巡檢機器人在井場上的應用
2020-09-06 13:22:45盧光旭
中國新技術新產品 2020年11期
盧光旭

摘? 要:傳統井場巡檢采用人工巡檢方式,工作量大、巡檢效率低。井場智能巡檢機器人實現了自主巡檢,并把巡檢結果上傳至SCADA系統。井場智能巡檢機器人采用激光雷達無軌導航方式,具有儀表識別、抽油機狀態檢測、紅外測溫、可燃氣體檢測、異常聲音檢測等功能。
關鍵詞:井場巡檢;自主導航;機器人
中圖分類號:TP242? ? ? ? ? ? ? 文獻標志碼:A
1 井場巡檢的特點和內容
井場巡檢采用人工巡檢方式,工作量大、巡檢效率低,且存在無法及時發現少量氣體泄漏、溫度異常、聲音異常、儀表讀數異常等故障信息,以及惡劣天氣下巡檢存在安全隱患等問題。而巡檢機器人具有安防監控功能,能及時發現可疑人員進入,并通過揚聲器喊話警告。巡檢機器人內置GPS定位跟蹤裝置,當檢測到自身位置移動到安全區域以外時,會及時向監控中心上傳報警信息。
2 機器人的系統組成和工作原理
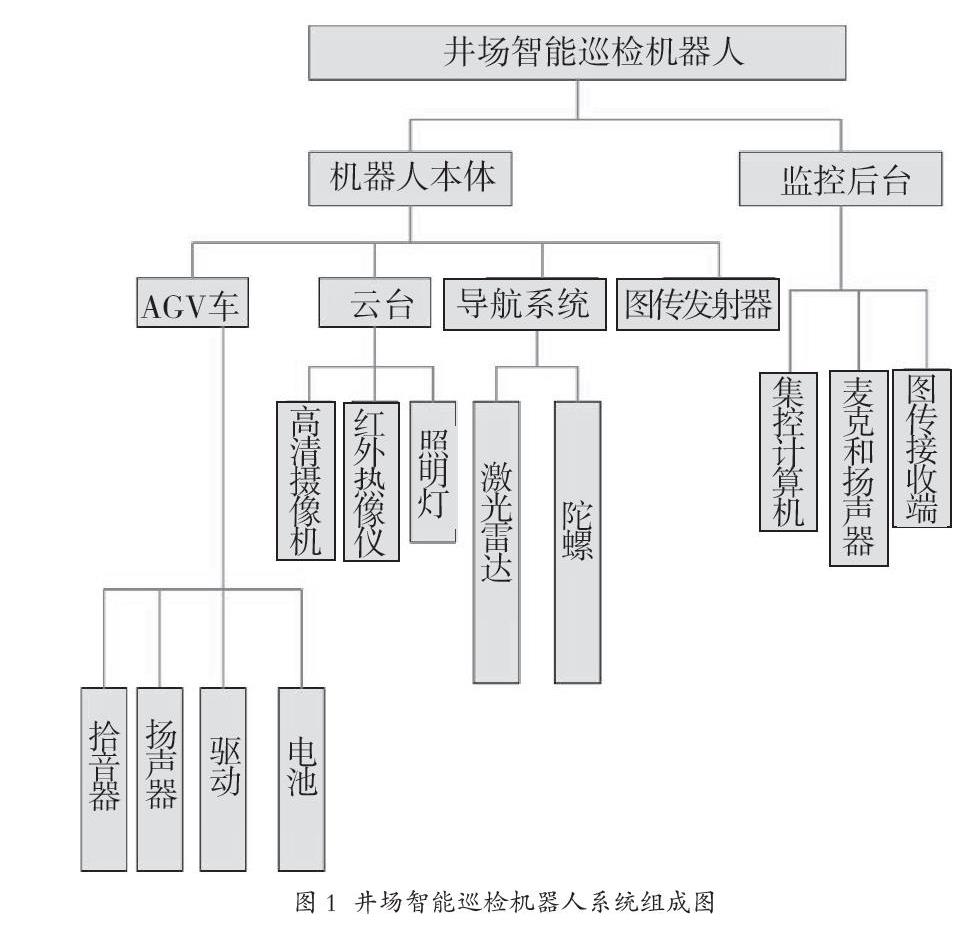
2.1 系統組成
井場智能巡檢機器人是集多傳感器融合技術、電磁兼容技術、導航及行為規劃技術、機器人視覺、安防技術、海量信息的無線傳輸于一體的復雜系統。其主要由機器人本體、充電房、遠程集控后臺組成。
2.2 工作原理
井場智能巡檢機器人通過激光雷達和IMU組合導航,利用車載紅外、可見光及聲音傳感器檢測異常狀況。機器人將采集到的所有圖像和數據,通過無線傳輸系統實時發送到監控后臺,監控后臺負責數據顯示、記錄和路徑規劃。
對于初次巡檢的場景,機器人需要制作巡檢路徑地圖,并存入導航計算機。機器人制作完地圖后,可以通過后臺下發巡檢任務。在巡檢期間,機器人控制云臺對巡檢場景進行拍照和攝像。
3 機器人自動巡檢的功能及實現方式
井場智能巡檢機器人具備以下13項基本功能。
3.1 配備高清攝像機進行可見光表計及滲漏檢測
巡檢機器人的云臺配備高清攝像機,可以進行可見光拍照,并對所拍的照片進行儀表檢測,得到當前壓力表的指針讀數。
3.2 聲音采集及分析功能
