基于車載的軌道扣件同步采集系統設計及實現
2020-09-04 05:11:20彭樂樂鐘倩文鄭樹彬
鐵道標準設計 2020年9期
關鍵詞:系統
李 鑫,彭樂樂,鐘倩文,鄭樹彬
(上海工程技術大學城市軌道交通學院,上海 201620)
線陣相機是軌道視覺檢測系統中獲取軌道扣件信息的重要技術手段,受車輛運行變速和振動影響,線陣相機拍攝的軌道扣件圖像會出現拉伸、壓縮和失真等現象[1-4]。因此,如何在車輛行駛時獲得清晰完整的軌道扣件圖像,是實現軌道視覺檢測的關鍵環節之一[5-7]。
目前,軌道扣件檢測系統研究在智能算法方面已經非常成熟了,但軌道扣件信息獲取技術還不夠完善[8-9]。現有的軌道扣件信息獲取是通過單片機讀取編碼器脈沖信號并輸出脈沖信號觸發控制線陣相機工作拍攝圖像;利用脈沖計數同步獲取慣性單元傳感器信息[10-12]。然而,該類采集軌道信息方法受車輛運行時發生打滑和空轉影響,導致拍攝的軌道扣件圖像出現拉伸和壓縮現象;且在高速狀態中,產生脈沖計數不準確和采樣頻率過高等問題,導致采集的慣性信息數據出現偏差及重復等問題[13-14],這進一步影響到采集軌道扣件信息的精度。
為了實現變速下軌道扣件信息的同步獲取,本文設計了一種基于車載的軌道扣件同步采集系統。基于車載速度脈沖建立了線陣相機等距觸發控制關系和傳感器同步采集模型,利用FPGA實現車載速度脈沖信號倍頻變換及各傳感器同步觸發控制。實驗表明,該軌道扣件同步采集系統能夠穩定觸發采集各傳感器信息,采集到的軌道扣件圖像不失真變形。
1 系統設計結構及原理
圖1給出了基于車載的軌道扣件同步采集系統結構。該結構主要由2臺線陣CCD相機、陀螺儀、加速度計和傾角儀組成的慣性單元、FPGA和工控機組成。為了獲取高清晰的軌道扣件圖像,實現軌道扣件圖像及相機慣性信息同步采集,利用車載速度脈沖信號建立速度測量及補償模型,通過車載脈沖頻率得到車輛瞬時速度和行駛距離;建立等間距變換關系得出車載速度脈沖頻率與線陣相機等距拍攝軌道扣件圖像的線掃描速率對應關系,從而實現線陣相機等間距觸發控制;通過建立傳感器同步觸發模型來實現傳感器信息同步采集。選擇合適的線陣相機,利用FPGA實現線陣相機的等距觸發控制和傳感器信號的同步采集,從而得到符合檢測要求的軌道扣件圖像,實現軌道扣件的同步采集。
