基于狀態和屬性的多目標聯合關聯算法
2020-08-31 01:39:48孫寒濤
應用科技 2020年3期
孫寒濤
中國人民解放軍92493 部隊,遼寧 葫蘆島 125000
由于被動聲吶探測隱蔽性好,被動定位技術已成為水下目標定位的重要技術手段。對于一個被動測向交叉定位系統,單一被動站不能很好地完成定位任務,通常聯合多個被動站對目標進行聯合定位。由于每個被動站之間存在一定的距離,其測量得到的目標輻射信號也不完全相同,有一定的差異。隨著目標和觀測站數目的增加,多條測向線兩兩相交,使虛假定位點的數目急劇增加。如何快速排除虛假點是目標方位數據關聯的難點[1]。
本文把目標的信息分為2 類,即表示目標狀態的方位信息和表示目標特征的物理信息,提出一種目標數據聯合關聯方法。該方法主要包括2 個核心內容:一是輻射源方位數據關聯,建立粗關聯和細關聯統計量,從多個不確定的角度集合中篩選出來自于同一個目標的信息[2];二是目標特征數據關聯,利用目標屬性對不同的目標進行區分。本文研究了利用自適應熵權灰色關聯度和聚類分析對多條目標報文進行分類的方法,可用于實現多目標關聯任務,把針對同一目標的方位角組合,提供給目標定位解算。
1 方位數據關聯
1.1 方位粗關聯
以3 個聲吶陣測向交叉定位為例,假設目標與聲吶陣位于平面直角坐標系內。三陣測向交叉定位示意圖如圖1 所示。圖1 中3 個聲吶陣分別位 于 si、 sj以 及 sk點 。坐 標 分 別 為 (xi,yi), (xj,yj)以 及(xk,yk)。 圖中li、 lj、 lk分別為各個聲吶陣測量同一目標的3 條測向線。對應的方位角測量值分別為 θi、θj和 θk。由于受到環境噪聲影響,角度測量存在偏差,3 條測向線不能完全交于一點。以測向線 li為基準、 lj與 其交于 P 點 , lk與其交于 Q 點 。圖中 A點表示實際目標位置,3 條虛線表示各個陣相對于目標的真實測向線。 θiJ是聲吶陣 si與 sj的基線和正北方向的夾角, θik是聲吶陣 si與 sk的基線和正北方向的夾角。假設各個聲吶陣的測量相互獨立,角度測量誤差均服從均值為零的高斯分布[3]。
