基于可分離式發(fā)電機(jī)的智能能量回收
2020-09-06 13:22:45陶闖闖蔡煒楨方昊宇莊偉建
中國(guó)新技術(shù)新產(chǎn)品 2020年11期
陶闖闖 蔡煒楨 方昊宇 莊偉建

摘? 要:該文主要介紹一種基于可分離式發(fā)電機(jī)的智能儲(chǔ)能系統(tǒng),該系統(tǒng)以滑板為載體,以STM32單片機(jī)為控制器,采用徑向結(jié)構(gòu)永磁同步電機(jī)搭建可分離式發(fā)電裝置,將制動(dòng)時(shí)滑板的動(dòng)能轉(zhuǎn)化為電能儲(chǔ)存起來(lái),具體包括剎車(chē)儲(chǔ)能、下坡儲(chǔ)能和避障儲(chǔ)能3種形式。系統(tǒng)采用一定的控制策略,智能高效地回收能量,并將其儲(chǔ)存于滑板電源中。
關(guān)鍵詞:能量回收;STM32單片機(jī);可分離式發(fā)電機(jī);徑向結(jié)構(gòu)永磁同步電機(jī)
中圖分類(lèi)號(hào):TM31? ? ? ? ? 文獻(xiàn)標(biāo)志碼:A
0 前言
制動(dòng)能量回收是一種實(shí)現(xiàn)節(jié)能減排的有效措施,其主要應(yīng)用在一些需要頻繁制動(dòng)的交通工具中,以此來(lái)說(shuō)回收再利用制動(dòng)過(guò)程中浪費(fèi)的大量能量[1]。該系統(tǒng)采用新型可分離式發(fā)電機(jī),以STM32單片機(jī)為控制核心,借助陀螺儀、超聲避障模塊對(duì)是否遇到下坡或障礙物進(jìn)行判斷,在剎車(chē)、下坡及避障時(shí)進(jìn)行能量回收。
1 設(shè)計(jì)方案及工作原理
1.1 系統(tǒng)總體方案
運(yùn)行過(guò)程中,陀螺儀、超聲避障模塊采集到的信號(hào),以及剎車(chē)信號(hào)都將發(fā)送給STM32單片機(jī),由單片機(jī)決定是否通過(guò)操動(dòng)機(jī)構(gòu)操縱可分離式發(fā)電機(jī)的定轉(zhuǎn)子部分的狀態(tài)。當(dāng)定子部分進(jìn)入轉(zhuǎn)子部分,定子線(xiàn)圈切割轉(zhuǎn)子磁場(chǎng),機(jī)械能轉(zhuǎn)化為電能,經(jīng)整流穩(wěn)壓之后,輸送給滑板電源儲(chǔ)存起來(lái)。同時(shí)轉(zhuǎn)子會(huì)受到一個(gè)阻尼電磁轉(zhuǎn)矩,實(shí)現(xiàn)一定的制動(dòng)效果。而當(dāng)定、轉(zhuǎn)子分離,發(fā)電機(jī)則不再輸出電能,同時(shí)轉(zhuǎn)子也不再受到阻尼電磁轉(zhuǎn)矩的作用。
1.2 可分離式發(fā)電機(jī)及分離操動(dòng)機(jī)構(gòu)
1.2.1 發(fā)電機(jī)的選取
