基于LoRa的分布式火災監測報警系統的設計與實現
2020-08-31 14:40:43文淵博牛澳毛夏煜張桃靖馮興樂
物聯網技術 2020年8期
文淵博 牛澳 毛夏煜 張桃靖 馮興樂
摘 要:物聯網技術的飛速發展實現了人與物、物與物間的通信與控制,使我們的生活更加趨于智能化。在實際生活中,常見的有線按壓式火災報警裝置無法自動報警,在發生火災時需要人為按下開關才能工作,而且在發生火災時其供電電路往往會被燒毀,使開關無法發揮作用。因此急需研究一種基于LoRa的分布式火災監測報警系統,該系統可以用來遠距離監測多種場景下的火災情況,并在發生火災時及時上報并報警。經過反復實驗,該系統能夠可靠地反饋場景火災情況,且LoRa較遠的傳輸距離與極低的功耗能夠充分滿足系統需求。
關鍵詞:物聯網;火災監測報警;LoRa;串行口通信;單片機;傳感器
0 引 言
據統計,2019年3月份全國共接火災報警2.24萬起,傷亡近200人,直接財產損失約2.14億元。其中室內火災9 084起,占到總數的40.5%,是人們生命財產安全受到傷害的一大源頭[1]。由此可見,室內的火災實時監測是亟待解決的重要問題。
目前來說,考慮到成本問題,多數建筑內部使用的報警裝置均安裝在樓道或者主要倉室等地方,室內特別是私人辦公室很少見到火災報警裝置,并且大多數建筑使用的是傳統按壓式報警系統,該裝置需要人為按壓才能進行火災報警,具有一定的滯后性與危險性。雖然目前已經出現了許多類型的自動火災報警系統,如基于視覺分析,ZigBee,WiFi,藍牙等,但造價昂貴、傳輸距離短等缺點使許多用戶對其望而卻步。鑒于此,設計造價低廉、通信距離遠、傳輸速率大、功耗極低且能被廣泛應用的基于LoRa的火災報警系統便成為最佳選擇。該系統可在發生火災時由子節點第一時間報警并發送火災信息至匯總節點,方便用戶盡早發現火災并采取相應措施,避免造成大的人員傷亡和財產損失[2]。
1 系統的設計與架構
按照主要功能的不同可以將系統分為感知端、收集端和應用端。
(1)感知端包括MSP430F149單片機、感光火焰傳感器、LoRa無線通信模塊等,負責感知其范圍內是否有火災發生,生成包含當前地址和火災信息的數據并發送至收集端。
(2)收集端包括LCD顯示模塊、LoRa無線通信模塊等,負責收集來自感知端的數據,分析所得數據,得出包含的地址信息和火災狀態后,在LCD對應位置進行顯示并將這些信息發送至應用端。
(3)應用端是基于面向對象的Java程序設計語言開發的、適用于該系統的、可拓展的串行口通信軟件平臺,其主要負責分析由收集端上傳的數據,并在分析后判斷是否某一子節點有火災發生并顯示該子節點狀態,若發生火災便立即報警。
