適應于急傾斜煤層自動化綜采的關鍵控制技術研究與應用
2020-08-31 22:44:28毛迅許增亮陳均浩張曉波陳朝鮮
西部論叢 2020年8期
毛迅 許增亮 陳均浩 張曉波 陳朝鮮

摘 要:本文針對急傾斜煤層機械化開采工作面飛矸易傷人、損壞設備,工作面設備防滑、防倒難度大,采場空間對設備性能要求高的突出問題,以重慶能投渝新能源有限公司逢春煤礦為研究對象,研究適用于急傾斜煤層的關鍵控制技術。以一般電液控制系統為基礎,結合急傾斜煤層的采煤工藝和開采關鍵難題進行深化研究,總結出急傾斜煤層電液控制系統的關鍵在于設備的精準控制和系統的良態控制,并成功研制應用。
關鍵詞:急傾斜煤層;關鍵控制技術;精準控制
引 言
近年來隨著礦井開采強度的增加,部分地區煤炭資源迅速枯竭,為保證礦井的可持續發展,越來越多的礦區不得不考慮急傾斜煤層開采,如山東兗州、河北邢臺和開灤、安徽淮南、江蘇徐州以及貴州、四川、重慶、云南、新疆、甘肅、寧夏等省(區)的礦區。特別是在我國西部地區,經濟發展相對落后,煤炭資源的開采一直是其經濟來源的重要組成部分。據統計西部礦區中50%以上礦井有急傾斜煤層,由于主要采用炮采、風鎬落煤等方式開采,以單體支柱或柔性掩護支架進行支護,機械化程度低、工人勞動強度大,支護系統不能及時封閉作業空間、穩定性差,工作面安全可靠性差,煤炭產量低,用人多,開采方法相對落后。
進行急傾斜煤層機械化開采關鍵控制技術研究,對提高急傾斜煤層回采效率,實現礦井機械化、自動化具有重要價值,為急傾斜礦井安全生產提供可靠保障,對促進急傾斜煤層礦井的可持續發展具有重要意義。
1、關鍵控制技術的研究
1.1液壓支架精確控制防漏矸技術研究
在降柱拉架過程中,如果側護收的過多,會造成支架頂板與老塘的矸石大量的掉入支架內,砸壞設備,因此在該過程中需要嚴格精確控制支架側護收回量,由于在側護油缸上安裝行程傳感器較為困難,因此無法通過行程閉環控制,在此我們引入了模糊控制理念,由于油缸動作距離是靠液體填充或排出有關,因此通過控制進入或者放出油缸的液體量來控制活塞桿的距離,原理如下:
A、油缸伸出
假設油缸面積為a平方厘米,活塞桿的面積為b平方厘米,泵站的流量為L升/分,如果我們需要將活塞桿推出h厘米,設動作時間是t秒,由于液體介質主要成分是水,故我們認為1立方分米就為1升,則有下列算式:
t=(((a/100)*(h/10)/L)*60;
由于油缸的面積a、泵站的流量L、需要控制的距離h都已知,故通過上式可以計算出控制時間t,通過控制器軟件控制動作時間即可以控制油缸伸出距離。
B、油缸收回
假設油缸面積為a平方厘米,活塞桿的面積為b平方厘米,泵站的流量為L升/分,如果我們需要將活塞桿收回h厘米,設動作時間是t秒,由于液體介質主要成分是水,故我們認為1立方分米就為1升,則有下列算式:
t=((((a-b)/100)*(h/10))/L)*60;
由于油缸的面積a、活塞桿的面積b、泵站的流量L、需要控制的距離h都已知,故通過上式可以計算出控制時間t,通過控制器軟件控制動作時間即可以控制油缸伸出距離。
1.2液壓支架整體推移及防滑技術的自動控制研究
由于俯偽斜開采推移時,溜子始終有加速下移的趨勢,除液壓支架要有防下滑裝置外,控制程序的設計是關鍵。
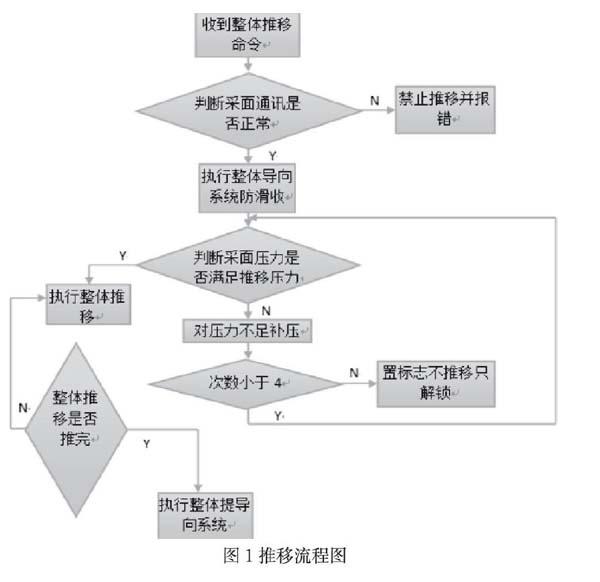
該套自動控制系統創新性地提出了溜子相對整體推移,即工作面執行整體推移時,從下往上依次推移,每臺支架推移的間隔啟動時間是200ms,最終實現整個工作面的整體推移。推移過程中,控制器程序不斷檢查推移行程傳感器,當推移行程傳感器的值達到目標值,則停止推移。推移完成后執行溜子整體上提功能,完成溜子上提,整個整體推移動作完成。整體推移過程中由順槽主控計算機通過現場總線收集全部動作支架的位移傳感器數據、動作時間數據,采用現代控制技術,計算推移油缸位置和動作速度,對全部支架的推移進行協調控制,避免出現局部過快或過慢造成設備卡阻,同時保證刮板運輸機溜槽始終處于合理狀態(溜槽彎曲度、溜槽間隙)。