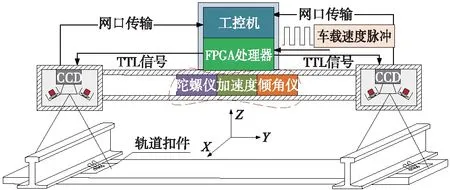
圖1 軌道扣件檢測系統結構
2 基于車載速度脈沖與距離的變換關系及模型
2.1 基于車載速度脈沖的測速及補償模型
基于車載速度脈沖建立測速和速度補償模型,建立車載速度脈沖信號頻率數據與車輛行駛速度數據的相互關系,從而通過測量的車載速度脈沖頻率得到車輛行駛速度;通過補償模型對速度進行補償處理,使測量得到的速度趨近車輛實際速度;得到精準的車輛行駛距離。
2.1.1 速度模型
該軌道扣件同步采集系統獲取車載速度脈沖信號得到速度與脈沖信號之間的對應關系;車載速度脈沖通過車載上安裝的光電式速度傳感器產生的,其頻率大小隨車輛運行速度變化而變化。兩者關系為
(1)
式中,Vo為車輛運行速度;R為車輛車輪半徑;m為光電式速度傳感器內部光柵數;fm為光電式速度傳感器輸出信號的頻率值。通過測量車載速度脈沖的頻率信號便可獲知車輛的速度大小。
2.1.2 速度補償模型
車載光電式速度傳感器受車輛在運行過程中發生空轉和打滑影響,導致測量計算的速度與車輛實際速度存在較大誤差,需對其進行補償處理。這里提出了一種基于光電速度傳感器輸出的前n個時刻的脈沖信號頻率值來修正最新時刻脈沖頻率值的方法,建立速度補償模型,得出補償后車輛速度與車載速度脈沖頻率之間的關系。通過計算前n個脈沖信號頻率的平均值作為最新時刻脈沖信號的頻率值,來計算車輛速度。
如圖2所示,通過前n個脈沖信號的頻率值實時補償修正光電速度傳感器輸出最新時刻的脈沖頻率值,然后以補償后的脈沖頻率值作為輸入,建立速度補償模型,得到車輛運行速度和車載速度脈沖頻率值間的關系
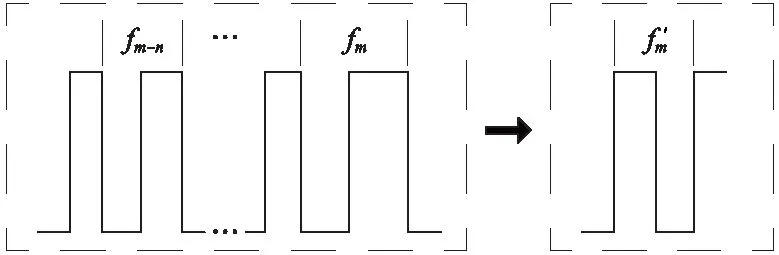
圖2 脈沖脈寬變化示意

(3)
式中,Lo為補償處理計算得到的車輛行駛距離;fm為實時車載速度脈沖的頻率。通過式(3),可知車載速度脈沖頻率對應周期內車輛行駛的距離。
2.2 等距變換關系