系統整體架構如圖1所示。
2 系統的實現
2.1 感知端的實現
感知端通過火焰傳感器判斷是否發生火災,在接收到由收集端下發的回送數據命令后將包含地址信息和火災情況的數據發送至收集端,根據是否發生火災改變節點處的火災指示燈狀態與是否報警。該端以MSP430F149單片機為控制核心,它是一個16位、具有精簡指令集、低功耗的單片機,擁有多路I/O設備接口,可以實現兩路串行通信,大大簡化了開發流程[3]。該端的主要實現電路如圖2所示。
采用感光火焰傳感器判斷是否發生火災。該傳感器能將外界紅外光的強弱變化轉化為電流變化,探測角約60°。為更加方便地獲取傳感器狀態,結合可調精密電位器和反相電壓比較器LM393共同構成火焰探測模塊,其中可調精密電位器用來調節感知火焰的靈敏度,以滿足在不同場景下監測火源對于靈敏度的不同要求。電壓比較器作為輸出口輸出邏輯電平,以提高該模塊的驅動能力,保證輸出波形良好。當傳感器感知到有火災發生時,輸出波形會產生一個下降沿令MCU產生外部中斷,進入中斷后將執行蜂鳴器響、指示燈亮、回送數據等操作。火焰探測模塊電路連接方式如圖3所示。
為實現向收集端發送數據的功能,該系統使用由ALIENTEK公司推出的低功耗、高性能、遠距離收發的LoRa無線通信模塊,其采用高效的ISM頻段SX1278擴頻芯片。SX1278芯片采用LoRa線性擴頻調制技術,其具有很強的通信抗干擾能力,對于相同頻率的干擾和噪聲具有極強的抑制能力;其抗多徑衰落能力表現良好,傳輸數據的誤碼率極低[4]。該模塊頻段范圍為410 MHz~441 MHz,以1 MHz為步進信道,共32個信道,功率為100 mW,接收靈敏度為-136 dBm,傳輸距離約為3 000 m。LoRa無線通信模塊與ZigBee,WiFi,藍牙等無線通信類型的對比見表1所列。在與MSP430F149單片機連接前,需要通過AT指令設置該模塊工作在透傳模式,其波特率也應與單片機串行口通信設置的波特率一致,如此才能確保傳輸數據調制解調正確進行[5-6]。配置完成后,需要定義模塊的TXD引腳、RXD引腳與單片機的對應引腳,并將其設置為特殊功能引腳,從而實現模塊與MCU串行口的正常互通。
2.2 收集端的實現
收集端用于接收來自各節點的數據,并對數據進行分析,得出其中所包含的地址信息和火災狀態。在LCD中對應位置顯示后再將數據重新打包發送至上位機。該端的功能主要利用LoRa模塊和串行口通信實現,其主要實現電路如圖4所示。
