基于Qt的無人機(jī)監(jiān)視雷達(dá)顯控終端設(shè)計(jì)與實(shí)現(xiàn)
2020-09-03 02:25:52陳麗朝
無線互聯(lián)科技 2020年12期
陳麗朝
(成都中電錦江信息產(chǎn)業(yè)有限公司,四川 成都 610000)
雷達(dá)(Radiodetectionandranging,Radar)是指無線電探測與測距,即利用無線電技術(shù)進(jìn)行目標(biāo)探測與跟蹤[1],誕生于20世紀(jì)30年代,經(jīng)過初步研究與發(fā)展,二戰(zhàn)期間正式投入軍方使用。由于在戰(zhàn)爭中的突出表現(xiàn),人們把它譽(yù)為“第二次世界大戰(zhàn)的天之驕子”[2]。此后,雷達(dá)技術(shù)受到世界各國的高度關(guān)注,在體制、理論、方法、技術(shù)和應(yīng)用等方面都已得到迅猛的發(fā)展。雷達(dá)顯示與控制終端作為雷達(dá)系統(tǒng)不可或缺的重要組成部分,是雷達(dá)使用者與雷達(dá)系統(tǒng)之間的交互平臺[3]。
當(dāng)下,無人機(jī)監(jiān)視雷達(dá)顯控終端的信息顯示、軟件界面和操控性能受到高度重視。借鑒大型雷達(dá)顯控終端的信息顯示及控制模式,用當(dāng)今計(jì)算機(jī)、軟件設(shè)計(jì)和雷達(dá)數(shù)據(jù)處理等方面的先進(jìn)技術(shù)成果,充分利用雷達(dá)信號處理系統(tǒng)提供的各種目標(biāo)信息,研發(fā)具有領(lǐng)先水平的雷達(dá)顯控終端具有重要的意義。
1 雷達(dá)顯控終端的系統(tǒng)設(shè)計(jì)方案
雷達(dá)顯控終端的作用是實(shí)時顯示雷達(dá)主機(jī)中信號處理板處理后的雷達(dá)目標(biāo)信息、雷達(dá)系統(tǒng)狀態(tài)信息、紅外攝像頭數(shù)據(jù),通過人機(jī)交互界面設(shè)置雷達(dá)工作參數(shù)和紅外控制信號,通過網(wǎng)口發(fā)送至雷達(dá)主機(jī),同時將要實(shí)施打擊的無人機(jī)目標(biāo)參數(shù)發(fā)送至精確打擊系統(tǒng)完成實(shí)時打擊。軟件通過Qt平臺實(shí)現(xiàn),設(shè)計(jì)使用Qt 5.9.0版本,代碼編輯使用Qt Creator 4.3.1版本。
1.1 軟件功能需求
從顯控終端的功能需求進(jìn)行分析,將顯控終端系統(tǒng)大致分為以下幾個模塊:雷達(dá)目標(biāo)的像素密度(Pixels Per Inch,PPI)顯示模塊、雷達(dá)控制模塊、紅外攝像模塊、精確打擊系統(tǒng)模塊、BIT顯示模塊、系統(tǒng)設(shè)置和日志模塊。主要內(nèi)容有雷達(dá)目標(biāo)的PPI顯示模塊;BIT顯示;紅外攝像視頻圖像顯示;局部放大功能,量程可選;電子地圖顯示;控制界面顯示;狀態(tài)信息顯示;具有手動記錄和存儲功能,并能夠重演;威脅目標(biāo)及參數(shù)和屬性列表;威脅目標(biāo)的聲音警報(bào)和顏色警報(bào);實(shí)現(xiàn)對雷達(dá)轉(zhuǎn)速、工作模式、掃描方式、頻率、自動增益控制(Automatic Gain Control,AGC)、紅外攝像頭指向、門限等控制。