該軌道扣件同步采集系統通過2臺線陣相機獲取左右2條軌道的扣件圖像信息,線陣相機每次只掃描一條線,通過連續掃描后拼接形成二維圖像。通過建立等距變換關系,得出車載速度脈沖頻率與線陣相機等距拍攝軌道扣件圖像的線掃描速率對應關系,從而實現線陣相機等間距拍攝軌道扣件圖像的觸發。根據線陣相機拍攝的軌道扣件圖像不出現拉伸和壓縮現象要求,需要保證圖像的橫向和縱向分辨率相同。線陣相機拍攝軌道扣件圖像時,其橫向分辨率由線陣相機自身的像素和拍攝目標物軌道扣件的寬幅決定,縱向分辨率由車輛行駛距離和線掃描速率決定。其橫向分辨率為
(4)
其中,Lc為線陣相機拍攝的軌道扣件圖像寬幅,Hc為線陣相機的每線像素數。縱向分辨率為
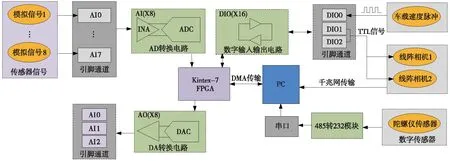
圖3 FPGA控制框圖
其中,Lo為車載速度脈沖對應的車輛行駛距離;Vo為線陣相機線掃描速率;Tm為車載脈沖信號周期。由式(3)、式(4)和式(5)可得到線陣相機等間距拍攝軌道扣件圖像的線掃描速率與車載速度脈沖之間的關系為
(6)
利用式(6)的變換關系,實現線陣相機等距拍攝軌道扣件圖像控制。
2.3 傳感器同步觸發采集模型
該軌道扣件同步采集系統通過陀螺儀、加速度計和傾角儀來獲取系統運行的角速度、加速度和角度等慣性信息。系統在運行過程中,其角速度、加速度和角度等慣性信息在一定距離內是相同的,并不需要線陣相機線掃描速率那么高的采用頻率采集傳感器信息。通過設定車輛每運行l距離采集一次傳感器信息,得到該同步采集系統的慣性信息同步采集頻率和車載速度脈沖頻率之間的關系。由式(3)可知車輛運行距離與車載速度脈沖信號頻率的關系,在距離l確定的條件下,通過倍頻變化得到傳感器同步觸發采集頻率和車載速度脈沖頻率之間的變換關系。
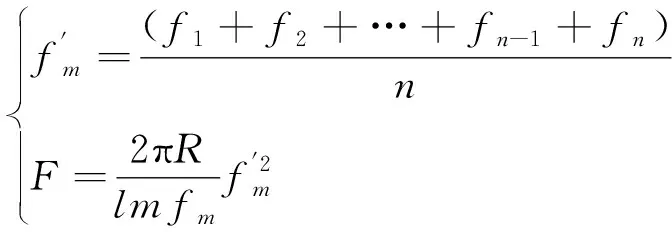
(7)
其中,F為傳感器同步觸發采集頻率;l為設定的采集距離。通過式(7)實現系統每運行l距離時同步觸發控制采集傳感器信息。
3 基于FPGA實現線陣相機等距觸發和傳感器同步采集控制