2.2.1 LoRa軟件協議
在實際生活中,需要同時監測的節點數一般超過10個,如果分別為每個節點配置一個具有感知端、收集端的單片機和LoRa無線通信模塊,這無疑大大降低了系統的拓展性,因此定義LoRa無線通信模塊發送或接收的數據除模塊地址及校驗位外,有效數據為一個字節長度。在這一個字節長度的數據中,高7位為子節點地址,低1位為該子節點所監測的對應地址下的火災狀態。并定義某一子節點發送的有效字節數據與11111110進行與邏輯運算,得到一個字節,其為該子節點可識別的回送數據命令,如某一子節點發送的數據為10101101,在與11111110進行與邏輯運算后可得出該子節點可識別的回送數據命令為10101100,即當該子節點收到10101100這一個字節的有效數據命令時,便將已準備好的數據通過LoRa回送至收集端。
當感知端、收集端分別上電后該系統開始工作,此時收集端向應用端告知其已在線,之后便通過收集端LoRa從所定義的最低地址即00000010到最高地址11111110循環廣播這些命令,在感知端接收到當前子節點的回送數據命令后便回送數據,大大降低了數據在傳送過程中丟失與發生錯誤的幾率[7-8]。另外,由于LoRa是一種半雙工無線通信模塊,在通信時極大可能發生收發數據沖突情況,為解決多個子節點向一個匯總節點發送數據時可能發生的數據堵塞、碰撞等問題,收集端在廣播的兩個命令之間插入了一定延時,以此保證在收集端接收來自感知端的數據時信道處于空閑狀態。
該軟件協議方案的提出,一方面增強了該系統的拓展性、穩定性,另一方面將可掛接子節點增加至128個,滿足了絕大多數場景下同時監測多個場景火災情況的要求。
2.2.2 上傳數據至應用端的實現
MSP430F149單片機可以進行兩路串行口通信,但在感知端與收集端的通信結構中已經占用了該單片機的UART0串行口,因此使用UART1作為向應用端上傳經收集端分析打包的數據串行口。在該系統中收集端無需從應用端得到下送數據或命令,因此除供電電路外收集端與應用端僅需1根串行通信線即可實現上傳數據的功能,為故障源檢測和系統搭建解決困難[9]。
2.3 應用端軟件的實現
應用端由面向對象的Java程序設計語言實現,該語言具有面向對象、多線程等特性,結合RxTxcomm.jar依賴包便可以很快地實現串行口通信,又因該語言的平臺無關性,使得該應用端軟件可以一次編譯,廣泛運行,大大拓寬了該系統的應用面[10-11]。應用端系統流程如圖5所示。
