基于運動仿真的自動變速器行星齒輪構造傳動分析
2020-09-02 06:43:06謝佺杏蔣紹軍
中小企業管理與科技·上旬刊 2020年7期
謝佺杏 蔣紹軍


【摘? 要】針對自動變速器行星齒輪構造傳動分析復雜的特點,論文提出了一種基于運動仿真的分析方法,并將分析結果的傳動比與公式法計算結果進行對比,確認了該方法的有效性,為類似結構的傳動分析提供了參考思路。
【Abstract】In view of the complexity of transmission analysis of automatic transmission's planetary gear structure, a method based on motion simulation is presented in this paper, and the transmission ratio of the analysis results and the calculation results of formula method is compared to confirm the effectiveness of the method, and provide a reference for transmission analysis of similar structures.
【關鍵詞】行星齒輪;自動變速器;傳動比;運動仿真
【Keywords】planetary gear; automatic transmission; transmission ratio; motion simulation
【中圖分類號】TH132.41? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?【文獻標志碼】A? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?【文章編號】1673-1069(2020)07-0192-02
1 引言
行星齒輪系統是自動變速器(AT)中的關鍵傳動結構。隨著CAE技術的發展,各種通用的CAE軟件逐漸完善了各自的運動仿真模塊,其應用的廣度與深度隨之提升。但在進行自動變速器行星輪系的傳動分析時,多以專用分析軟件或傳統分析方法為主,極少看到借助通用CAE軟件進行分析。主要原因是行星齒輪系統過于復雜,而通用軟件進行約束設置時的自由度不夠高,導致某些約束關系較難實現,或者需要通過間接的方式來實現,初次使用通用CAE軟件分析的門檻較高。
下面以較簡單的辛普森式自動變速器為例,介紹如何通過運動傳真對其進行傳動分析,具體操作軟件為Siemens PLM Software公司出品的UG。
2 辛普森式自動變速器簡介
辛普森式行星齒輪機構由兩個內嚙合式單排行星齒輪機構組合而成,其結構特點是:前后兩個行星排的太陽輪連接為一體,稱為前后太陽輪組件,即圖1中的組件a;前一個行星排的行星架和后一個行星排的齒圈連接為一體,為前行星架和后齒圈組件,同時連接到本機構的輸出軸,即圖1中的組件2;其他則按一般的行星齒輪系統結構關系連接。其中各擋位的傳動路線如下:
一擋:離合器C1接合,單向離合器Fw鎖止,相當于制動器B1起作用。二擋:離合器C1接合,制動器B1鎖止,此時動力通過前行星排輸出。三擋:離合器C1和C2接合,相當于整個行星齒輪機構連接成為一體。倒擋:離合器C2接合,制動器B2鎖止,此時動力通過后行星排輸出。
為便于后續建模及仿真分析,現明確各齒輪齒數,并通過公式法計算出各擋具體傳動比(見表1),簡便起見,前后行星排選用相同的齒數值。
3 建模
首先根據圖1的結構,在UG中完成以下各主要零件的建模。由于在UG中設置齒輪副傳動時,兩齒輪必須相對于同一個嚙合連桿旋轉,而每個運動副只能存在1個嚙合連桿,因此,需要先將前后太陽輪組件分成2個太陽輪,再通過間接的手段進行連接,實現2個太陽之間轉速的一致。
建模完成后,通過UG裝配功能模塊,將各零件按相應的位置關系裝配起來,最終效果如圖8所示。
4 運動仿真分析
4.1 連桿設置
進入UG的運動仿真模塊,第一步先把所有參與運動的零件設置為桿件(Links),質量屬性保留默認/自動即可,其他參數留空。注意不要勾選“固定連桿”選項,否則零件將無法運動。
4.2 旋轉副設置
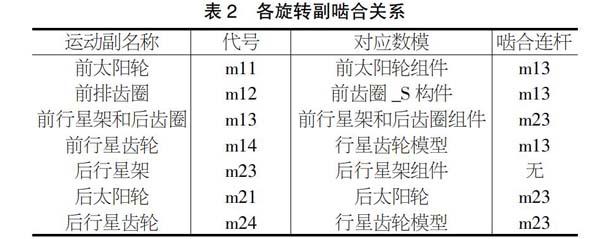
完成好連桿設置后,接下來需要給每個連桿指定具體的運動模式,即指定運動副(Joints)類型。在行星齒輪系統中,各連桿的工作模式均為轉動,即對應的運動副均應選擇旋轉副。各旋轉副嚙合關系如表2所示。
4.3? 齒輪副及2-3傳動副設置
具體齒輪副及運動副設置需要在旋轉副的基本上進行,而且UG中行星輪系各齒輪的顯示轉速為相對行星架的轉速,這就意味著設置齒輪副傳動比時,不需要考慮行星架公轉的影響,直接使用兩齒輪的齒數比即可。
2-3傳動副是本辛普森式行星齒輪機構能正常運行的關鍵。為了保證前后太陽的絕對轉速相同,可以給兩太陽輪加上傳動副,即模擬傳動比為1的帶傳動。特別注意,由于兩太陽輪的默認轉速是相對于各自行星架的轉速,而實際需要的是其絕對轉速相等,所以在設置傳動副的比值,需要通過換算消除行星架轉速的影響,圖9為一擋時換算后的前后太陽輪傳動比。另外,同一行星輪系的多個行星齒輪之間也可以直接通過2-3傳動副連接。
4.4 驅動及解算
在進行驅動設置時,應優先把驅動轉速設置在兩行星架上,否則會出現計算異常的情況。按各個擋位的傳動路線對仿真模型進行約束驅動,即受制動器約束的組件設置為轉速為0,再給作為輸出端的前行星架和后齒圈指定默認轉速后進行求解,系統即會自動解算出其他零件的轉速。可根據不同擋位的特性,建立不同的仿真文件,以完成各個擋位的分析。分析完畢進行圖表輸出時,注意根據不同擋位選擇合適位置的測量點,并且應測量其相對絕對坐標系的轉速,最后各擋位解算結果匯總如表3所示。其中負值的轉速是指其轉速方向與參考坐標系方向相反,另外n11和n21測量點主要是為驗證兩太陽輪的絕對轉速是否一致。通過對比前面表1的公式法計算結果,可得知運動仿真確實與實際保持一致。
5 結論
由于通用CAE軟件自身功能的限制,在自動變速器行星輪系的傳動分析時,確實存在某些約束關系較難實現,或者需要通過間接的方式來實現的情況。但其也有一些自身的特點:①完成了某種特定結構自動變速器的模擬后,如果再分析同類結構的變速器,只需修改變動的參數,即可高效快速進行求解,一勞永逸。②運動仿真可生成所分析機構的運行動畫,相對其他方法而言,更加直觀形象。還可用作教學視頻或成果展示材料。③隨著CAE技術的進度,軟件功能會更加強大,操作也會更加簡單方便,即本分析方法的使用難度會逐步降低,這也是其他分析方法所不具備的。
【參考文獻】
【1】郭兆松.豐田U760E型自動變速器行星齒輪變速機構的傳動分析[J].拖拉機與農用運輸車,2016,43(04):20-24.
【2】成偉華.自動變速器行星排速比計算方法對比研究[J].自動化與信息工程,2016,37(03):40-43.
