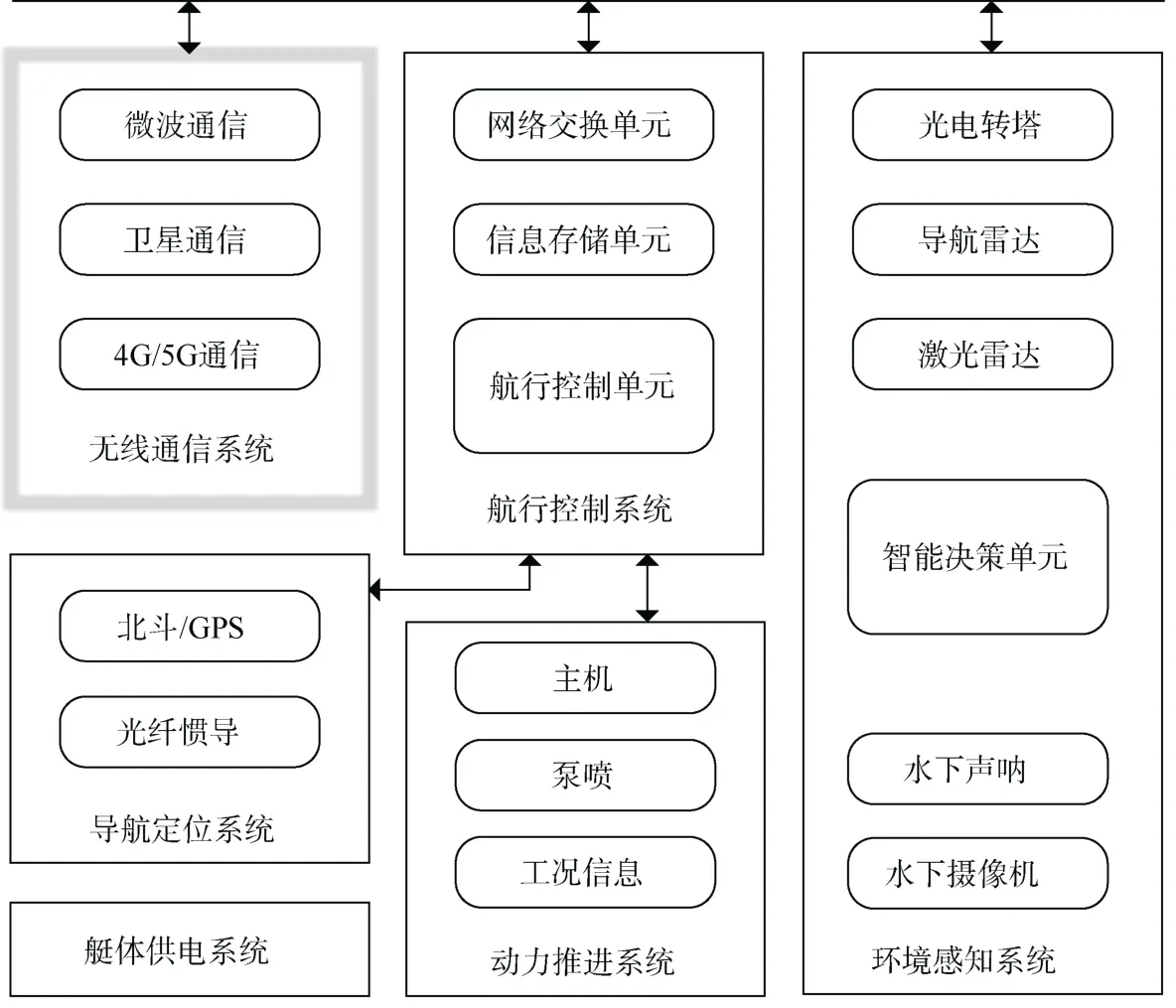
圖1 無人艇基本構成Fig. 1 Basic constitution of USV
航行控制系統主要實現無人艇的航行控制;動力推進系統主要為無人艇匹配主機、噴泵等動力裝置;導航定位系統主要為無人艇提供精確的位置、姿態和航向信息;環境感知系統主要實現無人艇周圍環境的探測和重構,為無人艇自主航行提供決策支持;無線通信系統主要為母艇(主控端)與無人艇之間,以及多艇之間提供無線通信鏈路,實現平臺間信息的實時交互。無線通信系統主要由微波通信、衛星通信和4G/5G通信設備構成。
3 無線通信系統設計
在目前已成熟使用的無線通信設備中,適用于無人艇無線通信的設備主要有寬帶無線電臺、窄帶無線電臺、衛星通信終端、岸基 4G/5G通信設備等。其中,寬帶無線電臺主要用于視距范圍Mb級數據的實時傳輸,如視頻、聲吶等數據的傳輸;窄帶無線電臺主要用于遠距離 Kb級數據的實時傳輸,如語音、指令、工況等數據的傳輸;衛星通信終端廣泛用于海上應急通信,具有覆蓋區域大,通信距離遠,不受地理條件限制的優點,傳輸速率從Byte級到Kb級。因衛星通信資源有限,一般用于應急狀態下重要指令、工況和安全信息的傳輸;岸基 4G/5G通信范圍受限于通信基站,一般用于近岸作業時無人艇信息的傳輸。在海上使用時,無人艇一般搭載寬帶無線電臺、窄帶無線電臺和衛星通信終端,組成無線通信系統,如圖2所示。
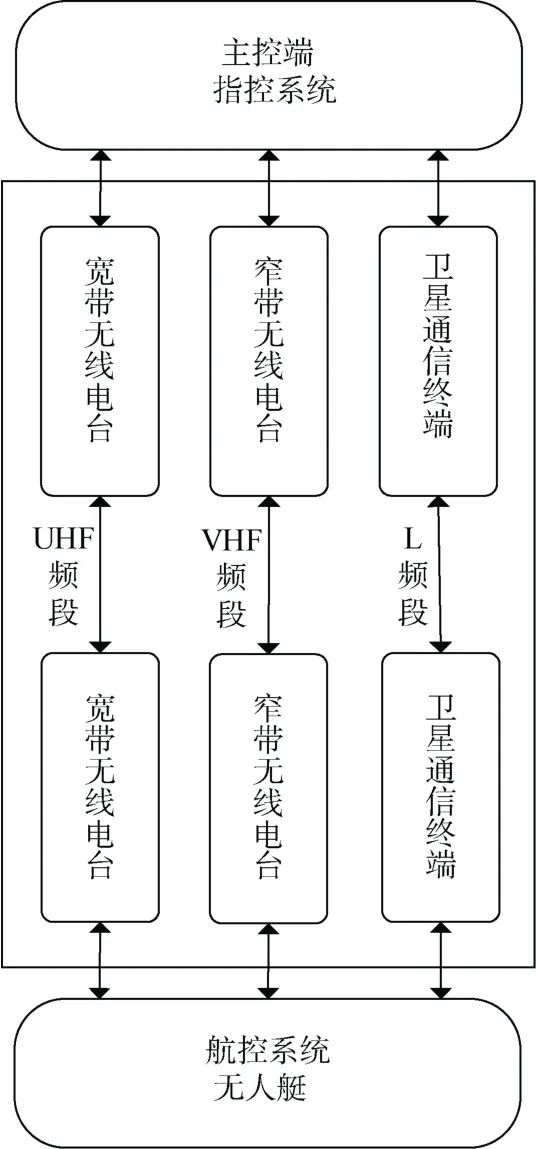
圖2 無人艇無線通信系統Fig.2 Wireless communication system of USV
3.1 寬帶無線電臺[1,5]
