基于STM32的智能輪椅控制系統設計
2020-08-31 14:40:43彭天然張梅
物聯網技術 2020年8期
彭天然 張梅


摘 要:為了更好地服務老年人和殘障人士,文中設計一種基于STM32的智能輪椅控制系。該系統主要由主控芯片、傳感器模塊、人機交互模塊、電機驅動模塊、GPS模塊、無線通信模塊和報警模塊等部分組成,實現輪椅的自動感知、可靠控制、無線通信、GPS定位等多種功能。實驗結果表明,該系統具有功耗低、可靠性強、功能多等優點。
關鍵詞:智能輪椅;STM32;控制系統;人機交互;無線通信;GPS
0 引 言
為了更好地服務老年人和殘障人士,使其獲得更好的幫助,盡可能地融入社會,最大程度地節約人工陪護成本,各國都致力于功能豐富的輪椅的研究。隨著物聯網技術的發展,輪椅越來越智能化、人性化。目前存在的智能輪椅是在電動輪椅的基礎上,集合一些人工智能技術,使輪椅具備較好的自主性、適應性與交互性。
本文設計了一種基于STM32的智能輪椅控制系統。該系統以STM32為控制核心,其利用低功耗控制芯片、高精度傳感器、GPS模塊、超聲波模塊、無線通信模塊,實現輪椅的自動感知、可靠控制、無線通信、GPS定位等多種功能。
1 系統結構
基于STM32的智能輪椅控制系統的結構如圖1所示。
該系統主要由主控芯片、傳感器模塊、電機驅動模塊、人機交互模塊、GPS模塊、無線通信模塊、報警電路、電源電路、時鐘電路、復位電路等部分組成。使用者通過按鍵可選擇不同的人機交互模式,如操縱桿、按鍵或手機等;通過傳感器模塊中的角度傳感器和次聲波傳感器采集輪椅自身和外部環境的信息,經主控芯片分析處理后,控制電機驅動模塊使電機運行;系統內部設置自動避障算法,可進行自動避障;其GPS模塊可以定位輪椅,通過無線通信模塊將位置信息、輪椅信息發送給監護者,在輪椅發生跌倒時本地報警的同時還發送報警信號到監護者手機端。
2 硬件電路設計
系統的主控芯片選用意法半導體公司(ST公司)的STM32F103C8T6。該芯片具有較高的實時性、較低的功耗、豐富的片外擴展能力、強大的數據處理能力等。所有外圍電路均與主控芯片相連,由主控芯片進行數據處理和控制。下面對部分硬件電路做介紹。
2.1 傳感器模塊電路
系統傳感器模塊主要有角度傳感器、超聲波傳感器,用來感知智能輪椅的自身狀態和外部的環境信息,來確定輪椅自身的位姿信息、周圍環境和障礙物的距離信息等。
角度傳感器選用MPU-6050角度傳感器,其與主控芯片的連接電路如圖2所示。
MPU-6050角度傳感器通過I2C接口與STM32F103C8T6相連接,通過I2C串口通信實現角度信息的傳送。
超聲波傳感器采用HC-SR04超聲波傳感器,來獲得輪椅與物體的距離信息。這里設計了3路超聲波傳感器,分別安裝在輪椅的前方、左側和右側,同時采集這3個方向的距離信息,通過避障算法控制后達到較好的避障效果,超聲波傳感器與主控芯片的連接電路如圖3所示。
圖3中的3個HC-SR04超聲波傳感器分別與STM32 F103C8T6的PC0~PC5等6個GPIO口相連,STM32 F103C8T6通過控制這些通信接口進行信息的交互。
2.2 電機驅動電路
智能輪椅采用后輪驅動的方式,每一個后輪配置一個電動機,這里采用雙H橋直流電機口驅動器L298N來驅動輪椅的左、右輪電機,實現電動輪椅的前進、后退和轉向,其驅動電路如圖4所示。
STM32F103C8T6通過光電隔離電路TLP521-4與電機驅動芯片L298N芯片相連。TLP521-4內部包含了4組光電耦合管,可以將負載電路與控制信號完全隔離,可以增強抗干擾能力提高電機驅動的可靠性。STM32F103C8T6通過控制ENA和ENB使L298N使能,通過控制IN1~IN4引腳的電平高低即可控制電機的正轉和反轉,OUT1~OUT4為控制信號輸出引腳,該引腳通過整流電路直接與電機相連進而控制電機的旋轉狀態。