巡檢機器人可以采集并分析拾音器采集到的音頻數據,通過頻域分析可以檢測出是否有漏油、漏氣等異常聲音。
3.3 雙向語音通信功能
巡檢機器人集成有揚聲器、拾音器和音頻服務器。通過后臺對音頻服務器的遠程訪問,可以實現雙向語音對講功能。
3.4 抽油機狀態監測功能
巡檢機器人檢測的抽油機數據包括壓力表指針數值、光桿溫度(高溫、低溫)、光桿形變、電機溫度、聲音分析(漏氣、漏油)以及甲烷濃度。
3.5 手動控制功能
手動控制功能包括云臺控制和機器人運動控制。云臺控制用來控制機器人上的云臺上下左右移動。機器人運動控制包括一鍵返航、取消巡檢、修井、巡檢、暫停、繼續等。
3.6 數據查詢、篩選及導出功能
儀表、溫度、聲音分析等結果數據通過ModbusTCP協議傳送給IOServer,管理員可從IOServer數據庫根據時間戳、變量名等對數據進行查詢和篩選并導出。
3.7 報表功能
巡檢機器人的巡檢數據可以通過生成報表導出。
3.8 視頻對接功能
巡檢機器人采用海康威視的網絡攝像機,可接入安防監控平臺,也可用視頻控件在SCADA系統中顯示。
3.9 遠距離網絡傳輸功能
巡檢機器人通過無線網橋實現遠距離網絡傳輸功能。
3.10 一鍵返航功能
巡檢機器人具有一鍵返航功能,通過單擊“一鍵返航”按鈕暫停當前巡檢任務或結束修井監控狀態,之后讓機器人返回充電房。
3.11 自主充電功能
巡檢機器人具有自主充電功能。機器人完成一次巡檢任務,或在巡檢過程中檢測到電量低于閾值時,會自動返回充電房,進入充電位置,自動充電。
3.12 GPS定位功能
巡檢機器人具有GPS定位功能,巡檢機器人將自身位置發送給后臺軟件,當后臺軟件檢測到巡檢機器人位置異常時會報警。
3.13 自檢及告警功能
巡檢機器人的后臺軟件顯示將當前工作狀態、工作電壓、故障信息和越界檢測信息。
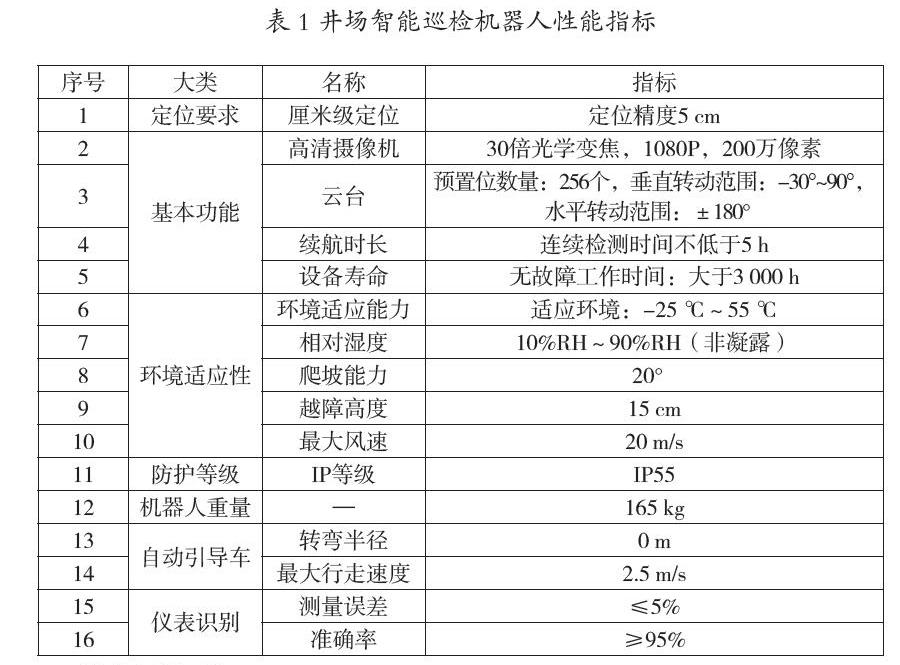
4 巡檢機器人的性能
經過實際測試巡檢機器人的性能指標見表1。
5 關鍵技術
5.1 激光雷達特征匹配技術