基于LoRa的分布式火災監測報警系統的應用端主界面如圖6所示,該軟件將每一節點對應具體地址,通過分析由收集端上傳的數據來確定是否改變對應節點的狀態燈狀態,并在監測到火災發生時通過上位機揚聲器報警。但由于該系統目前是可實用的非商業化系統,故在此應用端軟件中只出現了兩個節點來滿足系統整體功能測試,并未將所有掛接子節點體現。為了進一步加強系統的再生能力和靈活性,在軟件接收到由收集端上傳的來自所定義的最大地址的子節點數據時,統計已經收到的所有數據,并判斷是否未收到來自某一子節點的數據,將對應的子節點地址通過下拉列表顯示,以方便用戶及時發現故障并維修。除此之外,該軟件提供用戶自定義功能,用戶可在系統安裝初期確定每一個子節點所對應的房間號或樓層號等具體地址,只需要在對應子節點后的TEXT輸入框中輸入即可。安裝完成后,用戶可以從主界面中監測每一個具體地址的火災情況。
3 系統測試及分析
待該系統的三個功能端建立后,在模擬實際應用場景下進行測試。為簡化測試條件,實驗場景包括2個感知端子節點、1個收集端、1個應用端,使用打火機火焰作為模擬火源,分別測試火焰傳感器的感知范圍、LoRa實際有效通信距離、系統整體工作性能,以及當某一功能端發生故障時系統的工作情況,進一步確認該系統是否可對實際應用場景下的火災情況進行監測與報警[12]。
3.1 火焰探測模塊測試
該探測模塊基于感光傳感器建立,在電路中采用LM393反相電壓比較器作為輸出接口,該電壓比較器在未探測到火焰時電路保持高電平輸出,探測到火焰時輸出為低電平,在火焰消失時輸出變回高電平。在該電路中,如果將滑動變阻器調節至0 Ω,則無論外部環境如何變化,模塊輸出恒為高電平;如果將滑動變阻器調節至10 kΩ,則無論外部環境如何變化,模塊輸出恒為低電平。
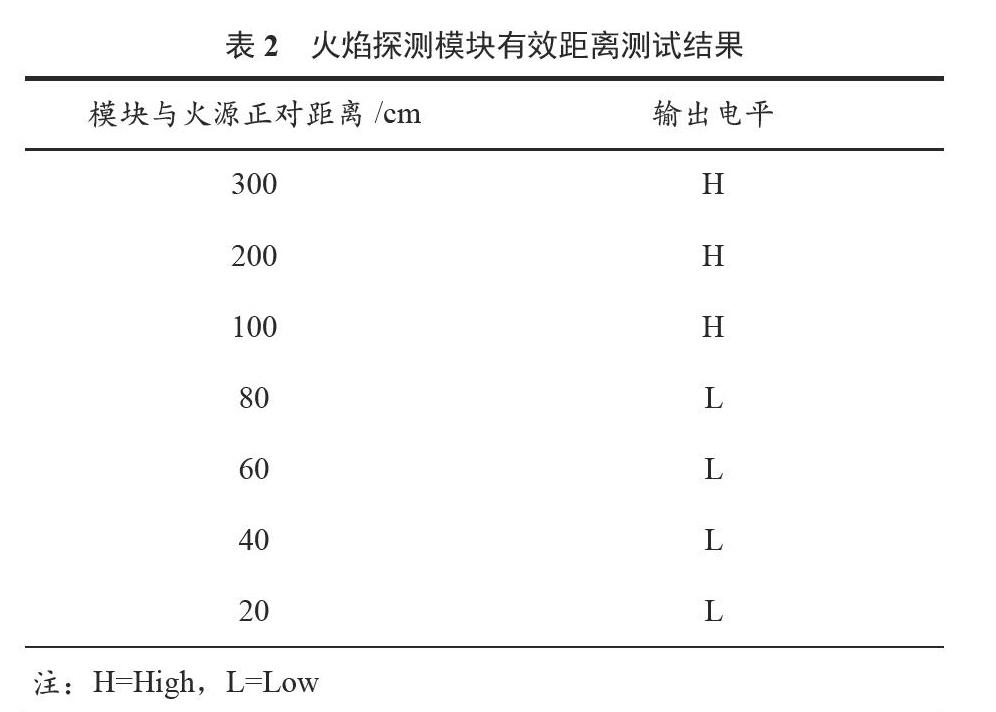
通過綜合考慮,將滑動變阻器用一7 kΩ的定值電阻代替進行測試,通過數字示波器觀察模塊輸出波形變化,控制模擬火源正對傳感器保持不變,測量在不同距離時模塊的輸出結果,具體見表2所列。
通過觀察測試結果,火焰探測模塊與模擬火源正對距離不超過80 cm為該探測模塊的可感知有效距離。但因為測試使用的模擬火源是打火機火焰,其火焰強度不足,而實際場景中的火源強度更高、面積大、溫度高,更容易被該探測模塊感知到,故根據本次測試結果可知,該模塊探測火焰的靈敏度高,且輸出穩定,滿足該系統室內范圍監測的設計要求。
3.2 LoRa有效通信距離測試
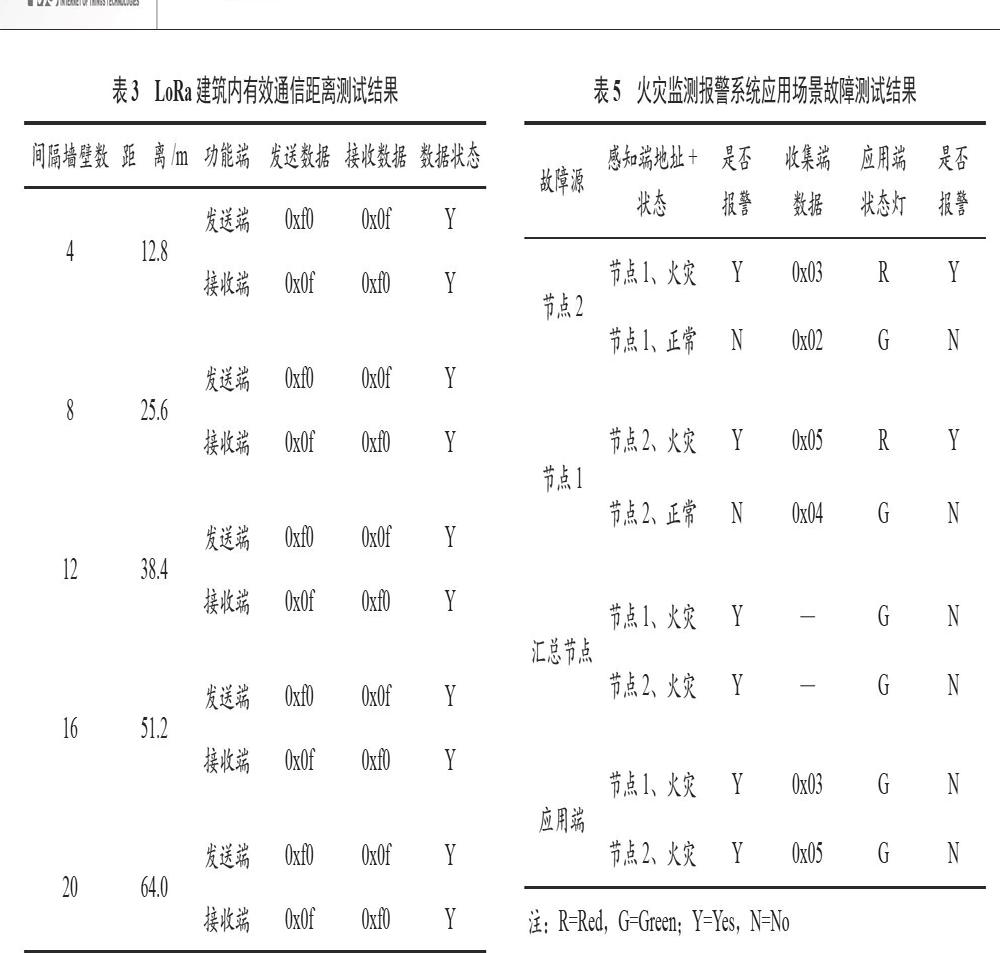