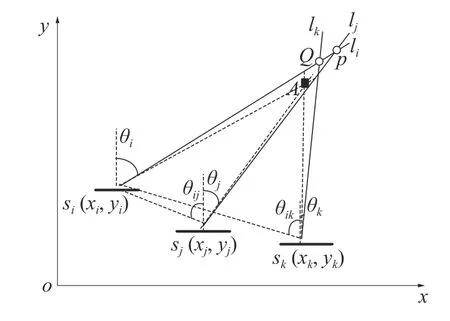
圖1 三陣測向交叉定位示意
根據正弦定理可知點 P 與 si的距離為

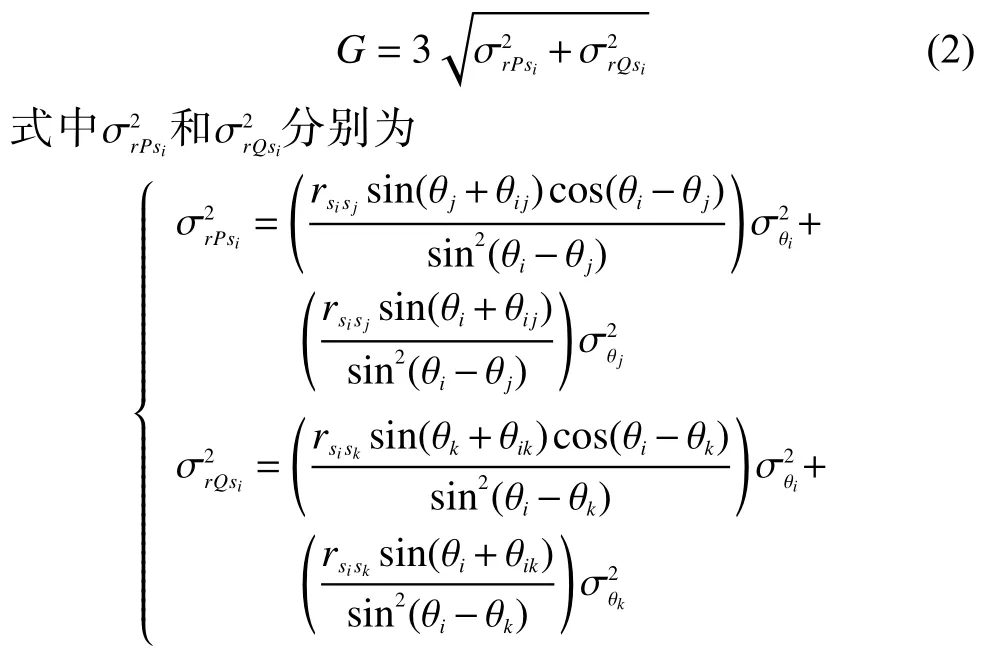
式 中: rsisj為 聲 吶 陣 si與 sj間 的 基 線 距 離。由 式(1)可知, rPsi是以 θi、 θj作為參數的函數。根據泰勒級數對 rPsi進行展開,并且取一階偏導,近似計算得到 rPsi的誤差方差的數學表達式為
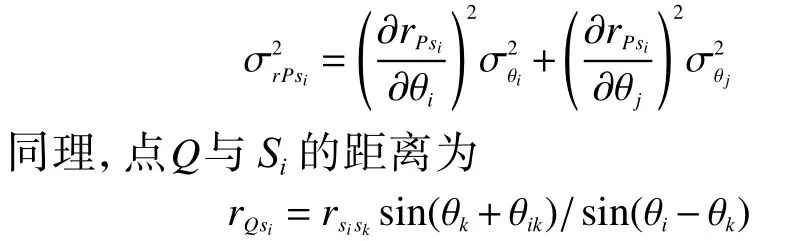
聲吶陣Si與Sk間的基線距離用 rsisk表示。rQsi誤差方差近似表達式為標,則滿足DPQ<3所以令DPQ作為檢
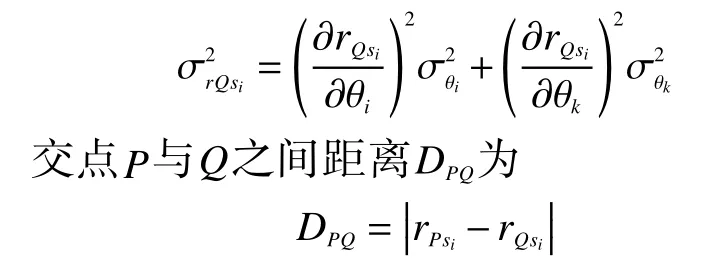
根據3-σ準則,如果3條測向線均針對同一目驗統計量,令方位粗關聯的判決門限為 G,數學表達式如下[4]
以3 個聲吶陣測量 M個目標為例,假設每個聲吶陣都能檢測到目標,且每個聲吶陣的單條測向線只針對一個目標[5]。圖2 為三陣測向交叉虛假點排除示意圖。
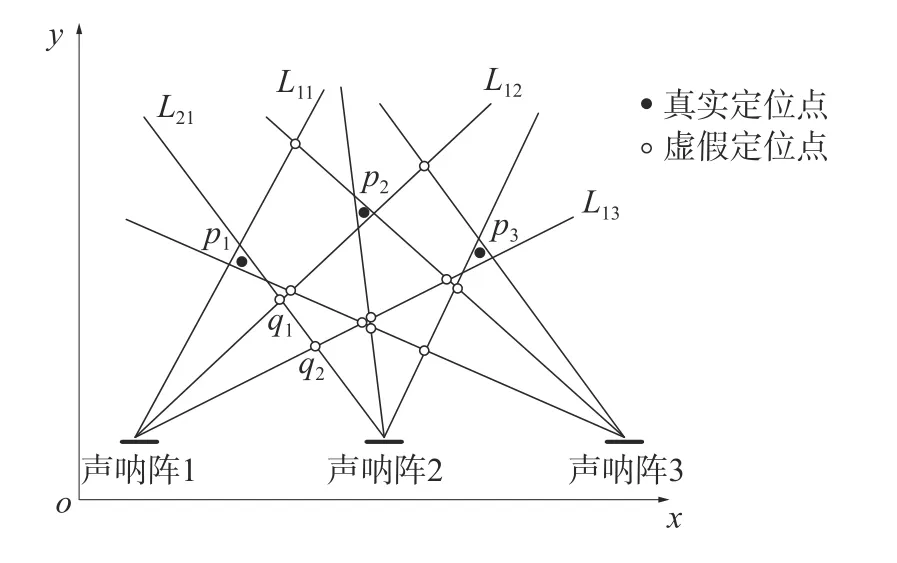
圖2 三陣測向交叉虛假點排除示意
圖2 中 Lij表示第 i個 聲吶陣的第 j條測向線,pi表示目標真實位置, qi為虛假定位點。為了方便示意,圖中3 個聲吶陣在同一水平線上,實際處理時不需要多個聲吶陣位于同一水平線。
方位粗關聯算法的詳細步驟如下:
1)假設每個聲吶陣都能測量到所有目標,針對M 個目標,每個聲吶陣測得 M條測向線。對聲吶陣1 的每條測向線進行編號,記為 L1j(j=1,2,···,M),分別統計聲吶陣1 與聲吶陣2、聲吶陣1 與聲吶陣3 各條測向線交點。以聲吶陣1 的第 j條測向線L1j為基準,聲吶陣2 各條測向線與其交叉形成的定位點集合記為 {d1j,2l=(x1j,2l,y1j,2l)}。類似地,聲吶陣3 與聲吶陣1 的交叉定位點集合為{ d1j,3k=(x1j,3k,y1j,3k)}。