1.2 軟件系統(tǒng)設(shè)計(jì)
雷達(dá)顯控終端的任務(wù)是雷達(dá)信息的顯示以及對雷達(dá)系統(tǒng)和相關(guān)系統(tǒng)的精確控制。無人機(jī)監(jiān)視雷達(dá)顯控終端是基于Windows操作系統(tǒng)和Qt平臺實(shí)現(xiàn)軟件開發(fā),并完成人機(jī)交互界面、系統(tǒng)通信、相關(guān)控制等設(shè)計(jì)與實(shí)現(xiàn)。顯控終端軟件的總體設(shè)計(jì)如圖1所示。

圖1 系統(tǒng)設(shè)計(jì)框架
1.2.1 雷達(dá)PPI顯示模塊
雷達(dá)PPI顯示是指將目標(biāo)采用平面二維顯示方式,顯示目標(biāo)方位和目標(biāo)距離。
(1)點(diǎn)航跡顯示。雷達(dá)傳送數(shù)據(jù)包括點(diǎn)跡數(shù)據(jù)和航跡數(shù)據(jù)。點(diǎn)跡數(shù)據(jù)是指通過雷達(dá)檢測確定為目標(biāo)的數(shù)據(jù)信息,包括目標(biāo)方位、距離、方位寬、距離寬、信噪比、濾波號、幅度、時間等信息。通過設(shè)置點(diǎn)跡顏色、點(diǎn)跡保留圈數(shù)、是否畫眉毛、最大顯示數(shù)量等,將所有接收到的點(diǎn)跡信息進(jìn)行顯示。航跡數(shù)據(jù)是在點(diǎn)跡基礎(chǔ)上判定為運(yùn)動目標(biāo),并記錄一定運(yùn)動軌跡的一系列數(shù)據(jù)信息,包括航跡批號、方位、距離、速度、方位寬、距離寬、高度、仰角、航向、時間等信息,通過設(shè)置當(dāng)前航跡和歷史航跡的顏色、航跡顯示個數(shù)、最大顯示航跡數(shù)、航跡顯示形狀、航跡保留圈數(shù)等,實(shí)現(xiàn)航跡信息的顯示,同時顯示當(dāng)前點(diǎn)跡總數(shù)和航跡總數(shù)。
當(dāng)收到航跡信息時,系統(tǒng)會彈出提示信息并發(fā)出警報(bào)聲,提醒工作人員準(zhǔn)備實(shí)施打擊,同時顯示產(chǎn)生航跡列表,顯示航跡的具體信息。
(2)掃描線等輔助信息。實(shí)時接收當(dāng)前雷達(dá)天線掃描方位,并通過扇形掃描線顯示當(dāng)前雷達(dá)天線掃描方位。雷達(dá)作用距離小于10 km,需要顯示相應(yīng)刻度線,并可以設(shè)置量程,包含2 km,4 km,6 km,8 km和10 km。同時,顯示當(dāng)前雷達(dá)天線掃描速度、時間、顯示的中心坐標(biāo)、鼠標(biāo)所指的方位和距離等。