在執行整體推移過程中,當按下整體推移健后,系統自動檢測每臺支架的壓力,如有支架立柱下腔壓力低于設定值時,則執行中的補壓功能(連續補壓不超過三次),補壓完成后支架推移雙向鎖依次從下到上執行解鎖功能,解鎖完成,開始執行從下往上執行整體推移,具體流程如1圖所示。
圖1推移流程圖
1.3紅外線煤機定位系統容錯控制技術研究
由于采煤機在工作面的位置是通過紅外定位系統定位,工作面控制器根據采煤機的位置和運動方向執行運動前方距滾筒兩架收防護板和伸縮梁、運行后方距滾筒兩架伸防護板和伸縮梁,因此位置信息至關重要,一旦位置信息有誤,可能會造成安全事故,故需對紅外位置做容錯功能。
①干擾容錯
根據目前的紅外定位原理,只要采樣口有大于紅外閥值的采樣值,則會認為是紅外位置,由于該系統是工作在高電壓等復雜電磁環境、工作面的電纜又很容易遭擠壓(造成絕緣不夠或者短路),都有可能造成紅外采樣口有采樣值,所以需要對干擾做容錯處理,具體如下:
煤機聯動是指支架或者溜子根據采煤機的位置而做出的動作。煤機聯動有(以逢春煤礦為例)采煤機運行前方自動收伸縮梁和收防護板(不防護)、采煤機運行后方自動伸伸縮梁和伸防護板(防護),設計原理如圖2所示:
圖2煤機容錯處理設計原理
根據上圖關系,采煤往機尾割煤,采煤機運行前方收防護板(不防護)的動作支架是:煤機位置9+機尾偏移數2+前方間隔數2,即14號支架收防護板(不防護);采煤機運行后方伸防護(起防護)和伸伸縮梁的動作支架是:煤機位置9-機頭偏移數4-后方間隔數2,即2號支架伸防護和伸伸縮梁。
a、采煤機位置不連續
如果某臺或某些臺紅外接收器故障,導致該臺控制器不能感受紅外發射器,從而采煤機位置不連續。
正常采煤機位置是(采煤機向機尾運動,假設起始位置是4):4、5、6…,這樣連續的;不連續的采煤機位置是(采煤機向機尾運動,假設起始位置是4):4、5、7、8…,這樣6號控制器就未接收到采煤機位置。
假設前方間隔數設為2如圖2所示,那么距采煤機運行前滾筒第3架支架開始動作(收防護板等),由于采煤機運行一臺支架大約需要30秒鐘,而收防護板和收伸縮梁只需10秒鐘,故可以距采煤機運行前方滾筒第2架支架動作(收防護板等),因此如果前方間隔數設為2,則可以距前滾筒第2、3架一起動作。故如果前方間隔數設為2,只準某臺控制器檢查不到煤機位置,不允許連續兩架或兩架以上檢查不出煤機位置。
b、采煤機位置跳變
如果工作面紅外電纜被擠壓,造成紅外電纜采樣線短路,使紅外傳感器有一個值,從而使控制器誤認為是采煤機的位置。如40號紅外電纜時短時斷,那么紅外位置就會在正確與40之間來回跳變。如果軟件不能判斷這種錯誤,則危害是十分嚴重的。因此需要對紅外位置的正確性作濾波處理,把不符合邏輯的、常理的數據去除掉。
初始位置確定:在每次煤機(采煤機與支架)聯動之前,需要先確定采煤機的初始位置,因為如果出現某根紅外電纜短路或者其他原因,則會出現采煤機位置不正確或者無法確定采煤機的正確位置。該位置可以通過順槽計算機、遙控器、任意一臺支架控制器輸入。
軟件濾波設計:支架與采煤機的參數:支架的寬度為1420mm(側護全收)至1680mm(側護全伸),采煤機最快采煤機速度為3米/分。我們假設支架最窄、采煤機割煤運行最快時,采煤機運行一個支架的時間(最快)為28.4s。
