鑿巖臺車兩種常見平動臂優劣對比
2020-09-01 06:42:14唐響威
世界有色金屬 2020年11期
張 鎮,唐響威
(遼寧 沈陽 110001)
1 常見平動臂類型
1.1 雙三角平動臂
雙三角平動臂是鑿巖臺車常用的液壓平動臂之一,其理論依據可見參考文獻[1]、[2],此處不再過多敘述。此類型鉆臂完全平動,升降角度大,可實現極坐標及直角坐標定位,Atlas Copoc公司BUT系列鉆臂均屬此類。
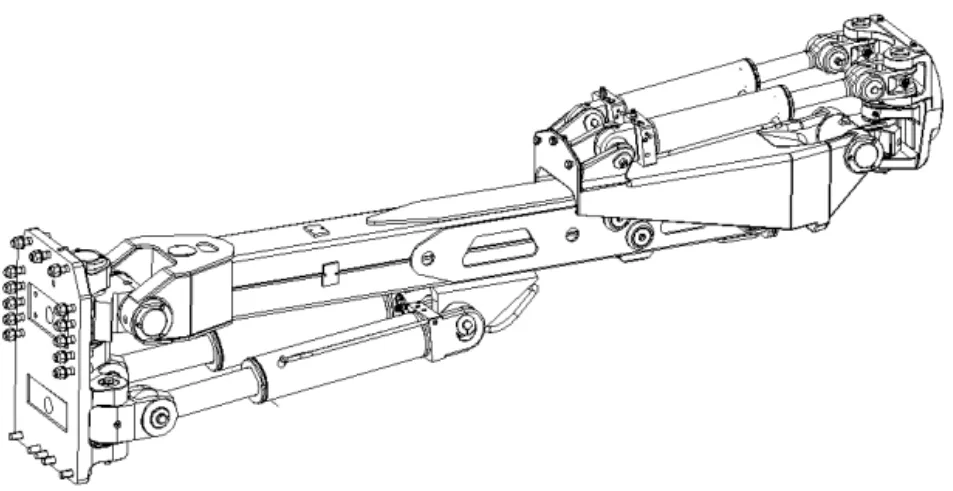
圖1 雙三角平動臂
1.2 近似平動臂
近似平動臂為直角坐標定位,存在一定的角度誤差。常見于Sandvik鑿巖機臺車,DD320、DD421、DD531、DT720臺車均使用此形式鉆臂。
此外,部分廠商如日本古河(FURUKAWA)將升降機構做成完全平動形式,擺臂機構做成近似平動,國內也有類似的產品。
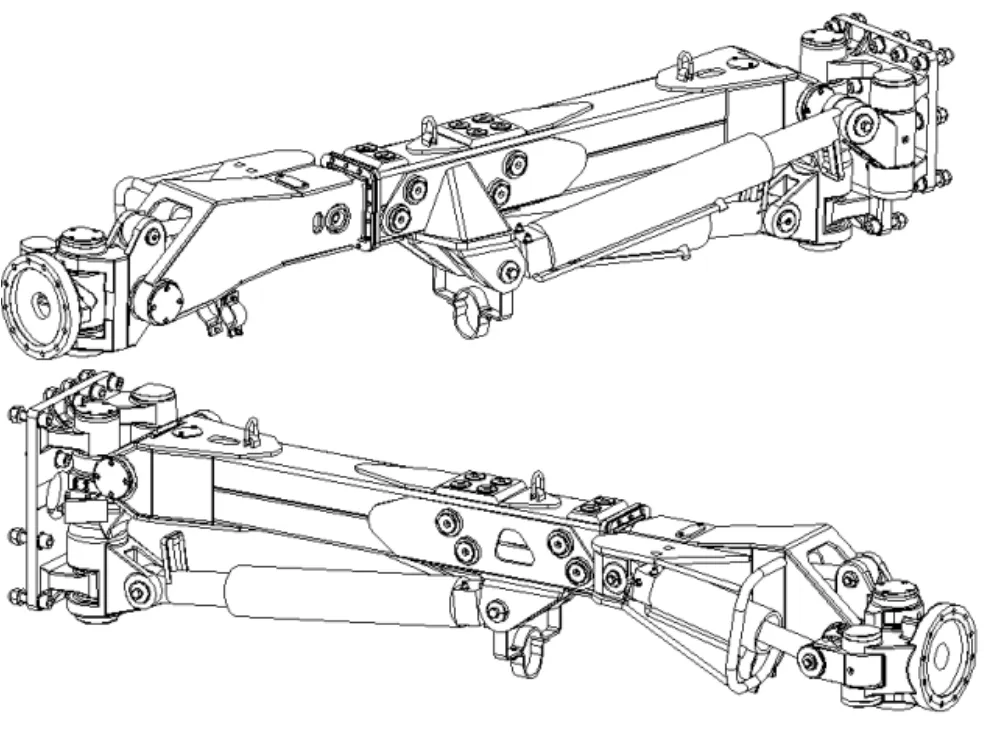