2)以聲吶陣1 測量1 號目標的測向線 L11為基準,搜索所有可能的候選關聯組合。與 L11有關的交叉定位點集合是 {d11,2l}和 {d11,3k},由于角度測量誤差的存在,每個集合里只有1 個點是與目標真實定位點相關聯的。遍歷2個定位點集合,計算每2 個點之間幾何距離。記為集合{Dlk=}。
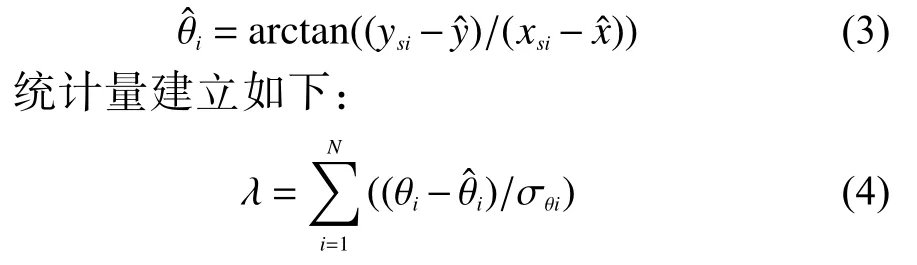
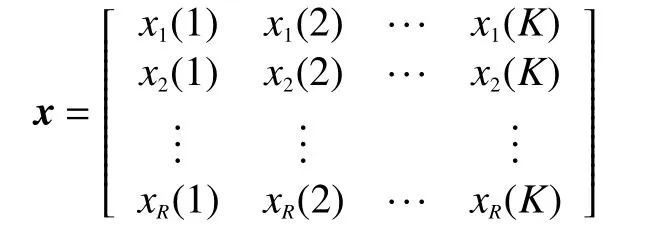
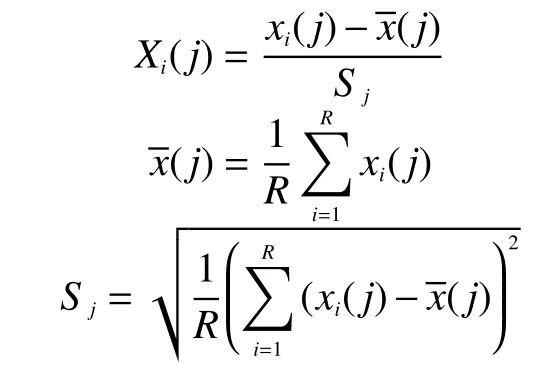
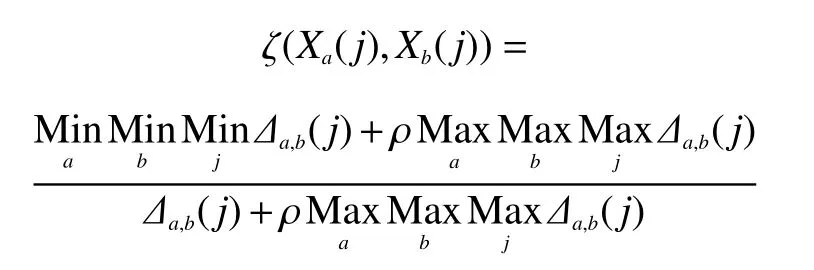
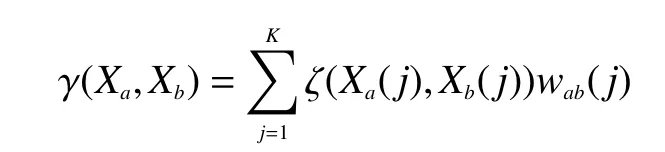
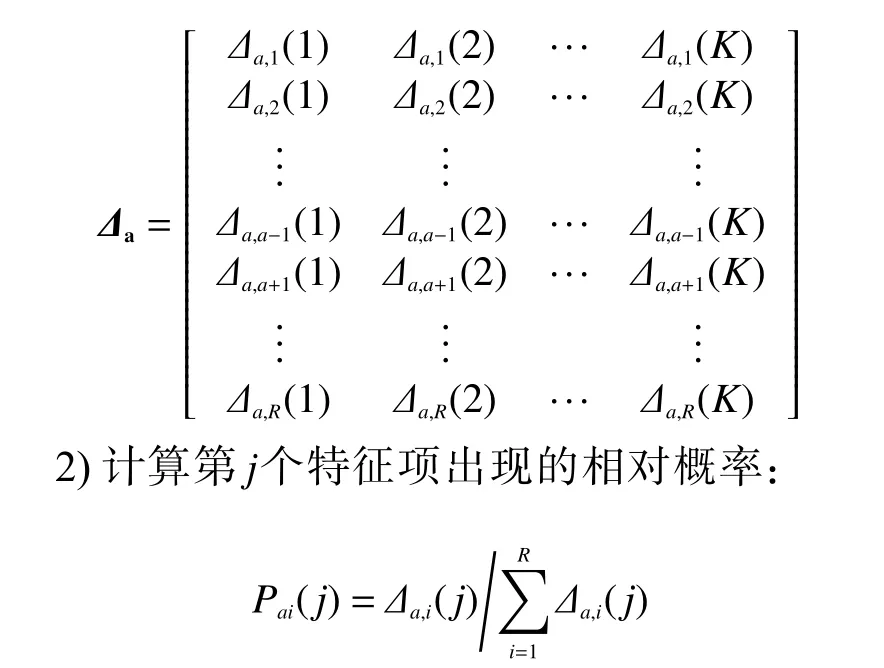
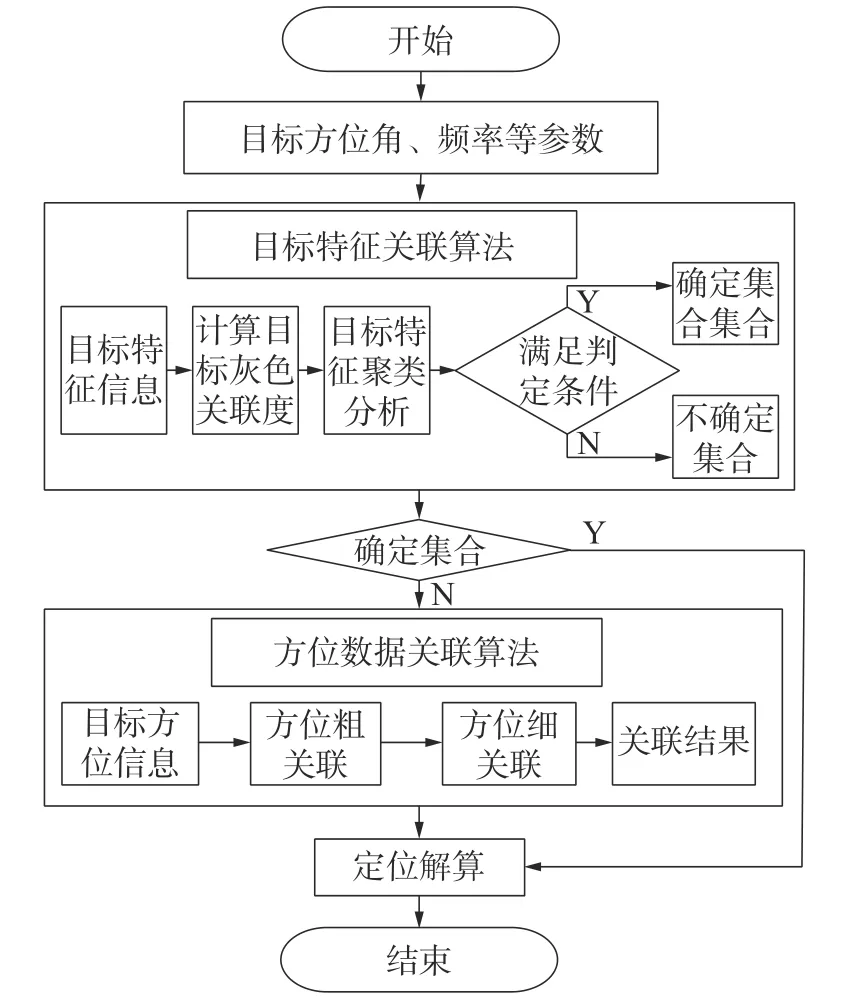
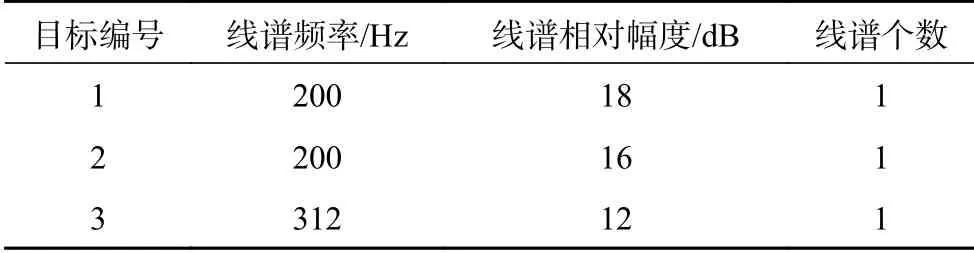
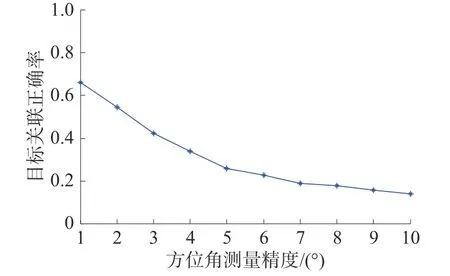
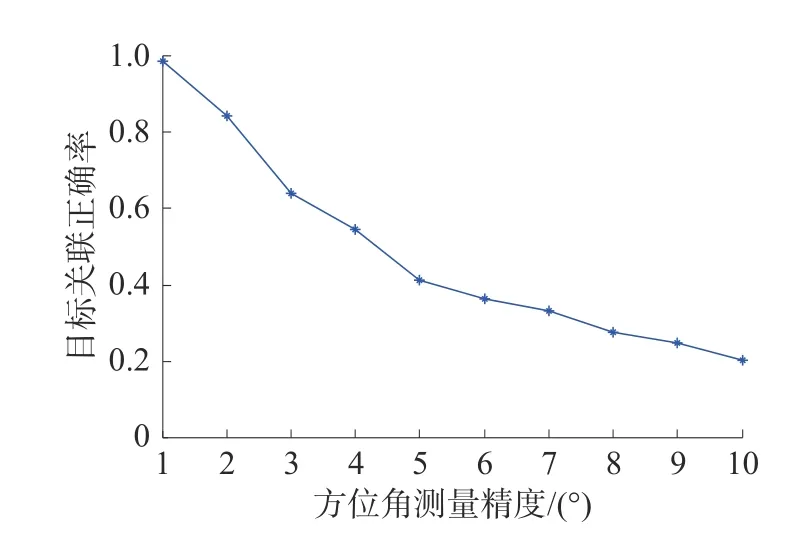
利用式(2)得到判決門限 G, 計算 L11測向線上所有滿足 Dlk 3)利用最小距離法,針對測向線 L11上的關聯集合 A1, 對每個候選組合的 d11,2l與 d11,3k幾何距離由小到大排序,認為幾何距離最小的關聯組合是正確組合,記為 R={1,l′,k′}。由于1 條測向線僅針對1 個目標,與 L11上 的定位點關聯后, L2l′與其他測向線形成的交叉定位點即為虛假定位點。如圖2 所示, p1是 L11上 與聲吶陣2 的 L21測向線確定的真實目標交叉點,則 L21與 L12測 向線的交點 q1、 L21與 L13測向線交點 q2均被排除。 4)確定了 L11上針對目標1 的候選關聯集合A1后 ,重復步驟2)和3),確定 L12上針對目標2 的候選關聯集合 A2。