作為實現本系統通信功能的核心模塊,LoRa無線通信距離是決定整個系統能否實現遠距離通信的關鍵[13],為此在建筑體內對感知端與收集端的有效通信距離進行測試,測試前分別在感知端和收集端MSP430F149單片機的第二組I/O口接8個LED電平指示燈。測試方法:感知端發送一個字節有效數據0xf0到收集端,收集端在收到該數據后利用8個LED電平指示燈顯示二進制碼,然后將這一字節的二進制數求反碼并發送給感知端,感知端在收到該數據后利用LED電平指示燈顯示該二進制碼(此后所有二進制數將轉化為十六進制表示)。為簡化實驗變量,本實驗只測試了不同樓層間的LoRa通信情況,且墻壁厚度默認一樓天花板到二樓地面的距離為20 cm,每層樓高度為3 m,具體測試結果見表3所列。
該測試方法盡可能還原了本系統發送端與收集端每次通信所需要發送的數據大小和實際的應用環境,實驗中接收數據錯誤的概率為0,結果證明,LoRa的建筑內無線通信距離滿足該系統的設計要求。
3.3 系統整體測試
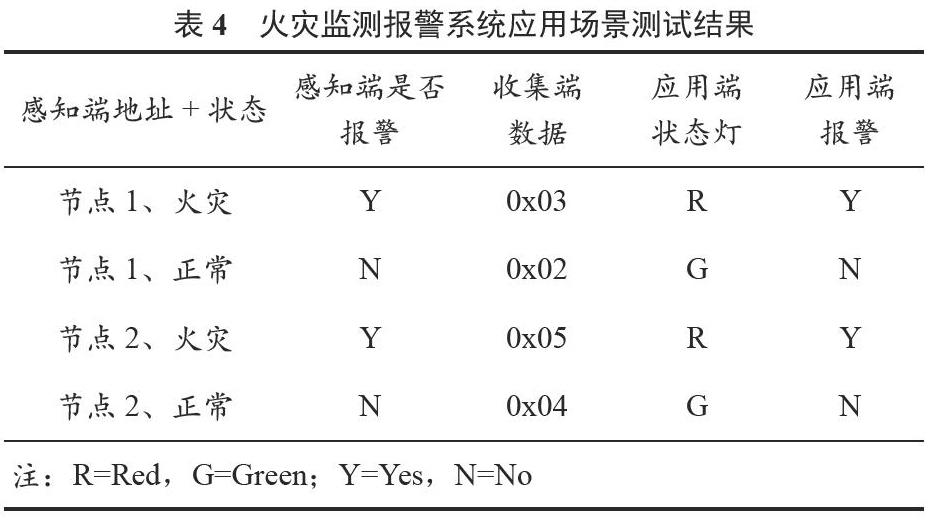
在火焰探測模塊和LoRa無線通信模塊測試完成后,考慮到實際應用場景裝置放置情況,將兩個感知端子節點分別放置在建筑體兩層的兩個房間內,并在另一層放置收集端與應用端,以此進行系統整體測試[14]。本次測試結果見表4所列。
測試表明,該系統的監測結果與人工監測結果一致,而且能夠自主報警與顯示,滿足該系統的整體設計要求。
3.4 系統故障測試
火災監測報警系統應用場景故障測試結果見表5所列。
可以看出,在某一感知端子節點出現故障時,不影響其他子節點的正常工作;在收集端出現故障時,各感知端子節點可實現獨立工作;在應用端出現故障時,各感知端子節點與收集端均可正常工作。
4 結 語
本文通過分析目前的火災安全問題現狀,基于LoRa無線通信模塊,使用MSP430F149單片機作為三端連通核心,結合物聯網技術、傳感器技術以及面向對象的Java程序設計語言,實現了基于LoRa的分布式火災監測報警系統。通過闡述該系統3個功能端的設計原理與實現方案,經過在實際應用場景下具體的反復測試與結果分析,確定該系統滿足監測火情、自主報警、無線通信的功能需求,并且可以進行準確、穩定、遠距離數據傳輸。另外,無論是感知端還是應用端都具有極強的可擴展性,可以根據實際場景的需要進行不同的擴展及開發。綜上所述,基于LoRa無線通信背景下的火災監測報警系統將是消防安全領域中新的發展方向,其將火災監測、火災報警、物聯網技術相結合,能夠高效地挽救生命財產。
參考文獻
[1]龍灣消防分局.數據帶你走進2019年第一季度火災分析[EB/OL].https://zj.zjol.com.cn/qihanghao/100056005.html.