圖2 近似平動臂
2 平動臂關鍵技術參數及對比
2.1 平動臂關鍵技術參數
平動臂的終極設計目標是:在保證覆蓋面積的前提下,將推進器快速送至定位孔,同時盡可能降低平動臂長度、外形尺寸、質量、液壓系統成本;保證加工工藝性并提高通用性。
平動臂關鍵技術參數包括:覆蓋面積、升降角度、擺臂角度、伸縮行程、是否平動、自重、定位方式等。
2.2 兩種平動臂關鍵參數對比
通過對比Atlas Copoc、Sandvik同類型臺車平動臂,如S1D臺車BUT29鉆臂與DD311臺車SB40鉆臂參數(相同的鉆孔深度),可以更清楚的發現選擇不同形式的鉆臂,對整個產品關鍵參數的影響。
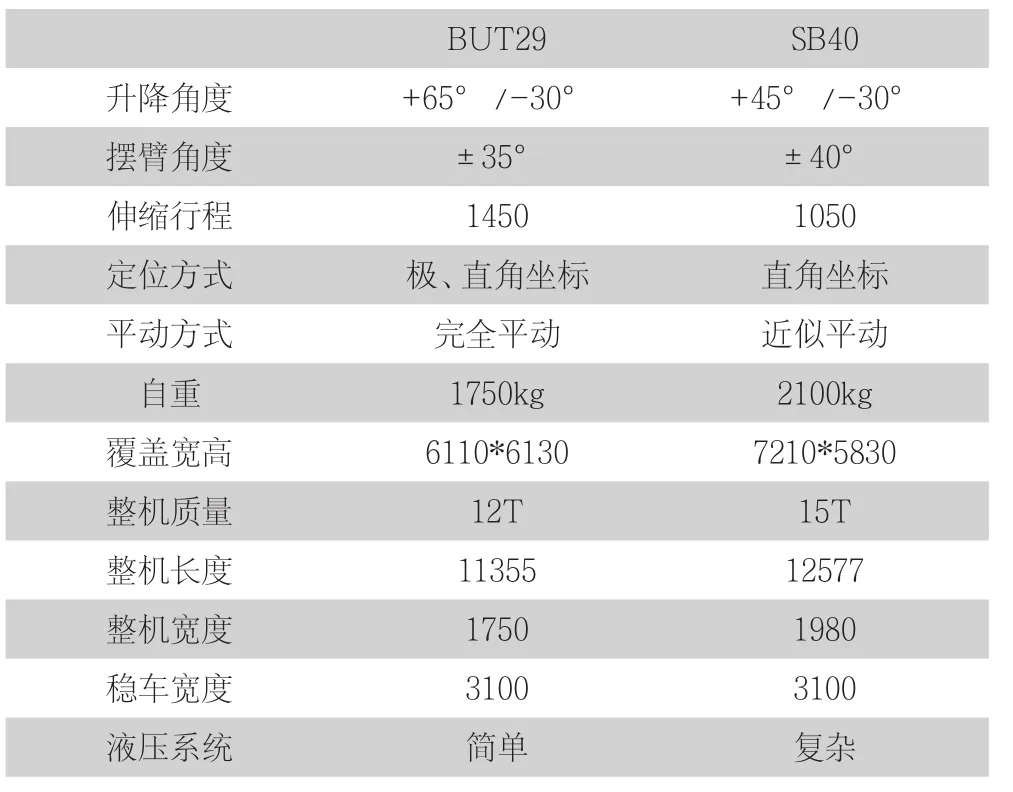
表1 參數對比
不難發現,在相同的適用斷面下,雙三角平動鉆臂(BUT29)絕大多數技術參數均要優于近似平動鉆臂(SB40)。
2.3 對比分析