與傳統(tǒng)電勵(lì)磁同步電機(jī)相比,永磁同步發(fā)電機(jī)以永磁體替代電勵(lì)磁繞組,不消耗勵(lì)磁功率,還可以省去滑環(huán)和電刷,擁有更高的效率,電機(jī)結(jié)構(gòu)更簡(jiǎn)單、可靠性高。剛好滿(mǎn)足該系統(tǒng)設(shè)計(jì)對(duì)電機(jī)高效率、可分離、可靠性高的要求。
文獻(xiàn)[2]提出:首先,徑向結(jié)構(gòu)永磁同步發(fā)電機(jī)的電壓調(diào)整率小于切向結(jié)構(gòu)永磁電機(jī),外特性較切向結(jié)構(gòu)電機(jī)硬。其次,從功角特性可知,徑向結(jié)構(gòu)永磁同步發(fā)電機(jī)的運(yùn)行穩(wěn)定性要大于切向結(jié)構(gòu)電機(jī)。最后,徑向結(jié)構(gòu)永磁同步發(fā)電機(jī)的漏磁較小,轉(zhuǎn)子裝配工藝簡(jiǎn)單。
因此該系統(tǒng)采用徑向結(jié)構(gòu)永磁同步發(fā)電機(jī),同時(shí)為減小系統(tǒng)結(jié)構(gòu)的復(fù)雜程度,采用輪轂電機(jī)的方式,將發(fā)電機(jī)與滑板輪集成到一起。
1.2.2 可分離式發(fā)電機(jī)結(jié)構(gòu)
發(fā)電機(jī)繞組線(xiàn)圈需相對(duì)于滑板板身徑向靜止,因此將線(xiàn)圈置于定子部分,永磁體置于轉(zhuǎn)子部分,定子套裝在車(chē)軸上,轉(zhuǎn)子嵌入輪胎,采用輪轂電機(jī)式的結(jié)構(gòu)。
考慮到滑板原車(chē)輪內(nèi)徑為60 mm,所以選取的磁鋼外徑為60 mm、內(nèi)徑為54 mm。在保證轉(zhuǎn)子與定子可正常分離的情況下,需要盡量減小定子與轉(zhuǎn)子間的氣隙。經(jīng)過(guò)試驗(yàn),該設(shè)計(jì)選取外徑為50 mm的矽鋼片壓制成定子鐵心。另外,考慮到單塊永磁體的大小與磁鋼套大小之間的配合,將電機(jī)設(shè)計(jì)為24極電機(jī)。對(duì)于定子線(xiàn)圈繞法的選取,發(fā)電機(jī)在運(yùn)行過(guò)程中會(huì)產(chǎn)生大量的各次諧波,而其中最主要的就是三次諧波分量[3],為抑制三次諧波,防止發(fā)電機(jī)三相繞組產(chǎn)生很大的三次諧波環(huán)流,導(dǎo)致繞組過(guò)熱、能量回收效率降低,所以該發(fā)電機(jī)繞組采用星形繞法。
分離操動(dòng)機(jī)構(gòu)主要由定子及磁鐵A總成、驅(qū)動(dòng)及磁鐵B總成組成。沿車(chē)軸軸向?qū)⒍ㄗ优c環(huán)形磁鐵A固定到一起,構(gòu)成定子及磁鐵A總成,其只能沿軸向直線(xiàn)運(yùn)動(dòng)。沿車(chē)軸軸向?qū)h(huán)形磁鐵B與舵機(jī)驅(qū)動(dòng)固定到一起,構(gòu)成磁鐵B及驅(qū)動(dòng)總成,磁鐵B只能繞車(chē)軸軸線(xiàn)旋轉(zhuǎn)。磁鐵A、B安裝時(shí)應(yīng)保證定子與轉(zhuǎn)子成分離狀態(tài),極性處于“異性相吸”狀態(tài)。