寬帶無線電臺一般工作在UHF頻段,在一定的視距范圍內可提供Mb級的數據帶寬,實現主控端與無人艇之間視頻圖像、聲吶圖像、控制指令、工況等信息的傳輸。
1)通信距離的影響因素。
無線電波在海面傳播時,視距范圍內主要通過空氣中的直達波和海面的反射波進行傳播。在視距范圍外的地球陰影區域,無線電波需考慮地球球面形成的遮擋造成的繞射損耗。因此,無線通信距離主要取決于天線的增益和架高、電臺的發射功率和接收靈敏度,以及傳播途徑上的環境影響因素,如海浪、水面反射、遮擋等。
2)海上通信視距計算。
在電臺的各種指標均足夠滿足要求(即無線發射功率足夠大,接收機靈敏度足夠高)的情況下,僅考慮地球的曲率半徑、發射天線和接收天線的高度時,可按式(1)計算通信的理論距離,即通信兩端天線之間的視距。

式中:R為地球的曲率半徑;Ht和Hr分別為發射和接收天線離水平面的實際高度。
3)最大傳輸距離工程估算。
在實際工程設計中,無線通信距離需考慮無線電波在自由空間傳播時存在的路徑損耗,此種損耗為輻射能量擴散引起的損耗,并非受到阻擋、反射、折射、繞射、吸收等原因而產生的損耗,工程上此類損耗可采用式(2)計算。

式中:Lp為路徑損耗,dB·m;d為傳播距離,km;f為發射頻率,MHz。在選定電臺的情況下,可根據發射功率、接收靈敏度、發射頻率計算允許的路徑損耗,再結合公式(1)推算電臺理論通信距離。
在考慮大氣折射對無線電磁波傳播影響的情況下,寬帶無線電臺的傳輸極限距離可以采用式(3)計算。

式中:d為傳輸距離,km;R為地球半徑,km;Ht和Hr分別為發射和接收天線的高度,m。實際情況中,因無線電波在傳播途徑上存在繞射損耗和多徑反射衰落,最大傳輸距離約為傳輸極限距離的70%。
3.2 窄帶無線電臺
窄帶無線電臺工作于VHF頻段,傳輸速率一般為Kb級。其具有穩定性好、建立迅速、機動靈活等優點,主要用于較遠距離時控制指令、工況、語音等信息傳輸。