由于之前計算測向線組合R{1,l′,k′}時 ,對測向線 L12與其他測向線的交叉點做過排除處理,可能會導致 A2是一個空集,即沒有符合約束 Dlk 5)計算出針對1 號聲吶陣的各個測向線L1j(j=1,2,···,M),針對各個目標的方位候選關聯集合Am(m=1,2,···,M)。 對 于 Am,若 其 中 元 素 超 過1 個,即包含多個方位組合,稱為不確定關聯集合;對于只含有1 組方位關聯的集合 Am,稱為確定集合。對于不確定關聯集合,還需要利用細關聯處理,篩選出唯一的方位關聯組合。 從步驟4)可以看出,方位數據粗關聯時,存在一種檢驗機制,即關聯集合 Am會 受到 Am?1的限制。判決門限 G的取值對于候選方位集合的判定有著很大的影響,直接關系到方位數據關聯的正確性。如果粗關聯形成的不確定集合內元素過多,可以適當減小門限,提高方位關聯正確率。 經過方位粗關聯,有些候選關聯集合 Am含有多個方位組合。針對這種不確定集合,還需要進行細關聯處理,最大程度上排除錯誤組合。對于任意不確定集合 Am, 其中含有 n個方位組合,根據每個方位組合的有效測量值,計算目標最小二乘估計位置為 X=[x?,y?]T,目標估計位置相對于聲吶陣的方位估計值為 式中: N表示每個方位組合中有效測量值個數,由于存在假設每個聲吶陣的每條測向線只針對1 個目標,即 N 與參與處理的聲吶陣個數相等; θi為第si個 聲吶陣實際測得目標方位值; σθi為聲吶陣測量方位角的標準差。 檢驗統計量 λ 近似服從 χ2分布,自由度為 式中: nx為待估計參數個數, nz為測量量個數。由于深度已知,只需要估計目標定位點二維坐標(x,y) , 則 nx=2。 測量量只有目標方位角,則 nz=1。通過檢驗統計量 λ與顯著檢測水平 α比較,判斷該方位角集合是否針對同一目標。其中顯著性檢驗就是事先對檢測量做出假設,利用樣本信息來判斷這個假設是否合理,根據“小概率事件實際不可能性原理”來接受或否定假設。 