1.2.3 工作原理
在滑板正常滑行的過(guò)程中,即發(fā)電機(jī)處于非工作狀態(tài)(無(wú)阻態(tài))時(shí),控制電路控制磁鐵B及驅(qū)動(dòng)總成,使磁鐵B旋轉(zhuǎn)到特定角度,從而使磁鐵A和磁鐵B上、下半部分都為“異極相吸”狀態(tài),定子及磁鐵A總成被磁鐵B吸引,促使定子及磁鐵A總成與滑板輪及轉(zhuǎn)子總成分離,此時(shí)定子線(xiàn)圈不能切割轉(zhuǎn)子磁場(chǎng),因此沒(méi)有電磁阻力,也不會(huì)進(jìn)行能量回收,滑板輪在旋轉(zhuǎn)過(guò)程中阻力很小。
在滑板需要制動(dòng)的情況下,即發(fā)電機(jī)處于工作狀態(tài)(有阻態(tài))時(shí),控制電路控制磁鐵B及驅(qū)動(dòng)總成,使磁鐵B旋轉(zhuǎn)到特定角度,從而使磁鐵A和磁鐵B上、下半部分都為“同極相斥”狀態(tài),定子及磁鐵A總成整體被磁鐵B排斥,促使定子及磁鐵A總成進(jìn)入滑板輪及轉(zhuǎn)子總成的磁鋼中,此時(shí)定子線(xiàn)圈切割轉(zhuǎn)子磁場(chǎng),產(chǎn)生電磁阻力,使高速轉(zhuǎn)動(dòng)的滑板輪及轉(zhuǎn)子總成由于受到電磁阻力而減速,同時(shí)切割磁場(chǎng)所產(chǎn)生的電能輸送給整流儲(chǔ)能電路儲(chǔ)存起來(lái)。
1.3 整流電路
首先測(cè)出滑板以最高時(shí)速行駛時(shí),輪子轉(zhuǎn)速約為2 300 r/min,發(fā)電機(jī)輸出交流電線(xiàn)電壓約為24 V,頻率約為900 Hz。經(jīng)三相全橋整流,忽略管壓降,可以得到
式中:Ud為整流輸出電壓平均值,ω為交流電壓角頻率,t為時(shí)間。
采用恒流0.5 A給鋰電池充電,穩(wěn)流電路省略不作考慮。忽略功率損耗,流過(guò)整流二極管的電流有效值約為0.4 A,通態(tài)平均電流為0.25 A,考慮2倍裕量,選取額定電流為0.5 A的整流二極管。整流二極管承受的峰值電壓為24 V,考慮2倍裕量,應(yīng)選取額定電壓為48 V的整流二極管[4]。選取肖特基整流二極管SS55搭建三相整流電路,其最大可重復(fù)反向峰值電壓為50 V,平均整流輸出電流為5 A,滿(mǎn)足整流要求。二極管整流后的脈動(dòng)直流,經(jīng)大電容濾波后,紋波已經(jīng)比較小,經(jīng)過(guò)穩(wěn)壓后,可以給鋰電池充電。
1.4 陀螺儀及超聲波模塊
