基于無人機智能航拍的礦山地質精確測量探究
2020-09-01 06:41:42溫宗超
世界有色金屬 2020年11期
溫宗超
(廣西中馬園區數字城市科技有限公司,廣西壯族自治區 欽州 535008)
礦產資源在社會經濟的快速發展中起到重要作用。但是,高強度、長時間的礦山開采造成了嚴重的地質環境問題[1]。在各地質種災害中,因采礦導致的地面塌陷數量最多,其次是地裂縫;因采礦導致的地面塌陷面積在幾十萬平方米以上。對此,準確地測量出礦山地質特征,建立地形數據庫,能夠為后續的礦山開采或地理信息/土地信息利用奠定良好的基礎[2]。研究國內外相關研究成果和文獻資料,發現礦山測量中多數使用基于GIS(地理信息系統)的測量方法,該測量方法過于依賴內部的數據庫,在實際定位過程中,受到歷史數據的影響,使定位結果出現較大的偏差,從而造成礦山地質測量不精確。
1 基于無人機智能航拍的礦山地質精確測量方法
1.1 檢驗正射影像圖比例尺
以測繪礦山地形為目的,使用專業的航空攝影機,利用無人機從空中垂直拍攝地面,獲得影像資料。飛行拍攝時,必須按照實際的要求飛行和拍攝才能獲得可用于攝影測量的航拍像片。
通過無人機智能航拍獲得的影像中存在像片傾斜和地面起伏引起的像點位移,由于航高引起的像片間比例尺和成圖比例尺不一致的問題。航拍影像如圖1所示。此時,運用數字攝影測量工作站生成該相對范圍內的數字高程模型,校正影像的傾斜誤差和投影誤差,生成各單模型的數字正射影像圖,將多個單模型的影像圖拼接在一起,經過圖像勻光處理后,依據測量的實際需求,裁剪出一定范圍的影像就是正射影像圖。
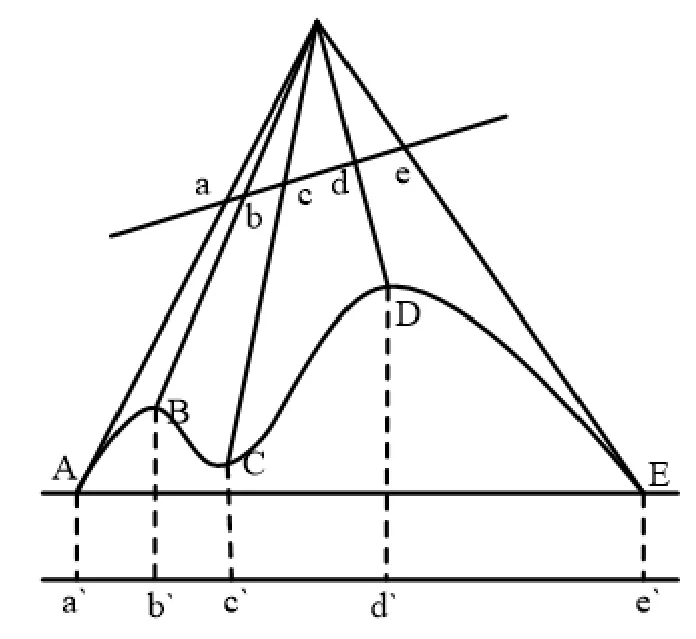
圖1 航拍影像示意圖
圖中顯示的a'~e'點表示地表位置,A~E點表示地表上地物的位置,a~e點表示拍攝的入射位置,從中可以看出拍攝的位置與地表并不平行,因此通過校正處理,得到正射影像圖。
獲得的航片經過后期處理后,在圖像上進行簡單的比例尺檢驗。利用已經正式出版的地形圖檢驗正射影像圖比例尺,已知地形圖比例尺的比例為1:x,影像圖比例尺為1:y,選取地形圖上典型地物點p1和p2,量取圖上距離為dx,影像圖上相同地物之間圖上距離為dy,在實際地形中地物之間的實際距離是一定的,此時可得到等式:

從等式中可知影像圖比例尺與地物點的關系,以等式為依據,依次選取若干個典型地物點,利用推導公式算出一系列的y值,將其作為縱軸,橫軸為次數,獲得分布曲線,若y值形成的點圍繞著一條固定數值線均勻分布,則這條數值線就是影像圖比例尺的分母,可從圖像上得到y值。若計算出的y值與影像圖的比例尺分母相符,說明檢驗成功。
1.2 解譯正射影像
從無人機航拍影像中獲取地質信息需要通過解譯的方式,在航拍正射影像上,拍攝的不同地物地質具有不同的內外特征,這些特征是識別地質地物的主要依據,在解譯過程中,需要將目標特征作為解譯標志,以此來實現航拍影像解譯。將通過航拍影像直接觀測到的特征作為直接解譯標志,如形狀、顏色、陰影和大小等,這些特征都是能夠直接反映地質的真實特征。在礦山地質測量方法中正射影像解譯標志說明如下表所示。
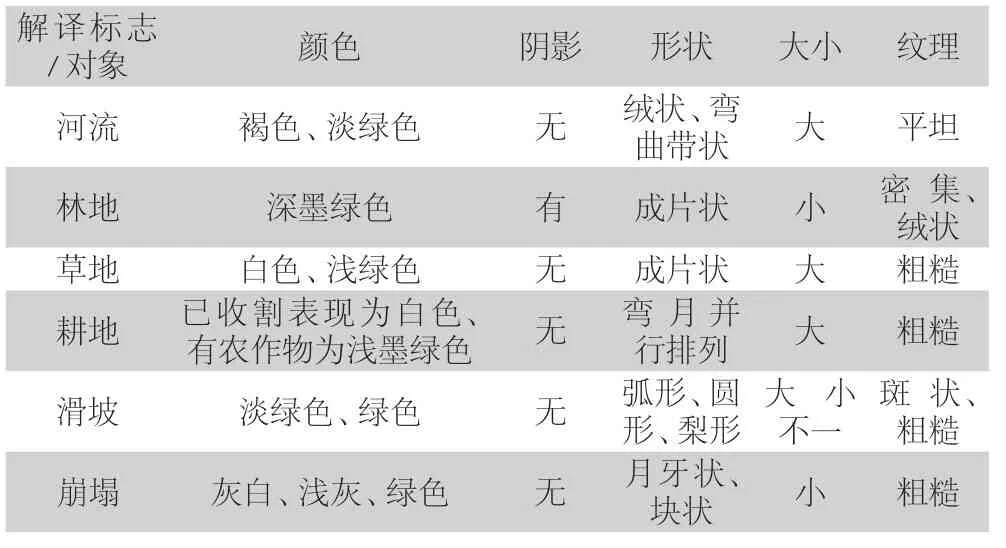
表1 礦山地貌解譯標志說明
基于表中的解譯標志,利用人工解譯和計算機解譯方式解譯航拍圖像,人工解譯主要利用人眼直接觀測影像或利用一些輔助設備,通過人的專業知識以及對地物的理解,達到解譯圖像的目的;計算機解譯主要利用模式識別技術與人工智能技術融合的方式,加上專家知識庫中的地質地物解釋、成像規律的分析,理解圖像達到解譯的目的。
1.3 測量地質信息
考慮礦山地質精確測量的實際需求,從航拍影像解譯過程中測量出地質信息。礦山的開采剝離了表層土壤和植被,是地表從植被過度到裸露的礦石造成的礦山環境的污染。研究航拍影像,可發現礦山中植被被破壞的區域清楚地呈現在影像上。因此,采用監督分類方法提取植被破壞的區域,選擇具有代表性的訓練區,從中獲得樣本選擇特征參數,建立判別函數,利用該函數對位置像元分類,通過分類最小距離測量出礦山中植被被破壞區域的面積。
礦山開采會引起滑坡現象,具有一定的空間特征,如滑坡體和拉張裂縫等。對于地面崩塌,主要以塌陷坑、塌陷盆地或滑坡坍塌的形式存在,受到空洞效應或陰影效應的影響,光線被吸收,在影像上呈現圓形或橢圓形的黑色陷坑,一般情況下,沒有與其連接的道路。計算其面積的前提是提取地面崩塌的邊界,通過圖像融合技術使航拍影像具有高的空間分辨率和多光譜特征,利用方向濾波一階導數的運算增強邊緣,使影像像元值均一的區域在輸出圖像中為0,對于像元值非均一的區域在輸出圖像中表現為亮色的邊緣,為準確提取地面崩塌邊界提供了支撐。
2 礦山地質精確測量方法實驗研究
