基于多重測量矢量的含旋轉部件目標ISAR成像方法
2020-09-07 00:30:34蔣國建李開明
空軍工程大學學報 2020年4期
張 群, 蔣國建, 康 樂, 李開明
(空軍工程大學信息與導航學院,西安,710077)
在逆合成孔徑雷達(Inverse Synthetic Aperture Radar,ISAR)成像中[1],為簡化處理,一般假設目標為剛體目標,此時目標上所有散射點都具有相同的運動參數。然而在實際成像時,目標往往不滿足剛體模型,目標中部分散射點的運動狀態較為復雜,存在機械振動、旋轉運動等運動形式,對雷達回波信號產生頻率調制,這種調制稱之為“微多普勒(Micro-Doppler)效應”[2-4]。微多普勒效應廣泛存在于實際目標中,如螺旋槳飛機、直升機、彈道導彈、大型艦船等。當采用傳統的距離-多普勒(Range-Doppler,R-D)算法對此類目標進行成像時,微多普勒效應會對目標主體信號產生干擾,表現為在ISAR圖像中附加的干擾條帶,降低了目標的ISAR圖像質量。解決這一問題,主要有兩種思路,一是從目標回波中剔除旋轉部件信號以實現對目標主體成像,二是通過分離目標主體和旋轉部件的信號,分別進行成像處理。基于前一種思路,文獻[5]利用Chirplet分解剔除了活動部件的成像干擾分量,并對成像圖進行輪廓特征提取。但是,這類方法注重微動信號的分離和抑制,僅能獲得目標主體部分的ISAR圖像,損失了目標旋轉部件的信息。而基于后一種思路,文獻[6]利用Hough變換在譜圖域分離了目標主體信號和旋轉部件信號,實現了具有大旋翼的空中目標ISAR成像;文獻[7]在雙基地ISAR系統中對含旋轉部件目標進行了研究,提出了一種修正的擴展Hough方法,成功分離了目標的微多普勒信號。然而,文獻[6~7]均屬于圖像域處理的方法,當微動散射點較多時,在距離慢時間像中剔除微動信號會導致主體信號的嚴重缺損,從而影響成像質量。由于這一問題在圖像域處理難以避免,因此需要考慮基于信號域處理的旋轉部件信號分離方法。
壓縮感知(Compressed Sensing, CS)理論是由數學家Donoho于2006年提出的一種新的信號獲取與處理理論[8]。2007年,Baraniuk等人首次將CS理論應用到雷達成像中,證明了壓縮感知雷達成像的可行性[9]。CS理論中的基本模型就是從單重測量信號中恢復未知的稀疏信號,稱之為單重測量矢量(SMV)模型。多重測量矢量(MMV)模型是在SMV模型的基礎上被提出的,即從多重測量信號中恢復具有相同稀疏結構的未知稀疏信號。目前基于MMV模型的重建算法主要有凸優化算法、貪婪算法和基于時序結構的稀疏貝葉斯算法三類[10]。文獻[11]對MMV模型在ISAR成像中的應用進行了研究,將ISAR成像過程中的所有一維距離像作為一個整體,而后將ISAR成像問題轉化為MMV模型的稀疏重構問題并對其優化求解。