綜上所述,目標方位細關聯步驟如下:1)對于不確定集合的每個方位組合進行最小二乘估計,計算目標最小二乘位置;2)利用式(3)計算目標方位估計值;3)根據式(4)建立檢測統計量。確定顯著檢測水平 α后,根據自由度 n查 找 χ2分布表,進而獲得方位細關聯判決門限 λa(n)。若檢驗統計量滿足 λ ≤λa(n),則此方位組合是正確的候選關聯,否則為錯誤的方位關聯,應該排除。在檢測水 平 為 α=0.001并 且 自 由 度 n=1時,判 決 門 限λa(n)=10.038。如果某個方位組合計算的統計檢測量小于判決門限,說明在99.9%概率下,該組合中的所有方位來自于同一個目標。由于方位粗關聯時,已經過濾了一些候選關聯組合,不確定集合 Am中的候選方位組合較少,對應細關聯次數減少,算法的運算速度得到提高。 由于多個目標存在,虛假定位點數急劇增加,被動目標定位難度大大增加。但是被動聲吶系統在獲得目標方位角信息的同時,也可以獲取目標的特征信息,如目標的固有頻率、線譜個數和葉片轉速等信息。在方位數據關聯前,利用輻射源目標的特征信息進行關聯,可以減少虛假點定位的計算量。 對于一個含有 M個聲吶陣的分布式聲吶系統,某次試驗中共有 N個不同目標。同一時刻,系統的數據融合中心收到 R條 報文,即 R=MN。以艦船目標為例,每條目標報文信息均包括線譜頻率、線譜幅度、線譜個數等 K項目標特征,則某一時刻全部目標的特征屬性值構成如下所示目標特征序列矩陣[6]: 式中 xi(i=1,2···,R)表 示一條報文信息, R組特征向量既是比較序列,也是參考序列。 通常,采用平移標準差變換法,令變換后的第i個報文的第 j 個特征值為 Xi(j),其數學表達式如下: 令去量綱化后的目標特征序列矩陣為 X,每條報文特征值序列記為 Xi(j),即 任意2 個特征序列 Xa(j)和 Xb(j)之 間的第 j個特征差異值為 Xa(j)和 Xb(j)這2 個序列的第j個特征灰色關聯系數為[7] 由于關聯系數并不唯一,不能直觀地體現2 個序列關聯程度。定義灰色關聯度[8]: 式 中: wab(j)表 示 第 j個 特 征 項 權 重,且 滿 足 在加權灰色關聯算法中,權值的大小反映了該項特征的重要程度。