在礦山地質精確測量方法的實驗研究中,考慮以往測量方法中存在的問題,設計對比實驗,以測量的坐標點平均誤差作為衡量標準,在相同的實驗條件下,驗證傳統的礦山地質測量方法與提出的礦山地質精確測量方法的實際水平。
2.1 實驗數據準備
選擇某礦山的露天采場作為實驗地點,測點工作直接在巖體上進行,獲得原位測量數據。測量的原始坐標數據如下所示。
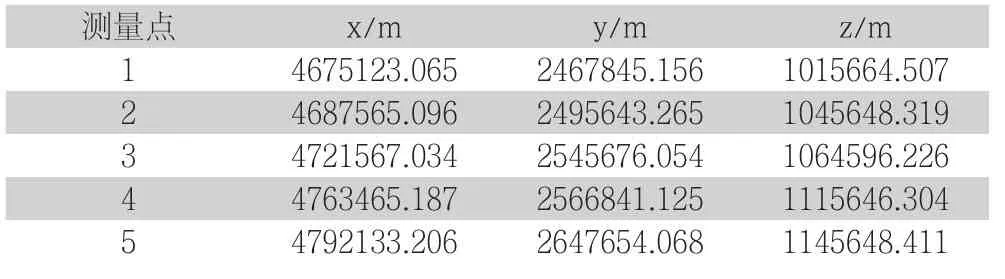
表2 測量點坐標系實際測量值
基于以上數據,使用不同的礦山地質測量方法獲得測量點的坐標位置,根據實驗結果對比分析。
2.2 實驗結果及分析
使用不同的礦山地質測量方法獲得的測量結果及誤差結果如下表所示。
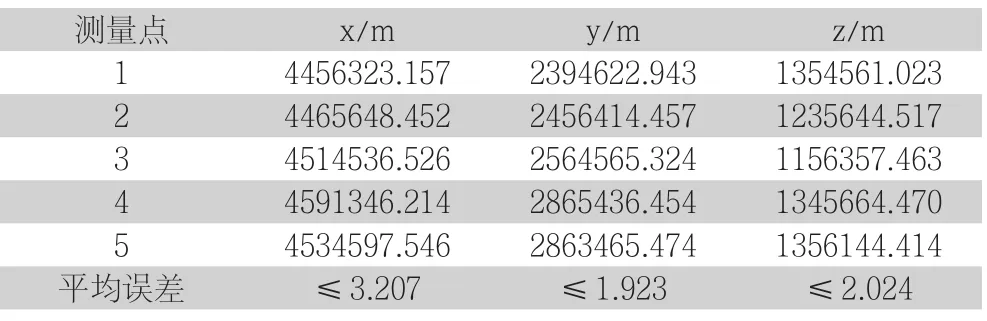
表3 傳統的測量方法實驗結果
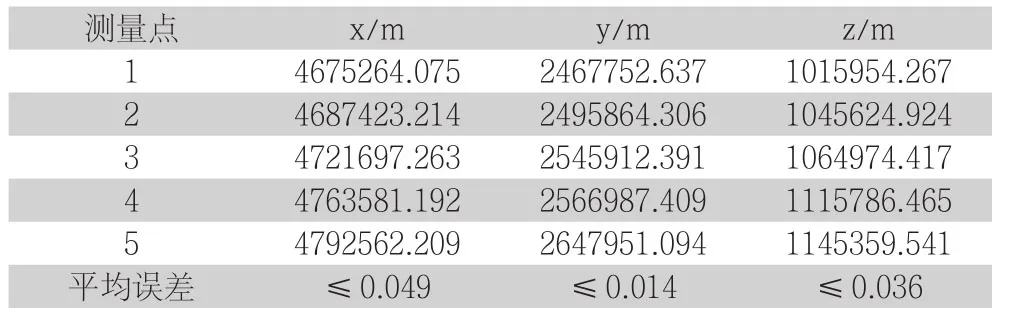
表4 提出的測量方法實驗結果
表中平均誤差是坐標系測量值與實際值計算得到的結果。對比觀察表中結果,對于相同的5個實驗點,表3中結果顯示,測量出的坐標系在x方向、y方向和z方向的平均誤差分別為3.207、1.923和2.024;表4中的結果顯示,測量出的坐標系在x方向、y方向和z方向的平均誤差分別為0.049、0.014和0.036。對比各個方向上的平均誤差可知,提出的基于無人機智能航拍的礦山地質精確測量方法在坐標測量中平均誤差低,說明該測量方法對礦山地質的定位十分準確,地質測量更為精準。
3 結束語
本研究以無人機智能航拍手段作為獲取礦山地質影像資料,以此為基礎,開展了航拍影像的處理,正射影像比例尺的檢驗以及影像解譯、地質測量等工作,設計的基于無人機智能航拍的礦山地質精確測量方法。在研究過程中,通過設計的對比實驗,驗證了設計的礦山地質測量方法測量誤差更小,說明該測量方法非常適合作為礦山地質分析與研究的數據源。
猜你喜歡
現代礦業(2021年12期)2022-01-17 07:30:32
河北地質(2021年2期)2021-08-21 02:43:50
神劍(2021年3期)2021-08-14 02:30:08
昆鋼科技(2021年2期)2021-07-22 07:47:06
礦產勘查(2020年7期)2020-12-25 02:43:42
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