如圖3所示,該軌道扣件同步采集系統采用Kintex-7 FPGA系列芯片作為中央處理芯片,利用FPGA硬件并行優勢,使系統在每個時鐘周期內同時完成多個處理任務[15]。FPGA芯片實時控制數字輸入輸出電路讀取車載速度脈沖信號的頻率,根據測速與補償模型和等距變換關系計算得到相機等距拍攝的線掃描頻率,然后通過定時翻轉產生相應頻率的脈沖信號觸發線陣相機工作[16-18]。該系統通過串口獲取陀螺儀信號,FPGA芯片通過DMA傳輸方式從PC端獲取串口接收的陀螺儀傳感器產生的數字信號,然后經DAC電路將數字信號轉換為模擬信號輸出;輸出的模擬信號同加速度計和傾角儀等模擬傳感器產生的模擬信號經ADC電路傳輸給FPGA芯片,然后FPGA芯片根據傳感器同步觸發采集模型計算得出的同步采集頻率對多個通道的模擬信號進行同步采樣采集[19-20];最后將采集到的信息傳輸至上位機。
該軌道扣件同步采集系統程序控制部分主要用于完成PC端數字信號的采集與發送、車載速度脈沖信息的獲取、倍頻計算及脈沖信號輸出和多通道模擬信號的采集及上傳等動作。本設計采用NI LabVIEW軟件進行FPGA編程,完成系統功能開發。系統上電后芯片的主程序首先進行初始化,然后系統實時從PC端獲取采集到的陀螺儀數據然后將其發送;系統通過識別脈沖信號的上升沿時間間隔判定脈沖的頻率并進行倍頻變化輸出,用于線陣相機觸發和傳感器信號的同步采集,最后將采集到的傳感器數據上傳給上位機。程序流程如圖4所示。

圖6 各傳感器數據
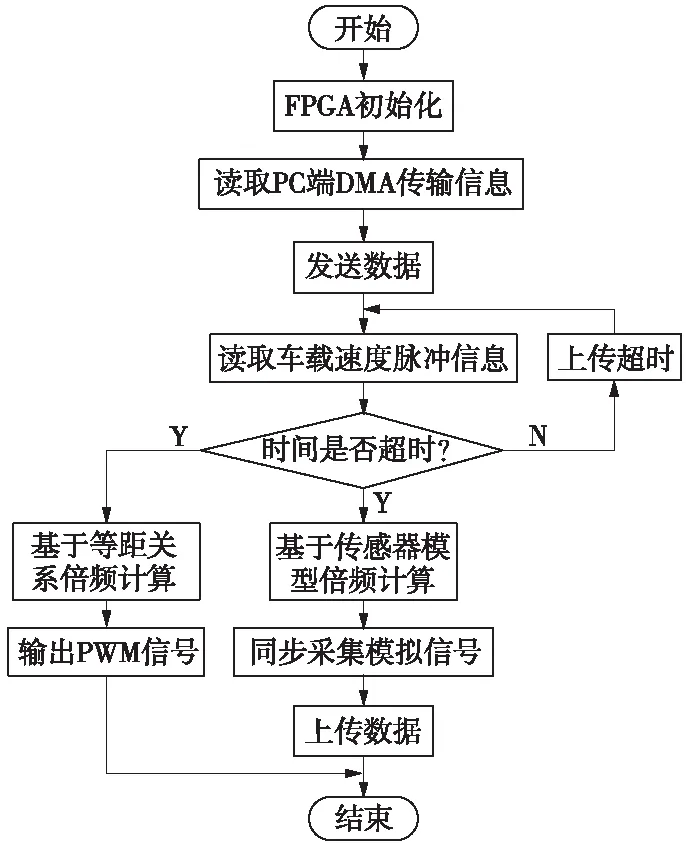
圖4 軟件主程序流程
4 實驗驗證
為了驗證本文所設計系統的效果,搭建了軌道檢測小車測試平臺(圖5),該軌道檢測小車上安裝有線陣相機、慣性傳感器、光電編碼器和NI采集設備,其中線陣相機安裝在小車前方。推動小車在軌道上以不同速度來回運動,并在變速的過程中增加急加速和急減速來產生空轉和打滑等狀態;連續運行1 000 m測試采集系統的性能。
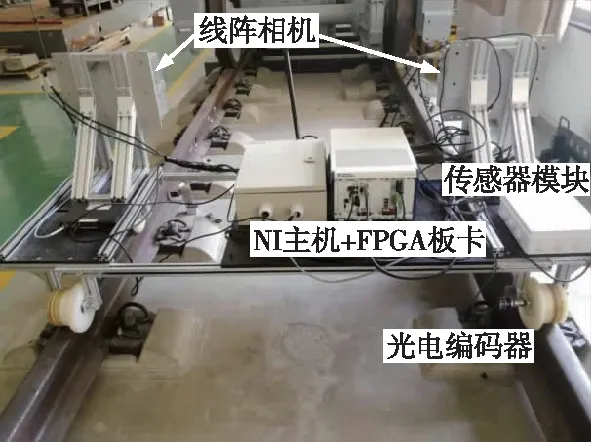
圖5 軌道檢測小車測試平臺
表1給出了選用線陣相機的關鍵參數,保證線陣相機拍攝的軌道扣件圖像滿足鐵路檢測要求為0.5 mm的精度要求。表2給出了慣性傳感器各傳感器具體型號。