(3)電子地圖顯示。背景需要實(shí)時顯示電子地圖,主要包括街道和地點(diǎn)、主要輪廓等,并可以設(shè)置透明度。
(4)記錄與回放功能。主要是實(shí)現(xiàn)手動記錄和存儲功能,并能夠重演。如果當(dāng)前軟件顯示部分由于發(fā)現(xiàn)目標(biāo)或者其他原因需要記錄時,可以通過記錄功能添加記錄,并可隨時重演記錄內(nèi)容。
1.2.2 雷達(dá)控制模塊
雷達(dá)控制主要包括參數(shù)控制、門限控制和扇區(qū)控制等,實(shí)現(xiàn)對雷達(dá)系統(tǒng)的實(shí)時控制和實(shí)時監(jiān)控。
(1)參數(shù)控制。包括對雷達(dá)的運(yùn)轉(zhuǎn)速度、掃描方式、工作模式、頻率、AGC等的控制。運(yùn)轉(zhuǎn)速度有停轉(zhuǎn)、每分鐘15轉(zhuǎn)、每分鐘20轉(zhuǎn)、每分鐘30轉(zhuǎn)等方式;掃描方式有環(huán)掃和扇掃,扇掃時還需要控制起始方位和終止方位;工作分為調(diào)頻連續(xù)波模式、PD模式、寂靜模式等;頻率和AGC分別控制雷達(dá)發(fā)射頻率和雷達(dá)自動增益控制。
(2)門限控制。主要是對雷達(dá)檢測目標(biāo)的閾值的控制,相對來說,門限越低越容易發(fā)現(xiàn)目標(biāo),但同時雜波也可以越多。主要包括多普勒處理和超雜波處理,包括總共8個相應(yīng)門限值的控制。
(3)扇區(qū)控制。主要是實(shí)現(xiàn)雷達(dá)對不同方位使用不同工作模式。比如在工作人員所在方位采用寂靜模式,以免雷達(dá)發(fā)射電磁波對身體造成傷害;如果在某個區(qū)域想重點(diǎn)檢測,可以設(shè)置該區(qū)域特定的工作模式、相應(yīng)AGC等。可以劃分多個扇區(qū),最多發(fā)送10個扇區(qū),對每個扇區(qū)都可以設(shè)置工作模式、AGC等。
1.2.3 BIT顯示模塊
BIT顯示模塊主要是針對整個雷達(dá)系統(tǒng)中每個系統(tǒng)的工作狀態(tài)的監(jiān)控。主要分為天線系統(tǒng)、接收系統(tǒng)、信號系統(tǒng)、頻綜模塊、伺服系統(tǒng)、紅外系統(tǒng)和終端系統(tǒng)的故障和狀態(tài)信息。
終端軟件界面需要實(shí)時顯示各個系統(tǒng)的工作狀態(tài),如果出現(xiàn)故障會進(jìn)行報(bào)警顯示,并可以查看具體故障內(nèi)容,信號系統(tǒng)會實(shí)時給終端系統(tǒng)發(fā)送故障信息。
1.2.4 紅外攝像模塊
無人機(jī)監(jiān)視雷達(dá)的主要目的是發(fā)現(xiàn)周邊敵方無人機(jī)或者惡意低、小、慢目標(biāo),并對威脅目標(biāo)實(shí)現(xiàn)打擊,以達(dá)到秘密信息不被發(fā)現(xiàn)的目的。一般無人機(jī)飛行較低,可以通過高清紅外攝像觀察目標(biāo),通過雷達(dá)發(fā)現(xiàn)目標(biāo)后根據(jù)目標(biāo)方位調(diào)整紅外攝像的指向,實(shí)時觀察目標(biāo)的情況。終端主要完成視頻圖像的顯示、云臺控制、攝像頭控制等:
(1)視頻圖像顯示。紅外系統(tǒng)會實(shí)時向終端系統(tǒng)發(fā)送視頻數(shù)據(jù),終端軟件需要對接收到的視頻流數(shù)據(jù)進(jìn)行解析并顯示。(2)云臺控制。主要是實(shí)現(xiàn)紅外攝像頭的指向控制,可以控制云臺水平方向順時針和逆時針轉(zhuǎn)動,俯仰方向的俯仰運(yùn)動,還可以通過定位控制、自動獲取控制和手動跟蹤控制。(3)攝像頭控制。主要包括對攝像頭的變位、聚集、光圈的控制和燈光的控制。
1.2.5 打擊系統(tǒng)模塊
精確打擊系統(tǒng)主要是針對發(fā)現(xiàn)的無人機(jī)或其他威脅目標(biāo)實(shí)施打擊,以達(dá)到阻止其對我方造成進(jìn)一步影響。打擊系統(tǒng)模塊主要是對精確打擊系統(tǒng)的控制,包括信號源開關(guān)、干擾信號、轉(zhuǎn)臺控制、打擊控制等。干擾信號包括GPS信號、WiFi信號、遙控信號等,轉(zhuǎn)臺控制主要是對轉(zhuǎn)臺水平方向上的控制。通過打擊控制,可以實(shí)現(xiàn)在指定方位發(fā)射干擾信號進(jìn)行打擊。
1.2.6 系統(tǒng)設(shè)置和日志
系統(tǒng)設(shè)置和日志主要是對系統(tǒng)進(jìn)行相應(yīng)的設(shè)置以及操作記錄、點(diǎn)航跡信息保存等。
(1)系統(tǒng)設(shè)置,包括對終端各個部分的設(shè)置。常規(guī)設(shè)置包括是否顯示刻度線、刻度線顯示方式、是否顯示航跡游標(biāo)、是否顯示圈外目標(biāo)、天線顯示方式等;點(diǎn)跡設(shè)置包括點(diǎn)跡保留圈數(shù)、是否畫眉毛、點(diǎn)跡顏色、最大顯示數(shù)量等;航跡設(shè)置包括連續(xù)顯示個數(shù)、顯示形狀、當(dāng)前航跡顏色、歷史航跡顏色、最大顯示數(shù)量、保留圈數(shù)等;BIT設(shè)置包括警報(bào)顏色、正常顏色、故障提示方式等;扇區(qū)設(shè)置包括畫扇區(qū)顏色、線條粗細(xì)、扇區(qū)上限個數(shù)等。系統(tǒng)還可以設(shè)置傳輸IP和端口,但是需要輸入管理員密碼,以防止隨意更改導(dǎo)致數(shù)據(jù)傳輸故障。
(2)日志,包括操作記錄、點(diǎn)航跡信息保存等。系統(tǒng)保存所有操作記錄,包括具體設(shè)置的數(shù)值。對所有接收到的點(diǎn)跡和航跡數(shù)據(jù)信息進(jìn)行保存,可以顯示當(dāng)前接收到的數(shù)據(jù)信息,以文件的形式保存所有接收的數(shù)據(jù),以便進(jìn)一步查看。
2 雷達(dá)顯控終端的實(shí)現(xiàn)