文獻[1]提出了基于SEF算法的激光雷達數據特征分割法,該算法通過計算激光雷達相鄰兩幀原始數據的差值得到直線,進一步得到分割圖像的特征。該方法無法完成相交直線的提取。文獻[2]采用LEPF算法對激光雷達圖像進行特征提取。該方法容易產生欠提取現象。該文提出了基于點特征提取和線性特征提取的方法。
5.1.1 點狀特征提取
點狀特征指樹木、設備支撐桿等在點云圖上表述為孤立、半徑較小的點集,采用聚類算法對點狀特征進行提取。以數據集在空間分布上的稀疏程度進行聚類,不需要在聚類之前預先設定類的數量。
5.1.2 線性特征提取
線性特征指圍墻、建筑物等在點云圖上表述為長度足夠大的線段,采用霍夫變換對點狀特征進行提取。通過判斷線段的間距、斜率等信息,對提取的線段進行合并,提高準確率。
5.2 SIFT算法光桿識別技術
利用SIFT算法對光桿、電機和抽油機運動進行檢測,如圖2所示。
首先,利用分辨率384×288,6 mm焦距的非制冷紅外熱像儀,檢測直徑約10 mm的光桿的溫度和形變。光桿在紅外圖像上的成像寬度僅占5個像素左右,且背景復雜。SIFT算法通過關鍵位置檢測、特征提取、特征匹配等步驟定位光桿的位置,進而檢測光桿的溫差和細微形變,其能及時檢測抽油機的抽油狀態,并對故障進行報警。
其次,SIFT算法通過關鍵位置檢測、特征提取、特征匹配等步驟定位電機的位置,進而測量電機的溫度。
最后,SIFT算法通過關鍵位置檢測、特征提取、特征匹配等步驟,通過輸出的運動跟蹤點的運動路徑和方向,即可判斷抽油機是否在工作。
6 結論
目前長慶油田已有8 000多座井場進行了視頻系統建設,電線桿上裝有攝像頭、喇叭、天線。井場周圍裝有圍墻。但是這些井場并沒有實現無人值守。用機器人來代替人工進行日常巡檢,可以提高井場的智能化水平,實現無人值守是油田的發展趨勢,在未來得到推廣的可能性較大,具有巨大的社會效益和經濟效益。
參考文獻
[1]陳麗敏,戚天蘭,杜殷飛,等.一種快速有效的卷煙激光打碼防偽識別算法[J].信息工程期刊:中英文版,2014,4(3):78-82.
[2]龔衛國,劉潤瑤,張睿.光照突變下融合多類特征的場景分割方法(英文)[J].紅外與激光工程,2014,43(12):4164-4169.
