基于無線通信的交通信號燈線路檢測及控制研究
2020-08-31 14:40:43羅洋坤
物聯網技術 2020年8期


摘 要:針對目前在交通信號燈主控制機與交通信號燈之間的電線因道路施工人為損壞,環境因素使電線老化、接點氧化接觸不良等原因致使交通信號燈不亮或失靈而導致交通擁堵、癱瘓或交通事故的問題,文中基于無線通信技術的交通信號燈線路檢測及控制技術和方法實現了對交通信號燈線路的燈態信息實時檢測、監控,線路故障判斷及控制,解決了因交通信燈電線故障導致信號燈異常的問題,進一步提高了交通信號燈工作的穩定性和可靠性。
關鍵詞:交通信號燈;無線通信;檢測控制;人為損壞;線路檢測;ATmega128A
0 引 言
在國內積極打造智能交通系統的背景下,致力打造一個更加自動化、智能化的交通控制及管理系統,以提升交通管理和應對能力。國內對智能交通控制領域的研究比較多,劉志娟的基于無線傳感網的城市交通燈模糊控制系統設計[1]。王園園設計了基于無線傳感器的交通燈的遠程控制[2]。焦海華的無線傳感器網絡在交通燈故障監測中的研究[3]。由于交通信號燈是交通運行的指揮棒,是交通控制系統中的靈魂,一但交通信號燈失效,輕則導致交通癱瘓,重則引發交通事故[4]。同時在信號燈維修恢復過程也比較長,需要經過發現、報修,再通知交通相關部門安排技術人員維修,不僅耽誤時間,還無法短時間內恢復。基于無線通信的交通信號燈線路檢測及控制的研究為實現交通信號燈線路故障的無線通信檢測及控制提供了相關技術和方法。
1 總體設計
1.1 系統設計思路
基于無線通信的交通信號燈線路檢測及控制是利用霍爾電流傳感器來檢測交通信號燈線路中的驅動電流的方法來判斷線路的通斷,再通過無線通信及控制其交通信號燈[5]。
1.2 系統結構及組成
系統包括檢測終端和監控終端兩大部分,檢測終端硬件由電源轉換、單片機主控模塊、信號檢測、無線通信模塊、看門狗和信道編碼開關組成。監控終端硬件包括電源轉換、單片機主控模塊、霍爾電流傳感器檢測電路、無線通信模塊、電池管理控制模塊、信道編碼、方向編碼、看門狗[6]。
1.3 系統框架設計
無線通信的交通信號燈線路檢測及控制框架如圖1所示。
檢測終端實時讀取交通信號燈主控制機的各路口(以常規44路信號為例)燈態信息,并通過無線通信模塊廣播出去。監控終端信號檢測模塊通過霍爾電流傳感器檢測各路口信號燈線路電流狀態,無線通信模塊同步進入偵聽狀態獲取本路口相關燈態信息并反饋至檢測終端。如檢測到任意路口信號燈線路開路故障,即實時切換到無線通信控制狀態和備用蓄電池供電工作狀態[7](以一個路口的信號燈為例)。
1.4 系統硬件選型
檢測終端主控芯片采用ATmega128A車規級單片機(簡稱檢測主控芯片),該芯片是AVR 8位微處理器中配置最高單片機,抗干擾能力強,具有極高的穩定性能,采用先進的RISC結構,功耗低。監控終端主控芯片采用ATmega16-16AI(簡稱監控主控芯片),該芯片是一種低功耗微控制器,采用加強AVR基礎RISC架構,附有強大的指令集,數據吞吐量達1 MIPS/MHz。采用閉環霍爾電流傳感器,具有高精度、良好的線性、很強的電流過載能力和低功耗等特性[8]。