VHF頻段屬于超短波,超短波在空氣中傳播時具有一定的繞射和穿透能力,相比UHF頻段的寬帶無線電臺,在同樣環境條件下窄帶無線電臺通信距離更遠。因此,工程估算時,可以按3.1節中的公式(3)進行最大傳輸距離的計算。
3.3 衛星通信設備
衛星通信作為高速寬帶通信和低速窄帶通信方式的補充,可以不受地理環境、氣候條件和時間的限制,在通信衛星波束覆蓋區域內,均可實現遠距離的數據通信。同時,衛星通信具有通信質量好、系統可靠性高、安全性強的特點。其作為應急通信手段,可用于應急狀態下重要指令、工況及安全信息的傳輸。目前國內衛星通信設備主要有北斗通信終端和天通通信終端。其中,北斗通信速率較慢,一般為數十字節每分鐘;天通通信速率較快,最大可達百Kb級[6]。
4 自適應無線通信系統
為滿足無人艇在不同應用場景作業的需求,大部分情況下無人艇無線通信系統應具備接入寬帶無線通信、窄帶無線通信、衛星通信等通信設備的能力。本文提出一種自適應無線通信系統的設計方案,采用智能監控模塊將3種通信設備進行融合。自適應無線通信系統根據無人艇和通信設備的狀態變化自主切換無線通信網絡,保持主控端與無人艇間無線網絡的連續穩定鏈接。自適應無線通信系統組成如圖3所示。
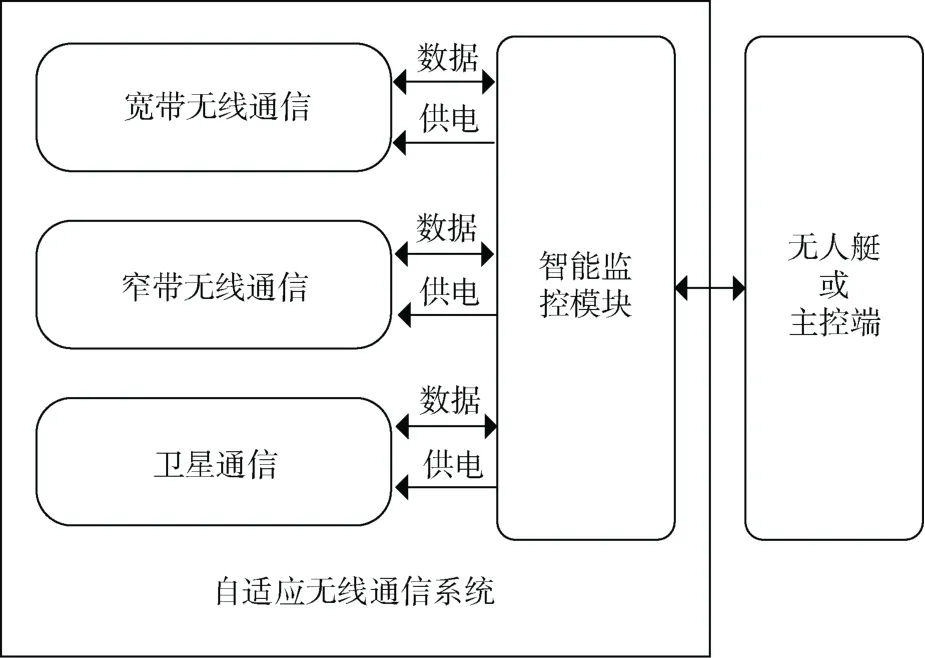
圖3 自適應無線通信系統Fig. 3 Adaptive wireless communication system
自適應無線通信系統通過智能監控模塊將寬帶無線通信、窄帶無線通信和衛星通信設備接入無人艇或主控端。智能監控模塊作為自適應無線通信系統的控制核心,為無線通信設備提供標準通信接口,具備接入多種通信設備的能力,并對各通信設備的工作狀態進行實時監控。該模塊按用戶定義機制自主切換通信鏈路,保證無人艇作業時與主控端之間的無線通信鏈路連續不中斷,重要信息可實時交互。