[2]李宏文,張向陽.建筑物火災監控系統的智能化發展[J].工程設計CAD與智能建筑,2002(2):21-23.
[3]岳洋,焦運良,邢計元.基于MSP430的智能數據采集系統[J].信息技術與網絡安全,2019,38(10):73-77.
[4]趙靜,蘇光添.LoRa無線網絡技術分析[J].移動通信,2016,40(21):50-57.
[5]鄔亮,吳卓葵,曾楊達,等.基于LoRa的溫室多點無線監測系統設計[J].仲愷農業工程學院學報,2020,33(1):1-5.
[6]霍振龍.LoRa技術在礦井無線通信中的應用分析[J].工礦自動化,2017,43(10):34-37.
[7]王陽,溫向明,路兆銘,等.新興物聯網技術:LoRa[J].信息通信技術,2017,11(1):55-59.
[8]陳曉靜.基于MSP430單片機的多機串口通信設計[J].信息化研究,2009,35(12):35-37.
[9]趙太飛,陳倫斌,袁麓,等.基于LoRa的智能抄表系統設計與實現[J].計算機測量與控制,2016,24(9):298-301.
[10]吳金鋒,劉偉平,黃紅斌.Java串口通信數據采控系統的設計與實現[J].微計算機信息,2010,26(10):65-66.
[11]丁振凡,王小明,鄧建明,等.基于Java的串口通信應用編程[J].微型機與應用,2012,31(13):84-86.
[12]岳云濤,賈佳,王靖波,等.基于LoRa無線傳輸技術的電氣火災監控系統設計[J].電子技術應用,2018,44(12):32-35.
[13]顧兆平.基于LoRa無線通信技術的電氣火災監控系統[J].消防技術與產品信息,2018,31(10):50-52.
[14]楊歡,李紅信.一種采用LoRa技術的智能水表設計[J].無線電工程,2017,47(12):75-78.
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年19期)2017-02-02 07:08:27
中國科技博覽(2016年19期)2016-10-19 14:58:22
電腦知識與技術(2016年21期)2016-10-18 22:33:02
中國新通信(2016年16期)2016-10-18 11:00:54
科學與財富(2016年28期)2016-10-14 01:24:06
環球時報(2016-08-01)2016-08-01 07:04:45