特征項的權值越大,對關聯結果的影響越大。 在信息學理論中,用信息量度量信息的多少。信息量與事件發生的概率成反比,結合信息學中熵的概念,采用自適應熵為權重賦值,計算2 個特征序列的相似程度,判斷是否來自于同一目標[9]。算法步驟如下: 1)目標特征矩陣的每一行既是參考序列,也是比較序列。選擇參考序列為 Xa,計算參考序列與比較序列的絕對差,構成特征差矩陣[10]: 此時,第j個特征項的信息熵為 Eai(j): 參考序列與比較序列關于第j個特征項差異性系數越大,該特征項對于衡量比較序列和參考序列的差異性越重要,應該賦予的權重越大。 3)計算第 j 個特征項的權重值: 各個特征序列與比較序列的加權灰色關聯度矩陣為 系統聚類分析法的原則是首先把多個樣本自成一類,每個類之間的距離描述各個類的相似程度[11],把距離最近的類合并,使類的數目減少。隨后更新現有類之間的距離,再次進行類合并,使類的數目進一步減少,直至所有樣本歸為一類為止。本節采用樣本的加權灰色關聯度代替距離,以此作為分類依據,減少計算量[12]。 假設共有 S個類,記為 G={Gi|i=1,2,···,S }。類間相似度用 μ表示,則類 Ga和 類 Gb之間的相似程度定義為 式中若 a=b, 則令 μab=1。 初始時,數據中心收到 R條報文,令每條報文各自成為一類,記為 G={Gi|i=1,2,···,R}。計算各類之間相似程度矩陣為 初始時刻,每條報文各自組成一個類,滿足μab=γ(Xa,Xb)。 在相似度矩陣 μ中,找出非對角線元素中最 大值 μpq, 其對應類 Gp和 Gq。把這2 個 類合并為新的類 Gr={Gp,Gq}。合并后,計算該類與其他類的類間相似度,新類 Gr與未發生改變的類 Gt之間μrt為 最后,利用分類準則函數判斷 R條報文應該融合分為幾類。一個聚簇劃分的合理性體現在不同聚簇之間相似度很低,同一聚簇相似度很高。假設R條報文融合分類形成z個聚簇,即C={C1,C2,···,Cz}。其類內緊湊度函數為 式中 |Ci|表示聚簇類中原始類個數。 