(1)相同的平動臂長度,使用雙三角平動臂,通過提高升降角度,可以降低臂的整體長度。同樣的臂長,雙三角平動臂覆蓋高度要比近似平動臂高20%左右(圖3)。另外,通過長期實踐對比,近似平動臂因為絞點布置、空間限制及力矩要求的限制,升降角度難以突破45°。
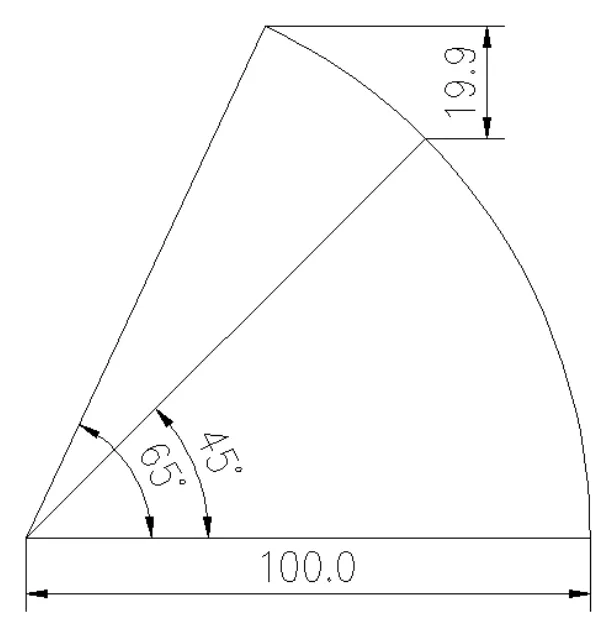
圖3 高度差示意圖
(2)在相同的鉆孔高度要求下,雙三角平動臂因為升降角度大,相對于近似平動臂可以剪短臂長。較短的臂長,也就意味著更短的整機長度,更加緊湊的結構,更輕的整機質量,更小的轉彎半徑,更低的成本,這一點對空間局促的礦山有非常大的意義。
(3)雙三角平動臂定位更為精準,近似平動臂由于結構限制,超過一定覆蓋范圍需要增加支撐臂油缸(如Sandvik早期的B26鉆臂),或者調整絞點位置,被迫使擺臂平動與升降平動相互關聯(如Sandvik的TB/SB系列鉆臂)。其后果就是鉆臂升降的同時,臂被擺臂油缸拉扯而發生偏移。而雙三角平動臂不會存在這樣的問題。