該系統(tǒng)選用了MPU-6050陀螺儀模塊和HC-SR04超聲波模塊進(jìn)行測(cè)試。MPU-6050可測(cè)范圍為±250 °/s、±500 °/s、±1 000 °/s和±2 000 °/s,加速度計(jì)可測(cè)范圍為±2 g、±4 g、±8 g和±16 g,滿(mǎn)足該系統(tǒng)的需求。系統(tǒng)通過(guò)MPU-6050檢測(cè)滑板的運(yùn)動(dòng)姿態(tài),實(shí)現(xiàn)上下坡監(jiān)測(cè)、滑板提起監(jiān)測(cè)、滑板落地監(jiān)測(cè)功能。HC-SR04超聲波模塊探測(cè)距離為2 cm~450 cm,可以實(shí)現(xiàn)對(duì)系統(tǒng)的測(cè)試,系統(tǒng)通過(guò)測(cè)量滑板前方障礙物到滑板的距離,來(lái)判斷前方是否有障礙物。
2 系統(tǒng)控制方案
系統(tǒng)工作時(shí),通過(guò)陀螺儀檢測(cè)滑板的運(yùn)動(dòng)狀態(tài),一旦檢測(cè)到滑板被拿起,單片機(jī)就會(huì)控制舵機(jī)操動(dòng)機(jī)構(gòu)將定、轉(zhuǎn)子分離開(kāi),以減少舵機(jī)對(duì)電能的消耗。當(dāng)滑板正常行駛時(shí),系統(tǒng)設(shè)定滑板向下傾角在10°~45°時(shí)為下坡?tīng)顟B(tài)。如果通過(guò)陀螺儀檢測(cè)到正在下坡,或者超聲模塊檢測(cè)到前方存在障礙物,亦或是單片機(jī)接收到剎車(chē)信號(hào),滿(mǎn)足其中任意一個(gè)條件,單片機(jī)就會(huì)控制舵機(jī)操動(dòng)機(jī)構(gòu)將定子部分推入轉(zhuǎn)子部分,發(fā)電機(jī)開(kāi)始工作。當(dāng)上述3個(gè)條件均不滿(mǎn)足時(shí),單片機(jī)才會(huì)控制舵機(jī),使定、轉(zhuǎn)子部分分離開(kāi),系統(tǒng)不再回收能量,也不再提供制動(dòng)的電磁阻力。
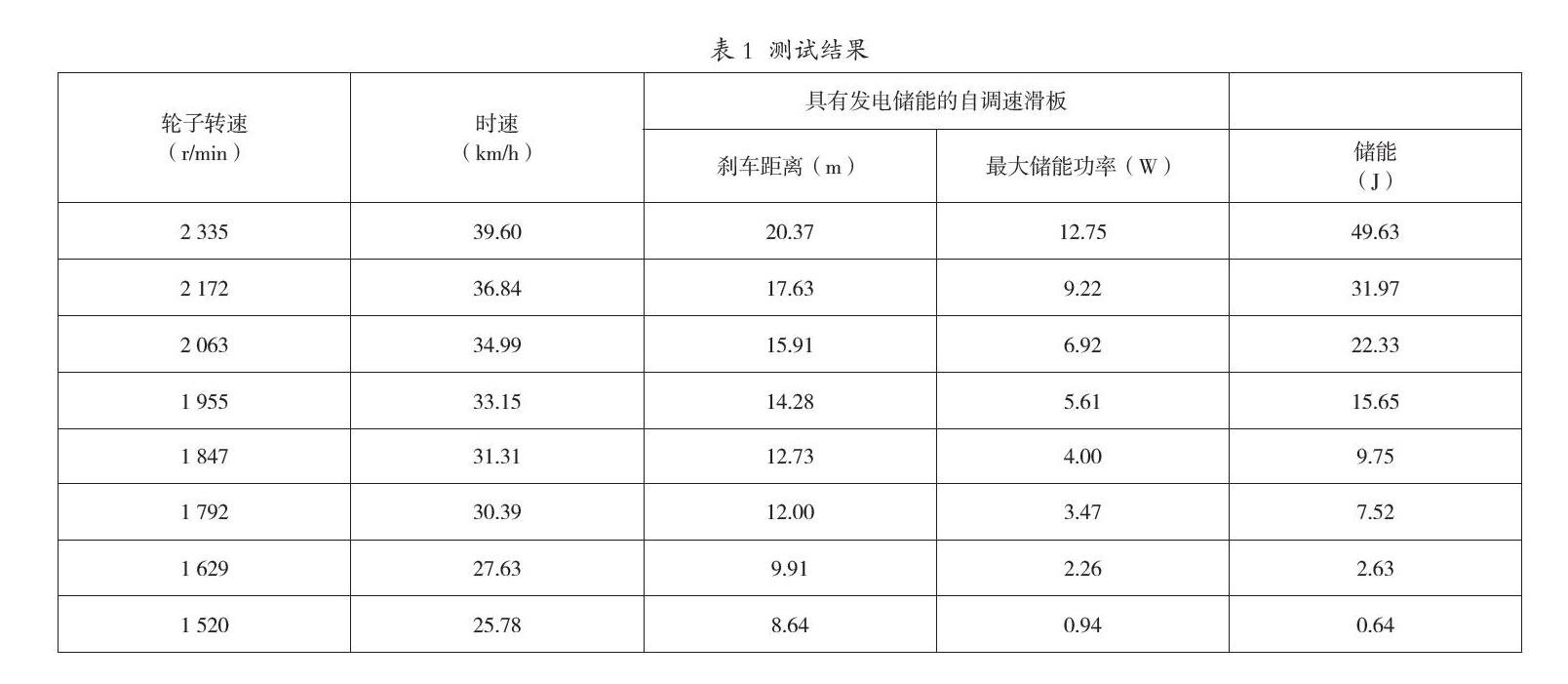
3 整機(jī)實(shí)驗(yàn)與測(cè)試結(jié)果
測(cè)試時(shí)利用GPS進(jìn)行定位,電動(dòng)滑板負(fù)重50 kg,在平坦水泥地進(jìn)行測(cè)試。測(cè)試結(jié)果見(jiàn)表1。
從測(cè)試結(jié)果可以看出,隨著輪子轉(zhuǎn)速的提高,可分離發(fā)電儲(chǔ)能裝置的功率在提升,制動(dòng)能量回收效果較明顯,可行性較高。而進(jìn)行下坡及障礙物測(cè)試時(shí),系統(tǒng)均能正常工作,其測(cè)試回收能量功率與平地剎車(chē)測(cè)試基本相同。
4 結(jié)論