類間分離函數為 當分類準則函數值最大時,對應分類個數最為合理。理想情況下,對于目標個數為 N、聲吶陣個數為M的被動定位系統,每個聲吶陣均向數據融合中心傳送 N條報文。由于受到環境因素影響,各個聲吶陣上傳報文數不完全相等,數據中心實際收到報文數為r。此時合理的目標分類個數應該在 r/M附近,找出分類準則函數在分類數約為 r/M 左右的最大值,對應分類個數為t,記錄此時分類結果。 由目標方位數據關聯算法可知,由于多個目標存在,虛假定位點數急劇增加,被動目標定位難度大大增加。但是,被動聲吶系統在獲得目標方位角信息的同時,也可以獲取目標的特征信息,如目標的固有頻率、線譜個數和葉片轉速等信息。當多目標軌跡交點分布較為聚集時,只利用方位數據關聯算法正確率有所降低,此時在方位數據關聯前,利用輻射源目標的特征信息進行關聯,可以減少虛假點定位的計算量。如果目標屬性關聯結果不唯一,可以再進行方位數據關聯。2 種算法具有互補性,聯合關聯流程如圖3所示。 圖3 方位?特征數據聯合關聯流程 3 個 聲 吶 陣 坐 標 分 別 為 (0,0)、 (10,0)和 (20,0)。同一時刻目標個數為3,每個目標間距d=2。其位置坐標如下:目標1(11,10)、目標2(11+d,10)和目標3(11?d,10),單位均為km。各目標特征值如表1所示。線譜頻率和歸一化幅度測量(以最大幅度為準)誤差服從均值為0、標準差分別為5 Hz 和20 dB 的高斯分布,線譜個數正確估計率為60%。 表1 目標特征參數設定 目標方位數據關聯法進行1 000 次蒙特卡洛試驗,得到不同角度測量精度下的關聯正確率如圖4 所示。其中,將3 個目標都正確關聯記為正確,有1 個關聯錯誤即為錯誤。 圖4 方位數據關聯法正確率 由圖4 可知,在目標間距較小時,只利用方位數據進行目標關聯得到正確結果概率較低。在上述仿真條件下,只利用目標特征灰色關聯算法,統計1 200 個融合周期,最優分類函數分布狀態如圖5 所示。 圖5 灰色關聯法指標函數 根據表1 可知,3 個目標中有2 個目標的各個特征相似。在上述仿真測量誤差下,2 個目標的特征項存在模糊,只利用目標特征的灰色關聯算法會發生錯誤關聯。