(4)近似平動臂液壓系統相對復雜。近似平動臂液壓系統需要特殊定制控制閥組來控制平動關系,并且額外增加兩個碰撞閥控制臂極限擺動角度。同時,平動臂升降油缸也需要做成特殊形式,這些都意味著增加成本,故障點增加,而雙三角平動臂并不存在這么多的問題。
(5)可選配的俯仰機構不同。近似平動臂多采用擺角俯仰機構(圖4),幾乎很難看到使用拐臂俯仰機構(圖5);雙三角平動臂多采用拐臂俯仰機構,但也可以使用擺角俯仰機構,如Atlas Copoc公司的Boomer M2雙臂臺車就是如此。
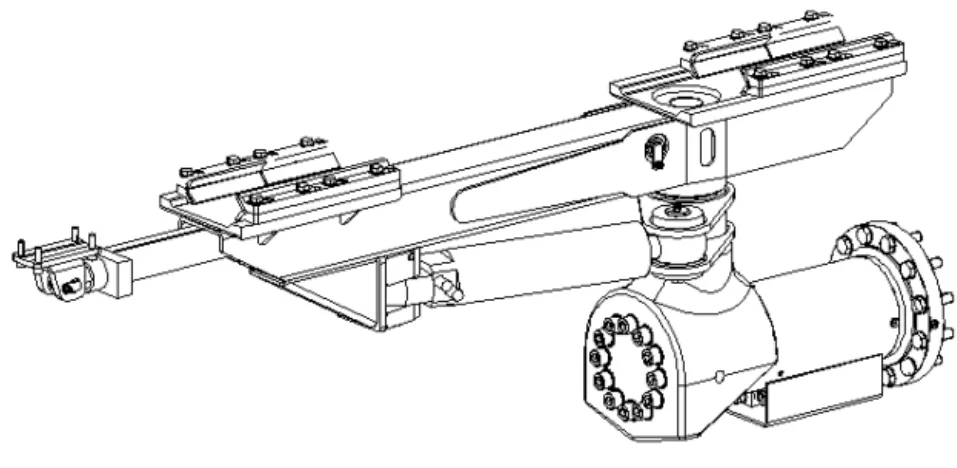
圖4 擺角俯仰機構
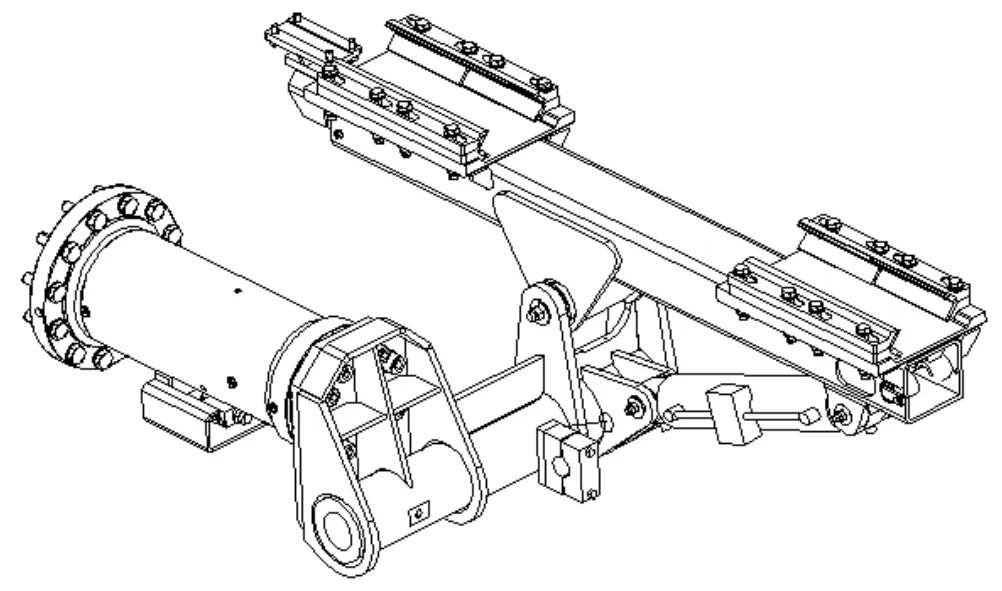
圖5 拐臂俯仰機構
3 結論
通過列舉對比鑿巖臺車兩種平動臂結構形式,說明了兩種臂的優缺點及應用;并闡述了因不同形式平動臂對整個鑿巖臺車產生的影響。對類似相近的結構設計具有一定參考價值及指導意義。