該系統(tǒng)以滑板為載體,采用新型可分離式發(fā)電機(jī)進(jìn)行能量回收,使用STM32單片機(jī)進(jìn)行控制,輔以陀螺儀、超聲避障模塊,實(shí)現(xiàn)智能制動(dòng)能量回收,將回收的電能儲(chǔ)存于鋰電池中,可行性較高。但系統(tǒng)還存在可以改進(jìn)的地方,如鋰電池充放電頻率小、功率密度低、不能迅速儲(chǔ)存大量能量,并且不適合對(duì)制動(dòng)能量進(jìn)行回收。而超級(jí)電容由于不依賴(lài)化學(xué)反應(yīng)實(shí)現(xiàn)能量轉(zhuǎn)化,因此充電速率更快、內(nèi)阻更小、可循環(huán)次數(shù)更多、受溫度影響也小、安全性高,更適合進(jìn)行制動(dòng)能量回收。
該系統(tǒng)不僅能用于電動(dòng)滑板,而且也可以應(yīng)用在一些大型交通工具中。回收的能量可以用于交通工具的啟動(dòng)、照明等多個(gè)方面,提高了能量的利用率,減少了排放。此外,回收的能量用于交通工具起動(dòng)時(shí)的加速,能使設(shè)備能更快地進(jìn)入最佳工況,不僅提高了能量利用的效率,而且還延長(zhǎng)了設(shè)備的壽命。
參考文獻(xiàn)
[1]許強(qiáng),張?jiān)茖帲瘢?汽車(chē)制動(dòng)能量回收方案及比較[J].交通科技與經(jīng)濟(jì),2008(3):59-60.
[2]趙朝會(huì),李遂亮,王新威.徑向和切向結(jié)構(gòu)永磁同步發(fā)電機(jī)的比較研究[J].大電機(jī)技術(shù),2007(4):1-4.
[3]湯蘊(yùn)繆.電機(jī)學(xué) 第五版[M].北京:機(jī)械工業(yè)出版社,2014.
[4]王兆安,劉進(jìn)軍.電力電子技術(shù) 第五版[M].北京:機(jī)械工業(yè)出版社,2020.
 中國(guó)新技術(shù)新產(chǎn)品2020年11期
中國(guó)新技術(shù)新產(chǎn)品2020年11期
- 中國(guó)新技術(shù)新產(chǎn)品的其它文章
- 鹽堿地綠化技術(shù)在海昌海洋主題公園綠化工程中的應(yīng)用
- 水利工程管理及其養(yǎng)護(hù)問(wèn)題分析
- 網(wǎng)絡(luò)通信技術(shù)在移動(dòng)式無(wú)液氦MRI設(shè)備中的應(yīng)用
- 小區(qū)停車(chē)場(chǎng)后臺(tái)管理子系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)
- 試論現(xiàn)代商場(chǎng)消防監(jiān)督技術(shù)體系構(gòu)建對(duì)策
- 基于灰色關(guān)聯(lián)分析的行車(chē)安全評(píng)價(jià)研究