E32-868無線射頻模塊采用先進的LoRa擴頻技術,傳輸距離與穿透能力強;使用FEC前向糾錯算法,能主動糾正被干擾的數據包,使通信距離更遠,抗干擾能力更強,具有空中喚醒功能。
2 系統電路設計
2.1 檢測終端電路設計
檢測終端結構如圖2所示。
檢測終端電路設計采用AVR 8位微處理器芯片ATmega128A,該芯片廣泛應用于汽車電子、計算機外部設備、工業實時控制、通信設備等領域。其工作過程為:檢測主控芯片通過串行輸出移位寄存器讀取交通信號燈主控器控制信號,數據處理、編碼后經相關協議,通過無線射頻模塊將信號特征編碼廣播出去[9]。
2.2 監控終端電路設計
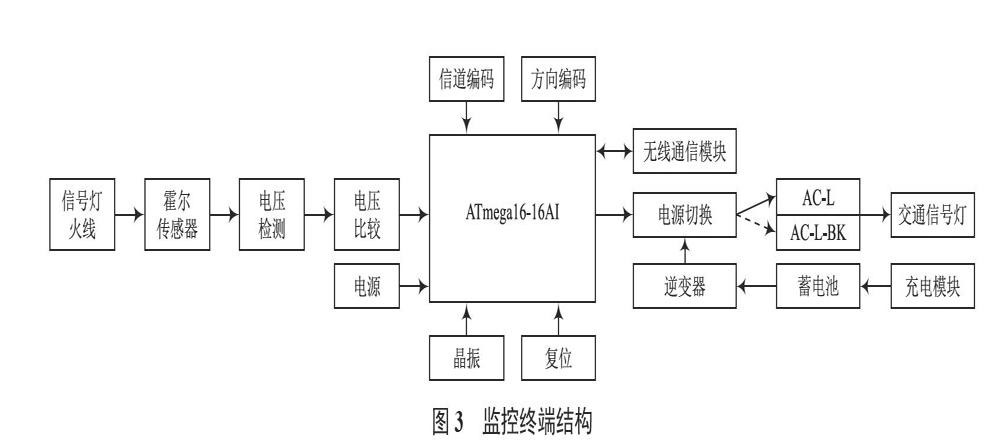
監控終端結構如圖3所示。
監控終端電路設計采用嵌入式微控制器,其工作過程:交通信號燈各路火線經穿過霍爾電流傳感器后產生感應電流并將其轉換為成精準的成比例的電壓輸出,經電壓檢測、電壓比較器確定是否產生信號(低電平“0”為燈滅,高電平“1”為燈亮),再將產生的信號送入主控單片機。同步主控單片機上電后獲取信道編碼、方向編碼數據,無線射頻模塊進入監聽狀態獲取本路口信息并判斷是否與交通信號主控機對應燈態信息一致[10],如一致則正常,否則為某信號燈火線開路,同步轉換為無線通信控制模式并切換由備用電源為信號燈正常供電,保障正常工作。
3 系統檢測控制及工作原理
3.1 系統檢測控制流程
系統檢測及控制流程如圖4所示。
在交通信號燈正常工作期間,系統處于低功耗工作狀態[11]。其流程包括以下步驟:
(1)交通信號燈主控機輸出各路口交通信號燈控制信號;
(2)檢測終端同步檢測信號機信號燈態信息,同步監測對應的交通信號燈的狀態信號;
(3)檢測終端對信號進行編碼,無線通信射頻輸出;
(4)監控測終端無線偵聽接收信息、解碼;
(5)比較判斷實時監測接收信息是否與檢測終端信號一致,若一致,則返回步驟(1),否則執行步驟(6);
(6)確定信號燈火線開路,切換至無線通信模式,備用電源供電模式。
3.2 檢測終端工作原理
將交通信號燈主控制機控制信號(以常規44路可控硅控制信號為例)引入檢測終端檢測電路,采用并入串出的方法檢測4個路口控制導通信號。當檢測到任意一路信號時,編碼相關協議,通過檢測終端無線射頻模塊將信號特征編碼廣播出去。4個路口監控終端接收到信號后,解析協議,判斷是否為當前路口控制信號,同時監控終端檢測對應路口信號燈是否導通,再將結果編碼后通過無線射頻信號發出,檢測終端接收即完成一個完整的檢測過程。運行邏輯:
(1)每秒檢測10次交通信號燈主控制機控制信號,同時將信號通過無線模塊廣播出去;
(2)檢測終端接收各路口監控終端返回數據。
3.3 監控終端工作原理