分析仿真中發生關聯錯誤的原因發現,該算法會錯誤地將3 個目標關聯融合為2 類,不能很好地區分1 號目標和2 號目標。 此時,利用目標特征灰色關聯,得出最佳聚簇分類。針對報文條數多于 r/M的聚簇類,再次進行方位關聯。在仿真條件不變的情況下,得到不同角度測量精度下的聯合關聯算法正確率如圖6所示。 圖6 目標特征-方位聯合關聯 對比圖4、5 和6 可知,在目標距離較近且目標特征測量誤差較大時,單獨使用方位數據關聯或者特征關聯的正確率都比較低。隨著目標信息測量的精度增加,使用2 種算法進行聯合關聯,可以有效減少虛假定位點個數。 在目標間距較小時,各個聲吶陣測向線交叉點分布較為集中,目標真實位置與虛假點位置間的距離較小,方位數據關聯正確率較低。特征數據關聯算法受到特征測量誤差影響,不同目標屬性值測量范圍有重合,測量得到的目標特征值存在模糊,不能很好地區分不同目標。 本文基于上述方法對目標數據進行聯合關聯,彌補單一方法帶來的不足,提高目標關聯正確率。1.2 方位細關聯

2 目標特征數據關聯
2.1 傳統灰色關聯


2.2 自適應熵權灰色關聯度
2.3 系統聚類分析

2.4 目標方位?特征聯合關聯
3 仿真實例

4 結論
猜你喜歡
當代陜西(2021年17期)2021-11-06 03:21:36瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02當代陜西(2019年10期)2019-06-03 10:12:04中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45學苑創造·A版(2018年11期)2018-02-01 06:29:20數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54讀者(2017年5期)2017-02-15 18:04:18少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21