表1 線陣相機關鍵參數

表2 各慣性傳感器型號
圖6給出了實驗過程中同步采集的各傳感器數據,系統通過設置傳感器同步采集模型參數l的值為1 m,實驗總共測試距離為1 000 m,系統準確的同步采集到1 000組傳感器數據。圖6中傳感器信息能夠反映線陣相機工作時的振動情況,可用于扣件圖像補償處理。
圖7為圖像采集上位機軟件,線陣相機通過千兆網線和主機系統連接,上位機軟件通過識別、配置和控制兩個線陣相機完成軌道扣件圖像采集存儲和顯示。該系統能夠隨速度變化根據等距觸發模型實時觸發線陣相機工作,等距拍攝的扣件圖像效果較好,如圖8所示。圖8(a)、圖8(b)、圖8(c)三圖為基于車載脈沖等距觸發采集的方法在實驗過程中不同速度下獲取的軌道扣件圖像,圖片信息完整清晰,未出現失真現象;系統能夠完成變速下圖像的準確采集。
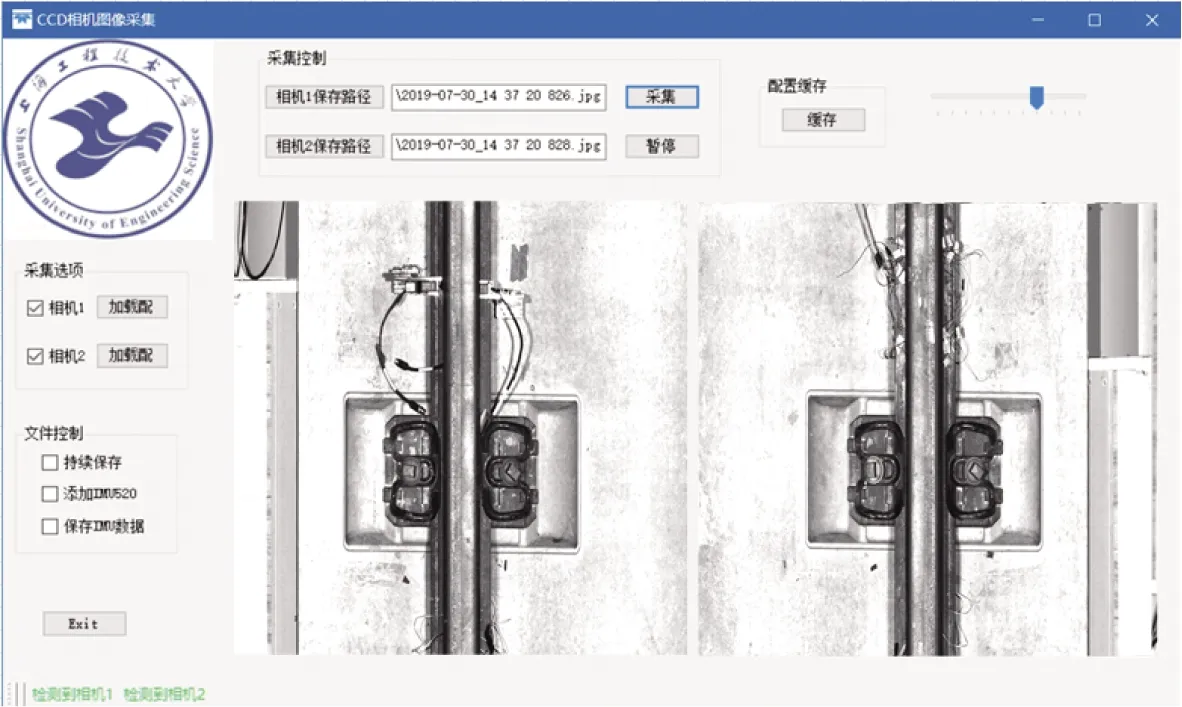
圖7 扣件采集軟件界面
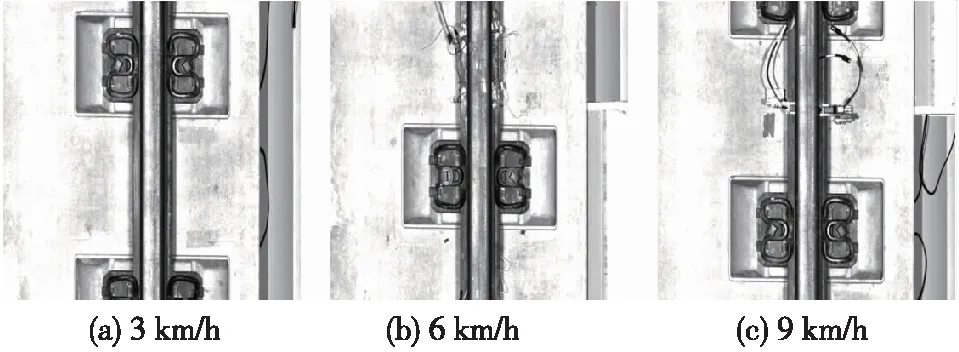
圖8 不同速度下采集的扣件圖像
圖9為基于常規光電編碼器直接觸發采集方法獲取的軌道扣件圖像;因變速運行過程中發生空轉、打滑等狀況,導致采集的圖像在軌道扣件區域出現了較為明顯的失真現象。
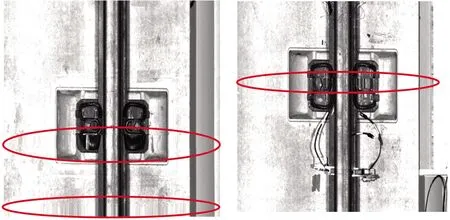
圖9 軌道失真圖像
通過圖8、圖9對比可知,相比常規光電編碼器直接觸發采集的方式,本文基于車載脈沖等距觸發采集的方法,可以解決變速中產生空轉和打滑等狀況導致采集的軌道扣件圖像失真問題。
5 結語
針對線陣相機拍攝軌道扣件時受變速和振動的影響導致拍攝的軌道扣件圖像失真問題,本文設計了一種基于車載的軌道扣件同步采集系統。通過搭建軌道檢測小車進行軌道信息采集實驗測試本系統性能,結果表明:該系統能夠根據建立的等距關系和同步采集模型,實現線陣相機的等距拍照和傳感器信息的同步采集,且獲取的圖像不失真。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