4.1 智能監控模塊組成
智能監控模塊主要由微控制器、狀態監控、數據交換單元組成,如圖4所示。智能監控模塊的數據交換單元為各無線通信設備提供標準通信接口,狀態檢測單元對各個端口的通信狀態進行監測,微控制器根據檢測結果決定接入無人艇或主控端的無線通信設備,自主建立穩定的無線通信鏈路。
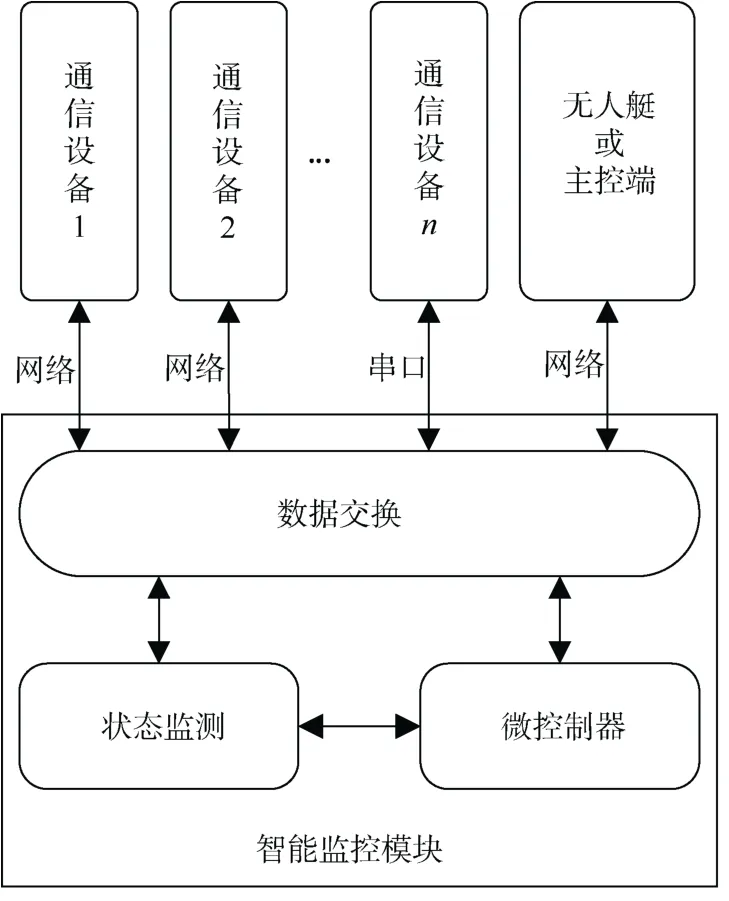
圖4 智能監控模塊Fig. 4 Intelligent monitoring module
4.2 無線通信鏈路切換
在智能監控模塊中,采用預切換機制實現無線通信鏈路之間切換。在當前無線鏈路未斷開之前,預接入系統的無線通信設備即開始接入無人艇或主控端網絡的操作。在預切換機制下,狀態監測單元檢測到當前無線網絡的鏈路質量低于預切換閥值時,立即向微控制器單元發送切換事件消息,微控制器單元接收到事件消息后激活預接入無線通信設備的端口并開始連接無人艇或主控端網絡,在當前無線網絡鏈路斷開之前完成無線鏈路的切換。預切換機制可有效減少切換過程中的數據丟包。無線通信鏈路預切換機制的具體實現步驟如圖5所示[7-8]。
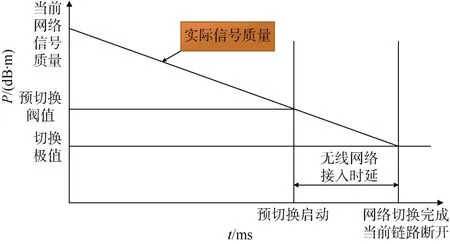
圖5 無線通信鏈路預切換機制Fig. 5 Wireless communication handover mechanism
5 系統測試
在無人艇設計時,按設計要求選擇適合的寬帶無線電臺、窄帶無線電臺和衛通設備接入智能監控模塊,組成無人艇自適應無線通信系統。