系統(tǒng)參數(shù)設(shè)置、門限設(shè)置、扇區(qū)設(shè)置、打擊系統(tǒng)、系統(tǒng)設(shè)置等通過菜單打開實(shí)現(xiàn)。無人機(jī)監(jiān)視雷達(dá)顯控終端軟件完成后,通過網(wǎng)口與各個系統(tǒng)進(jìn)行連接,并進(jìn)行系統(tǒng)聯(lián)調(diào)。經(jīng)過實(shí)驗(yàn)驗(yàn)證,終端軟件可以完成所有需求的功能,可以正確接收數(shù)據(jù)并進(jìn)行顯示,正確控制雷達(dá)系統(tǒng)及相關(guān)系統(tǒng),完成系統(tǒng)與雷達(dá)系統(tǒng)其他各部分的協(xié)同工作。主界面包含雷達(dá)PPI顯示、BIT顯示、航跡列表、紅外顯示等,如圖2所示。
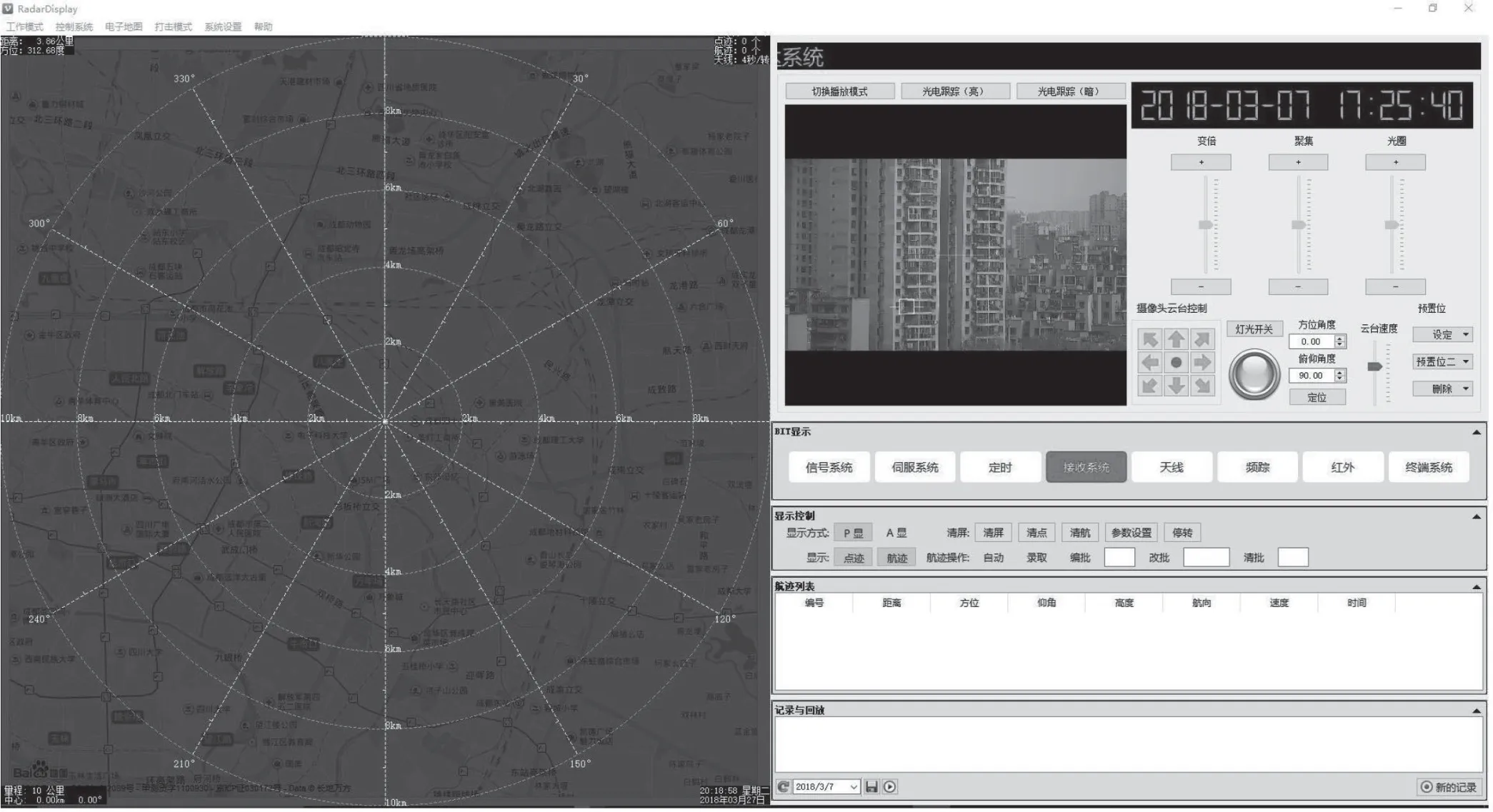
圖2 軟件主界面
3 結(jié)語
文章設(shè)計(jì)實(shí)現(xiàn)了基于Qt平臺的雷達(dá)顯示與控制終端,系統(tǒng)具有性能高、功能強(qiáng)大的特點(diǎn)。主要設(shè)計(jì)工作內(nèi)容及系統(tǒng)功能如下:(1)經(jīng)過分析比較,選擇Qt平臺作為無人機(jī)監(jiān)視雷達(dá)顯控終端軟件的開發(fā)平臺,通過Qt的系統(tǒng)架構(gòu)、圖導(dǎo)引擎以及信號與插槽機(jī)制等關(guān)鍵技術(shù)完成無人機(jī)監(jiān)視雷達(dá)顯控終端軟件的開發(fā)。(2)根據(jù)無人機(jī)監(jiān)視雷達(dá)顯控終端的功能需求,設(shè)計(jì)并實(shí)現(xiàn)了顯控終端軟件。本文實(shí)現(xiàn)的雷達(dá)系統(tǒng)較大,需研發(fā)周期也較長,由于時間限制,對系統(tǒng)進(jìn)行了初步設(shè)計(jì)與實(shí)現(xiàn),存在一些不足之處,文章實(shí)現(xiàn)的無人機(jī)監(jiān)視雷達(dá)顯控終端功能還需進(jìn)一步完善,后期還需對電子地圖等功能進(jìn)行完善以及相關(guān)數(shù)據(jù)處理,實(shí)現(xiàn)目標(biāo)航跡跟蹤等功能。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
少先隊(duì)活動(2021年4期)2021-07-23 01:46:22
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
沈陽醫(yī)學(xué)院學(xué)報(bào)(2015年1期)2015-12-27 13:44:40
醫(yī)學(xué)教育管理(2015年3期)2015-12-01 06:43:16
中外會展(2014年4期)2014-11-27 07:46:46
都市快軌交通(2014年4期)2014-02-27 08:35:05