以采煤機初始輸入位置為基準Pj,采煤機當前位置P=Pj,尋得當前位置的時間為t;設采煤機下一個采煤機位置為Pn,尋得采煤機下一個位置的時間為tn;采煤機下一個位置Pn減當前位置P的絕對值為d;設采煤機運行方向前端間隔為dj,則設計如下:
如果dj=>d>1,且時間差tn-t小于(d-1)*28.4s,則采煤機位置Pn不正確;
如果d>dj,則采煤機位置Pn視為不正確;
如果d=1,且當前位置為基準位置Pj,則采煤機位置視為正確;如果d=1,且當前位置不為基準位置,且時間差tn-t大于等于28.4s,則采煤機位置正確;此時需將當前位置P和時間t更新為下一位置Pn和下一個時間tn;即P= Pn,t= tn;
如果d=1,當前位置不為基準位置,時間差tn-t小于28.4s,則采煤機位置視為不正確;
如果dj=>d>1,且時間差tn-t大于等于(d-1)*28.4s,則采煤位置視為正確,此時需將當前位置P和時間t更新為下一位置Pn和下一個時間tn;即P= Pn,t= tn;
如果采煤機位置在5分鐘內(暫定)沒有變化后,視為采煤機已停止,煤機聯動功能自動關閉,需要在聯動前,輸入采煤機的初始位置后啟動聯動功能(必需要煤機聯動開關開啟)。
c、轉向處理
通過紅外位置判斷采煤機運行方向,需要知道采煤機下一個位置,通過下一個位置與當前位置比較獲得,如果下一個位置Pn>P,則采煤機往機尾運行,如果下一個位置Pn 根據圖2原理,采煤機向機尾運行,位置在20時,收防護板(不防護)的支架是24、25;伸防護板(防護)和伸縮梁的支架是13、12;如果采煤機轉向,即向機頭運行,但是控制器要在19號才能感知采煤機已轉向,則收防護板和伸縮梁的支架是12、13,伸防護板和伸縮梁是24、25;這樣按照采煤機位置不連續原理來處理即可。 2、應用情況 2.1工作面概況 N2721工作面對應地表位于紅椿樹以東南198.10m,岡上以南263.38m,石包灣以西61.11m,木耳山以東北426.80m。N2721工作面井下位置:上順槽井下位于+460mN1平石門與+460mN2平石門之間,下順槽位于+380mN1抬高石門與+380mN2抬高石門之間。階段標高:+380m~+460m,工作面標高:392.57m~463.07m,工作面埋深為421.53m~581.94m。 工作面相鄰關系:上部為+523m~+460m階段隔離煤柱(垂高70m),上覆M6-3煤層已回采,下伏M11、M8煤層未回采,以南N2711工作面已回采,以北+460mN2731上順槽正在掘進,其余區域M7-2煤層未布置工作面。 2.2應用效果 急傾斜煤層機械化自動化開采關鍵控制技術的成功研制應用,增加了逢春煤礦原煤產量4.8萬噸/年,根據市場條件計算,平均電煤噸煤單價360元/t,公司新增經營收入1728萬元/年,綜采隊員工減少45人。 3、結語 急傾斜煤層綜合機械化開采關鍵控制技術的應用,極大的改善了工作面的勞動環境,大大降低了員工勞動強度,有效遏制了頂底板事故的發生,提高了工作面安全水平。新技術的使用,成功解決了急傾斜薄煤層俯偽斜工作面設備的防倒、防滑、防飛矸問題,綜合機械化開采大大減少了工作面人數,提高了工作面回采效率,實現了企業減人提效的目標。 為我國急傾斜綜采工作面的推廣應用提供了技術支撐,成功奠定了我國急傾斜煤層智能化開采的基礎,具有廣闊的市場應用前景。 參考文獻 [1] 陳朝鮮,沈大富.急傾斜薄煤層綜合機械化采煤技術研究與應用[j].煤礦機電.2017 [2] 漆興文.液壓支腿式柔性掩護支架在急傾斜中厚煤層開采中的應用研究,防護工程.2017 [3] 霍小寶.煤礦急傾斜煤層綜合機械化開采,科學技術創新.2018 作者簡介:毛迅(1985-),四川仁壽人,機械院副院長,從事綜采工藝和設備研究工作。