一種全局搜索策略的鯨魚優化算法
2020-09-02 06:52:20白克強但志宏劉知貴
小型微型計算機系統 2020年9期
關鍵詞:優化
劉 磊,白克強,但志宏,張 松,劉知貴,3
1(西南科技大學 信息工程學院,四川 綿陽 621000)2(中國航發四川燃氣渦輪研究院,四川 綿陽 621703)3(西南科技大學 計算機科學與技術學院,四川 綿陽 621000)
E-mail:liuzhigui@swust.edu.cn
1 引 言
鯨魚優化算法(whale optimization algorithm,WOA)是2016年由Seyedali Mirjalili 教授[1]提出的一種群智能優化算法,通過模仿鯨魚在海洋中捕捉食物的搜尋過程,來尋找最優解.該算法具有結構簡單、自身參數少的特點,在多元函數求解方面比傳統粒子群優化算法[2]和遺傳算法[3]的速度更快、精度更高.在實際工程中的應用也開始增多,Khaled等[4]使用WOA對電力系統的調度進行優化,實現了對無功功率的最優調度.Yu等[5]將WOA應用在控制器的參數整定中,優化后的參數可以使控制系統具有更強的魯棒性.但是WOA也存在傳統群體優化算法的弊端,全局搜索能力不足,算法尋優精度低等問題.
為了解決傳統鯨魚優化算法的缺陷,Oliva等[6]提出一種混沌鯨魚優化算法,使用混沌策略指導鯨魚位置更新,一定程度避免了陷入局部最優解.牛培峰等[7]將反向學習策略運用到鯨魚位置初始化中,提升了算法的搜尋效率.目前已有大量改進的WOA算法提出,但大多的改進都沒考慮到螺旋更新方式對算法尋優的影響,以及算法在全局搜索能力上的不足.
針對上述問題,本文提出一種全局搜尋策略的鯨魚優化算法(global search whale optimization algorithm,GS-WOA).該算法采用變螺旋更新方式,增加鯨魚尋優過程中的螺旋路徑選擇;使用自適應權重改變鯨魚位置更新時的速度,動態調整權值來提升算法后期的收斂速度;通過最優鄰域擾動的策略,來避免算法的早熟現象.為檢驗GS-WOA的尋優性能,在多個測試函數上進行仿真實驗,結果表明了該算法具有更高的尋優精度和更快的收斂速度.
2 鯨魚優化算法
鯨魚自身體積比較龐大,在海里移動相對來說不是特別靈活,想要捕獲更多的小魚就需要一種獨特的群體合作的方式,找到最多小魚群的位置.鯨魚的群體捕捉過程如圖1所示,鯨魚通過向上螺旋靠近目標,并逐漸縮小包圍圈,最終到達目標魚群的位置.根據捕食特點,WOA包括三種位置更新方式:包圍獵物、旋轉搜尋以及隨機搜尋.

圖1 捕獵示意圖Fig.1 Hunting diagram
2.1 包圍獵物
鯨魚將目前搜尋到的獵物信息共享,然后鯨魚向當前群體中最接近獵物的那頭鯨魚靠近,逐漸收縮整個鯨魚群的包圍圈,實現對獵物的包圍.該環節鯨魚位置更新公式為:
(1)
式中:t為迭代搜尋次數;X為鯨魚位置;X*是全局最優位置;A和C為系數矩陣,表達式為:
(2)
式中:r1和r2是[0,1]均勻分布隨機數;t為迭代次數;tmax為最大迭代次數;a為收斂因子,從2到0線性遞減.
2.2 旋轉搜尋
鯨魚搜尋獵物是螺旋向上,慢慢靠近目標的方式,螺旋搜尋的表達式為:
(3)
式中:b為常數,可以改變螺旋的形狀;l為[-1,1]均勻分布隨機數.
鯨魚在螺旋搜尋獵物的時候,還會收縮包圍圈,所以為了模擬這種行為,需要包圍獵物和螺旋搜尋同步進行.更新公式為:
(4)
式中:p為[0,1]之間均分布隨機數.
2.3 隨機搜尋
為了提升鯨魚的全局搜索能力,讓鯨魚在搜尋獵物時具有一定的隨機性,增加鯨魚群的搜尋范圍.
當系數|A|≥1時,說明該鯨魚在收縮包圍圈外,選擇隨機搜尋方式;當系數|A|<1時,說明該鯨魚在收縮包圍圈內,選擇螺旋包圍搜尋方式.隨機搜尋更新公式為:
X(t+1)=Xrand(t)-A·|C·Xrand(t)-X(t)|
(5)
式中:Xrand為一個隨機的鯨魚位置.