2.3 人機交互模塊
人機交互接口要求操作簡單、便捷、合理,本系統的人機交互模塊組成如圖5所示。
本系統的人機交互模塊由手機端、操控桿和觸摸屏3個部分組成。手機端通過WiFi信號與輪椅相連,來設置相關參數、查看輪椅相關信息,同時也可操控輪椅。操控桿的控制方式為電磁感應式,控制輪椅的運動方向,同時在操控桿的手柄上增加一些獨立的功能按鍵,這里設置5個按鍵,分別是緊急停止、加速、減速、鳴笛、控制模式選擇按鍵。觸摸屏采用電容屏,可以實現輪椅的運動控制、參數設置、參數顯示等功能。
2.4 無線通信模塊與報警電路
本系統的無線通信模塊利用GPRS芯片SIM300通過手機短信的形式把輪椅位置、報警信息發送給指定人員,發生傾倒時本地報警,達到遠程監護的目的,其電路如圖6所示。
STM32F103C8T6的PB110和PB11引腳與SIM300的RXD和TXD相連,通過串口通信發送AT指令即可實現對SIM300模塊控制。同時在SIM300模塊的外圍擴展模塊上設計蜂鳴器電路,當輪椅發生傾倒可以實現本地聲音報警。
3 軟件設計
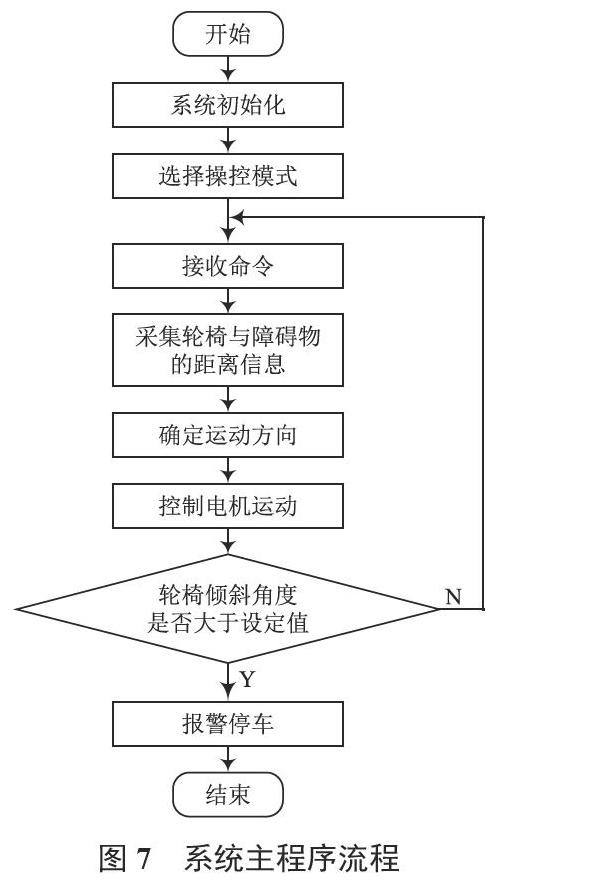
根據智能輪椅設計的運行情況,系統的主程序流程如圖7所示。系統的主程序是整個智能輪椅軟件編寫的整體框架,也是系統整個運行程序依據。系統主要完成硬件初始化、循環接收輪椅控制命令、控制電機運行等功能。
4 結 語
本文設計了一種基于STM32的智能輪椅控制系統,并給出了系統的總體結構、部分硬件電路和軟件流程。該系統選擇STM32F103C8T6作為主控芯片,采用模塊化、系統化的設計思想進行設計,傳感器模塊、人機交互模塊、電機驅動模塊、GPS模塊、無線通信模塊、報警模塊共同作用,相互協調,構成了一個安全可靠的智能輪椅控制系統。
參考文獻
[1]高強.面向老人的智能輪椅研究[D].蘇州:蘇州大學,2015.
[2]郝付英.智能輪椅控制系統研究與設計[D].濟南:山東大學,2012.
[3]朱亞坤,姚立綱,徐業良,等.基于物聯網的電動輪椅控制系統研究[J].機械制造與自動化,2019,48(2):164-168.
[4]滕興旺,從蘭美,邱建龍,等.基于單片機的智能輪椅控制系統設計[J].南京信息工程大學學報(自然科學版),2019,11(4):495-498.
[5]麻文剛,王小鵬,馬鵬.基于GMR傳感器校正的智能輪椅控制系統設計[J].傳感器與微系統,2018,37(1):117-119.
[6]石學文,杜勇,秦川,等.基于無線通信的電動輪椅控制系統的研究與設計[J].電子技術,2018,47(8):90-92.
[7]李瑛達,周海波,楊易青.腦波控制的智能醫療輪椅系統[J].物聯網技術,2019,9(5):63-66.
[8]ZHAO Cong,WANG Zhengxing,JIANG Shihong,et al. The design of wheelchair lifting mechanism and control system [J].Computer aided drafting,design and manufacturing,2014,24(2):? 43-47.
[9]陳真誠,龐雪燕,孫統雷,等.腦控智能輪椅控制系統[J].電子技術應用,2014,40(9):126-129.
[10]羅元,楊楊,張毅,等.智能輪椅嵌入式手勢控制系統設計與實現[J].中南大學學報(自然科學版),2013,44(z2):68-72.