各路口監控終端上電后獲取信道編碼、方向編碼數據(撥碼開關設置),射頻模塊進入監聽狀態。無線射頻模塊接收到廣播信息進行解碼,獲取本路口相關信息。根據接收到的方向信號(直行、左轉、右轉、人行),將該方向的霍爾電流檢測信號引入主控芯片比較器,打開定時器,在一定時間內進行連續電壓比較,記錄比較結果。當比較結果大于設定閾值,即判斷該路交流信號正常;反之異常,同時將結果編碼后按方向編碼數據做對應的延時后發送回檢測終端,即完成一個信號檢測流程。運行邏輯:開機讀取信道編碼、方向編碼設置好無線模塊進入待機狀態;讀取分析接收的無線通信數據;判斷當前信道及方向信息是否一致;一致,則處于監測狀態;不一致,則判斷故障位置,控制繼電器將主火線切換到備用電源上。
4 結 語
本文通過對交通信號燈火線回路中電流的檢測,利用電流傳輸速度快和電氣原理的特性,提出了基于無線通信的交通信號燈線路檢測及控制的研究[12]。在交通信號燈正常工作情況下,系統處于低功耗的實時監測狀態,不會干擾交通信號燈的正常工作;如發生線路斷開故障,可通過無線通信實時定位到故障線路,并控制切換至備用電源為發生線路開路故障的交通信號燈供電,避免由此所帶來的交通擁堵、混亂,以及引發的交通事故。
在無線通信的交通信號燈線路檢測及控制系統中可以引入4G/5G通信技術,將各路口信號燈的狀態做到實時檢測和監控,并可以將線路故障信息實時上傳監控云平臺,實現遠程監控。同時可以引入GPS/BDS定位技術[13],更進一步地確定信號燈故障地理位置,實現城市智慧交通管理。
參考文獻
[1]劉志娟.基于無線傳感網的城市交通燈模糊控制系統設計[D].淮南:安徽理工大學,2014.
[2]王園園.基于無線傳感器的交通燈的遠程控制[J].物聯網技術,2018,8(1):89.
[3]焦海華.無線傳感器網絡在交通燈故障監測中的研究[D].昆明:昆明理工大學,2013.
[4]蔣清健.智能交通信號燈控制系統的分析與實現[J].福建電腦,2010,26(3):142.
[5]趙文.基于霍爾傳感器的電流監測及過流保護設計[J].儀表技術,2019(2):10-12.
[6]梁峰,趙金才,都曉鵬,等.基于ZigBee2007/PRO的智能家居無線組網設計[J].天津農學院學報,2016,23(3):47-50.
[7]羅洋坤.動力電池均衡充電控制方案分析與設計[J].蓄電池,2017,54(3):147-150.
[8]薛斌.主動磁力軸承的嵌入式控制系統設計與研究[D].武漢:武漢理工大學,2007.
[9]顧建凱,華彤天.一種基于無線射頻通信的溫度檢測系統設計[J].電子技術與軟件工程,2016(20):50.
[10]田博,陳分雄,郭星鋒.基于FPGA的多路無線信道監聽系統設計[J].電子技術應用,2014,40(5):87-89.
[11]李慶民,李華,徐立,等.系統可靠性結構識別方法[J].計算機應用,2014,34(11):3340-3343.
[12]鄒細勇,鮑軍民,胡琪,等.交通信號燈系統中的一種故障監控設計[J].計算機測量與控制,2012,20(8):2024-2027.
[13]羅洋坤.基于GPS和BP神經網絡的車輛定位預測研究[J].自動化應用,2018(3):88-90.