以上三種搜索方式的結合構成鯨魚優化算法.
3 改進的鯨魚優化算法
通過分析發現,鯨魚優化算法在收斂速度和全局搜索能力上還存在一定缺陷.根據標準鯨魚位置更新方式,引入三種改進方式構成全局搜索策略提升算法的尋優能力.
3.1 自適應權重
受粒子群優化算法的啟發,在鯨魚的位置更新中加入一個隨迭代次數變化的慣性權重w.在算法搜索的前期,削弱最優鯨魚位置對當前個體位置調整的影響,提升算法在前期的全局搜索能力.隨著迭代次數的增加,逐漸提升最優鯨魚位置的影響力,使得其他鯨魚能夠快速收斂到最優鯨魚的位置,提升整個算法的收斂速度.根據鯨魚優化算法中更新次數的變化,選用迭代次數t構成的自適應慣性權值如下:
(6)
這樣的慣性權值w具有一種在[0,1]之間非線性變化的屬性,由于cos函數在[0,π/2]之間的變化特性,使得權值在算法初期較小,但變化速度稍快;在算法后期其值較大,但變化速度會減緩,這樣可以充分保證算法收斂性.改進后的鯨魚優化算法位置更新公式為:
(7)
X(t+1)=w(t)Xrand(t)-A·|C·Xrand(t)-X(t)|
(8)
在引入自適應權重之后的位置更新,會根據迭代次數的增加,動態調節權重大小,使得最優鯨魚位置X*(t)在不同時刻對鯨魚個體的指導不同.隨迭代次數的增加,鯨魚群的會集中向最優位置方向靠近,并且此時權值較大會使鯨魚位置移動速度加快,進而加快算法收斂速度.
3.2 變螺旋位置更新
鯨魚在搜尋獵物的時候,會根據目標位置與自身位置之
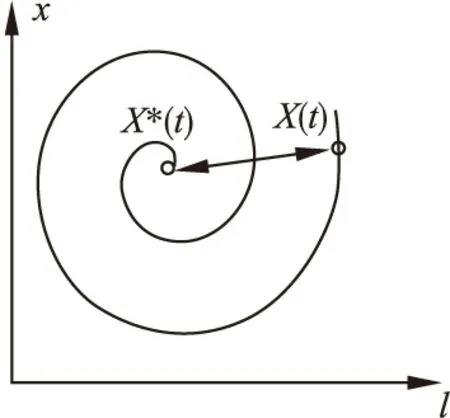
圖2 螺旋更新位置Fig.2 Spiral update position
間的螺旋形狀,調整每次位置更新的移動距離,如圖2所示.在螺旋搜尋模型式(3)中,b是控制螺旋形狀的常數,該參數一般設置為常數,每次位置更新按照不同的螺旋弧度進行速度調節.但是b設置為常值會導致鯨魚在搜尋獵物時的螺旋移動方式過于單一,每次都是按照固定的螺旋線靠近目標,極易陷入局部最優解的誤區,削弱算法全局搜尋能力.
針對該問題,為了使鯨魚能夠開發更多樣的搜索路徑進行位置更新,引入變螺旋搜尋的思想,將參數b設計為隨迭代次數改變的變量,動態調整鯨魚搜尋時的螺旋形狀,增加鯨魚對未知區域的探索能力,進而提升算法全局搜索能力.結合自適應權值后,新的螺旋位置更新公式如下:
(9)
參數b是根據螺旋線的數學模型進行設計的,在原有螺旋線模型的基礎上,通過引入迭代次數,動態調整螺旋形狀.這樣設計的參數b會隨迭代次數增加,使螺旋形狀從大到小的變化.在算法前期鯨魚以較大的螺旋形狀搜尋目標,鯨魚盡可能多的去探索全局最優解,提升算法的全局最優搜尋能力;在算法后期鯨魚以小螺旋形狀搜尋目標,提升算法的尋優精度.
3.3 最優鄰域擾動
鯨魚在更新位置的時候,一般都是以當前最優位置作為本次迭代的目標.在整個迭代環節中,最優位置只有在出現優于它的位置時才會更新,所以總的更新次數不多,導致算法搜尋效率不高.針對此,引入最優鄰域擾動策略,將最優位置的附近隨機搜索一遍,找到一個更佳的全局值,這樣不僅可以提升算法的收斂速度,而且還能避免算法出現早熟.
最優位置產生隨機擾動,增加其對附近空間的搜索,鄰域擾動公式為:
(10)

對于生成的鄰域位置,采用貪婪的策略判斷是否保留,公式如下:
(11)
式中:f(x)為x的位置適應值.如果生成的位置比原位置好,則將其與原位置替換,使其成為全局最優.反之,最優位置保持不變.