測試場景:試驗時,主控端自適應無線通信系統放置在岸邊,主控端和無人艇端的天線按設計要求架設到指定高度。同時,按用戶定義策略對兩端的自適應無線通信系統進行配置。首先進行近距離通信測試,系統工作正常后,無人艇由近及遠航行,開展通信系統的拉距測試。在近距離時,主控端可接收到寬帶無線電臺傳輸的圖像、指令、工況等信息;當試驗船超出寬帶無線電臺通信距離時,系統自主切換到窄帶通信鏈路,主控端接收到窄帶無線電臺傳輸的指令、工況信息;當試驗船超出窄帶無線電臺通信距離后,系統自主切換到衛星通信鏈路,主控端接收到衛通傳輸的應急指令和工況信息。測試狀態如圖6所示。
試驗結果表明,自適應無線通信系統能夠根據寬帶無線電臺、窄帶無線電臺、衛星通信設備以及無人艇的工作狀態進行通信鏈路的自主切換。試驗中,無線通信鏈路可按用戶定義自主切換,切換過程中通信信息可連續實時交互。
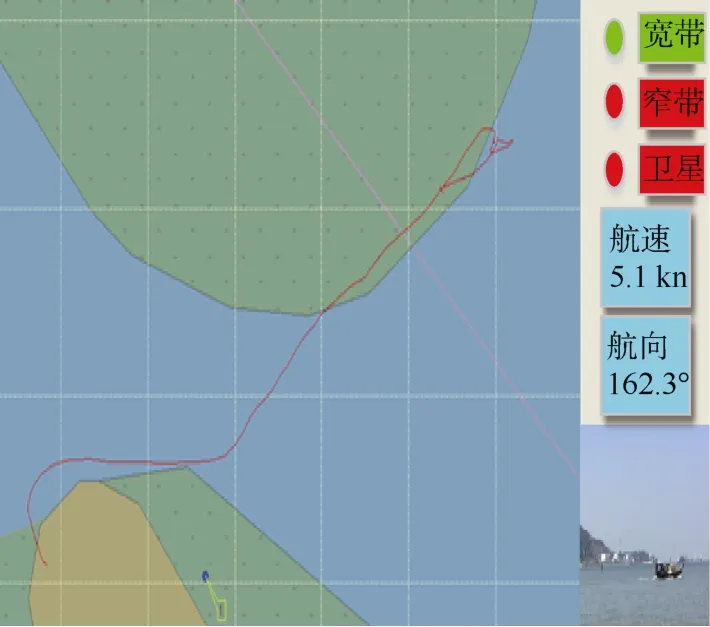
圖6 自適應無線通信系統測試結果Fig. 6 Test result of adaptive wireless communication system
6 結束語
本文從無線通信技術的發展現狀出發,分析了當前常用無線通信技術的特點,并結合無人艇的實際應用場景,構建了基于微波通信、衛星通信等通信設備的無人艇無線通信系統。本文對各通信設備的適用場景、通信距離計算方法進行了詳細介紹,并提出一種自適應無線通信系統,實現不同無線通信設備之間通信鏈路的自主切換,確保無人艇通信鏈路連續穩定。該系統采用標準通信接口,具有良好的擴展性,可滿足無人艇在多種應用場景中對無線通信系統的需求。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(2017年9期)2017-09-26 03:41:45
工業設計(2016年12期)2016-04-16 02:52:00