3.4 算法流程
改進鯨魚優化算法的流程如表1所示.
3.5 算法復雜度分析
時間復雜度可以作為評判一個算法運算量的重要手段.在鯨魚優化算法中,設算法中鯨魚的規模為N,最大迭代次數為T,問題維度為D.可以得到WOA的時間復雜度為O(N*T*D).而GS-WOA在原有算法的基礎上引入三種改進策略,從該算法流程可以看出,在加入自適應權重和變螺旋更新策略未增加循環次數,算法時間復雜度為O(N*T*D),而加入最優鄰域擾動給算法外圍增加了一次遍歷種群的循環,增加了O(N*T)的運算量.對于整個算法的時間復雜度來說,增加O(N*T)的運算量不會對算法造成太大計算負擔,總體來說GS-WOA的時間復雜度與標準WOA時間復雜度持平.

表1 算法流程Table 1 Algorithm flow
空間復雜度用來評判一個算法對內存空間的需求情況.在這里空間復雜度主要由鯨魚的規模和所需求解問題的維數決定,GS-WOA和WOA具有相同的空間復雜度O(N*D).
4 算法性能測試
4.1 測試函數及性能指標
為了測試GS-WOA算法的尋優能力,在文獻[1]中選擇了11個基準函數.其函數特性如表2所示.算法尋優精度為實際尋得最優解與理論最優解之間的誤差絕對值,本文采用兩個評價指標:尋優精度的平均值(Ave)和標準差(Std).其計算公式如下:
(12)
式中:Xopt為理論最優解;N為總的實驗次數.
4.2 優化算法的性能分析
使用GS-WOA算法在11個基準函數上進行測試.維數Dim分為30和200,并將其與GWO[8]、WOA和SM-WOA[9]算法進行比較,對比4種算法的性能指標.4種算法的參數設置相同:規模N為30;最大迭代次數為500.4種算法均單獨測試30次,得到優化結果的平均精度及其標準差如表3所示,其中黑色粗體為較優結果.
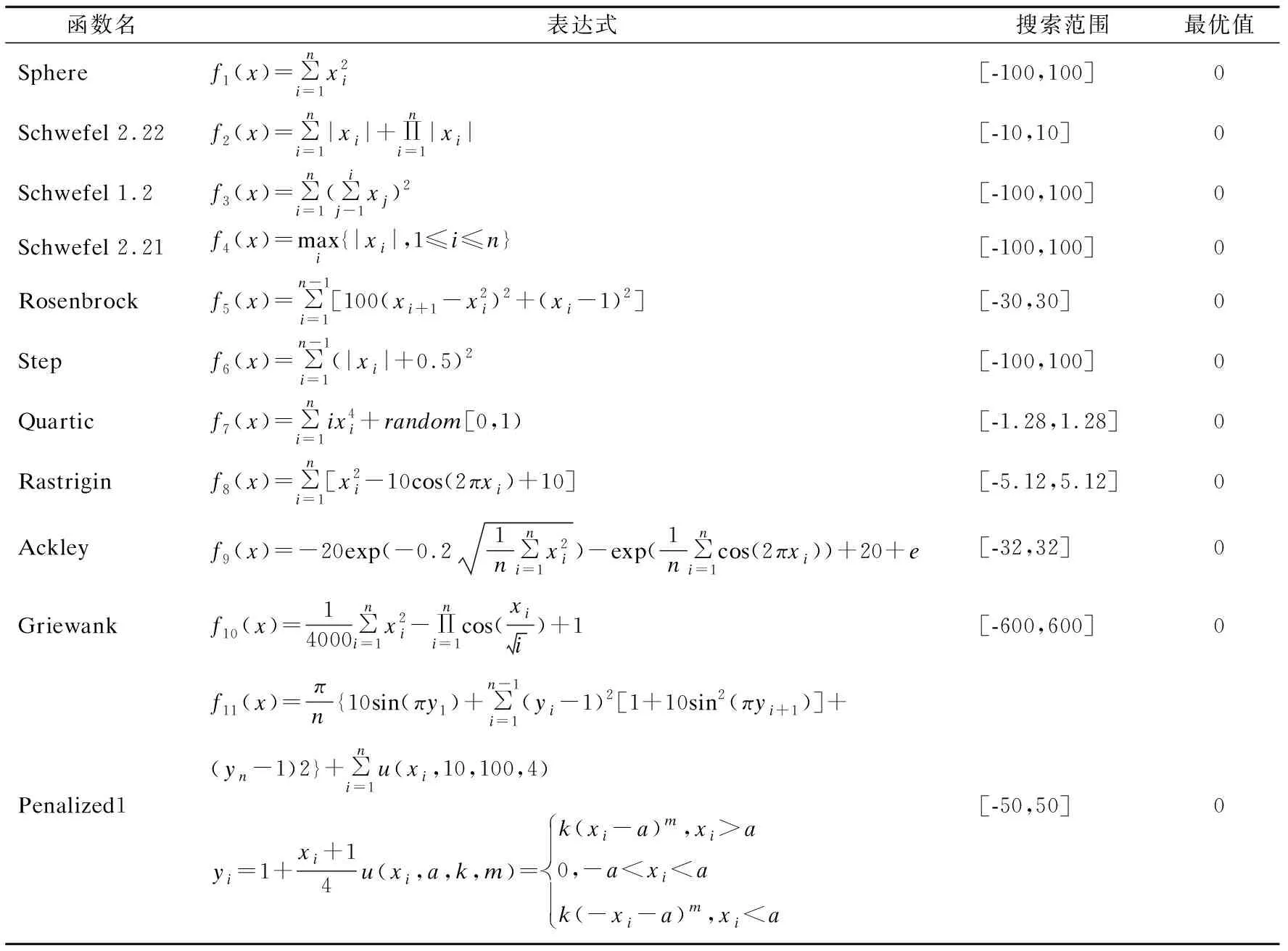
表2 基準測試函數Table 2 Benchmark function

表3 尋優指標對比Table 3 Comparison of optimization indexes
從表3中可知,GWO算法的尋優精度普遍較低,只有在測試函數f3、f4上優于WOA算法.SM-WOA算法在尋優精度上面有所提升,但缺乏全局搜索能力,在函數f5、f6和f11上,算法的尋得的最優解和理論值有一定偏差.GS-WOA算法在這些測試函數上的尋優精度都優于其余對比算法,并且標準差相對較低,表明算法較為穩定,其中對函數f1、f3、f8、f10的求解,可以搜尋到理論最優值.當問題維數上升后,所有優化算法的尋優精度都有所降低,但GS-WOA算法仍然保持了較高的尋優精度和穩定性.
圖3為WOA、MS-WOA、GWO和GS-WOA算法在基準測試函數上求解的收斂曲線對比圖.
從圖3中可以看出,GS-WOA算法的收斂速度普遍要比其余3種算法快,并且尋優精度更高.由圖中(e)、(f)、(g)和(k)可以知,在函數f5、f6、f7和f11上,GWO、WOA和MS-WOA都陷入的局部最優解,而GS-WOA由于變螺旋更新方式提升了算法全局搜索能力,使得算法可以突破局部最優的限制尋找到新的全局最優解.總體來說,GS-WOA算法具有更高的尋優精度和求解能力.

圖3 收斂曲線對比圖Fig.3 Convergence curve comparison diagram
為了驗證GS-WOA改進策略的有效性,將其與CWOA[10]、W-SA-WOA[11]和IWOA[12]進行對比,基準測試函數任選擇之前的11個,鯨魚規模為30,最大迭代為500次,獨立運行30次實驗,并引用文獻[10-12]中的一些數據,對比分析各算法性能指標,結果如表4所示(“-”表示參考算法未做該項實驗),較優結果已用粗體標出.

表4 與其他改進算法的對比Table 4 Comparison with other improved algorithms
由表4可知,在已給出的測試函數上,GS-WOA的尋優精度優于CWOA、W-SA-WOA和IWOA三種算法,并且具有較高的穩定性.
綜上所述,GS-WOA在求解復雜函數的最優解時,比傳統WOA的求解精度高很多,與目前改進的WOA算法相比,GS-WOA能找到更好的全局最優解.
5 總 結
鯨魚優化算法是一種具有仿生尋優的智能優化算法,但是在處理復雜函數優化問題時仍存在一些局限性.本文分析了標準WOA的尋優過程,根據目前位置更新存在的問題,提出了相應的解決方法.為了防止WOA算法易陷入局部最優解,加入自適應權值、變螺旋更新和最優鄰域擾動策略,調整鯨魚位置更新的方式,動態調節鯨魚向目標物靠近的速度,進而提升整個算法的全局搜索能力.通過在基準函數上的測試,結果表明了GS-WOA算法能夠突破局部最優解的限制,獲得更高的求解精度.相比于其他改進算法,GS-WOA具備更強的全局搜尋能力,證明了本文針對WOA提出的三種改進策略的有效性.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