本文主要將MMV模型應用到含旋轉部件目標ISAR成像中。首先建立了含旋轉部件目標的ISAR成像轉臺模型,分別對目標主體信號和旋轉部件信號的多普勒進行分析,得出目標主體信號在方位向的稀疏性和旋轉部件信號在方位向的非稀疏性;而后建立目標主體信號的線性模型,找到目標主體信號在方位向的固定支撐集。通過低維觀測信號與恢復矩陣,利用MMV-OMP算法即可獲得目標主體信號的成像結果。在此基礎上,從回波信號分離得到旋轉部件信號,并利用逆Radon變換對其進行成像。
本文組織結構如下:第1節簡單介紹了壓縮感知基本理論與MMV模型,第2節建立了含旋轉部件目標信號模型,第3節提出了含旋轉部件目標ISAR成像方法,第4節通過仿真實驗來驗證本文方法的有效性,最后一節是結論。
1 壓縮感知基本理論與MMV模型
假設一個未知的N維信號x可以被線性表示,即:x=Ψs,Ψ為基矩陣。如果系數向量s中存在k(k?N)個非零元素,則稱s為信號x在基矩陣Ψ上的k稀疏表示。
如果利用低維觀測矩陣Φ對信號x進行觀測,則得到M維的觀測信號y,可以表示為:
y=Φx=ΦΨs=Acss
(1)
其中Acs=ΦΨ。對于上式的求解,如果Acs滿足約束等距特性(Restricted Isometry Property, RIP),可將其轉化為最小l1范數凸優化問題[12]:
min‖s‖1, s.ty=Acss
(2)
(3)
對于M個N維信號x來說,如果每個信號的稀疏結構相同,那么可以利用觀測矩陣Φ對M個信號同時進行觀測,得到M個觀測結果,即:
Y=ΦX
(4)
式中:X=[x1,x2,…,xM],Y=[y1,y2,…,yM]。這種利用信號稀疏結構特性的CS觀測模型稱為多重測量矢量(MMV)模型[13]。
2 含旋轉部件目標信號模型
假設目標的平動補償已經完成,則ISAR成像模型可以用轉臺模型表示,如圖1所示。圖中O點為目標成像中心,成像投影平面由坐標系XOY構成,雷達到目標成像中心的距離為Rref。在成像時間內,主體散射點P的坐標為(x,y),以角速度ω勻速轉動,到成像中心的距離為Rp,初相為θ0。坐標系UO′V中,旋轉散射點Q以角速度ωQ繞O′作半徑為rQ的勻速圓周運動,初相為θQ。
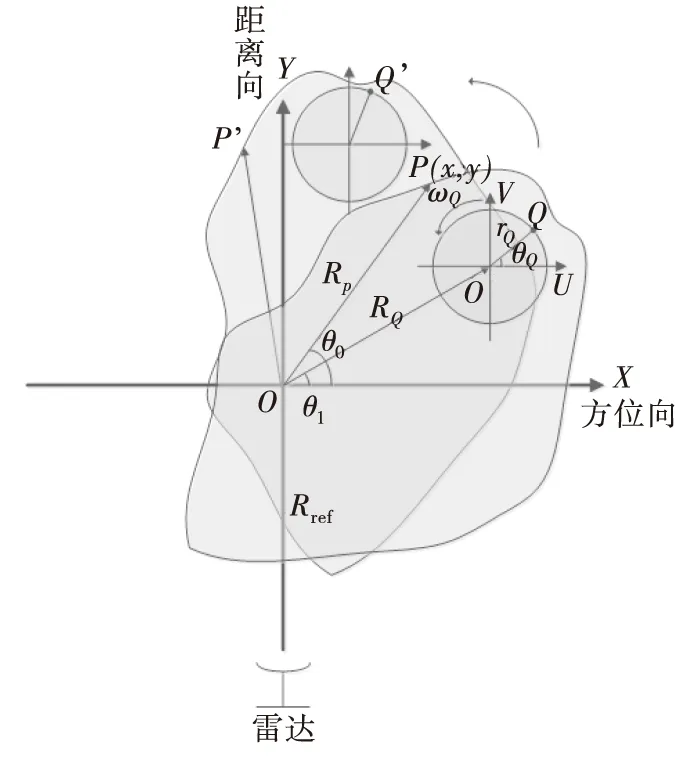
圖1 含旋轉部件目標轉臺模型
雷達發射線性調頻信號:
(5)

(6)
式中:σPi、σQk分別為第i個主體散射點和第k個旋轉散射點的散射系數;c為光速;λ=c/fc為波長;RΔi(tm)=Ri-Rref,RΔk(tm)=Rk-Rref,Ri、Rk分別表示主體散射點與旋轉散射點到雷達的距離。
對式(6)進行距離壓縮后,得到距離壓縮信號為:
(7)
式中:B為帶寬。
由圖1可得,主體散射點P對應的RΔP為:
RΔP(tm)=RPsin(ωtm+θ0)
(8)
在小角度觀測條件下,sinωtm≈ωtm,cosωtm≈1,則P點的多普勒為:
(9)
而對于旋轉散射點Q,其對應的RΔQ為:
RΔQ(tm)=RQsin(ωtm+θ1)+rQsin(ωQtm+θQ)
(10)
同理可以推出Q點的多普勒為:

(11)
由式(9)、(11)可得主體散射點的多普勒為恒定值,因此對目標主體信號在方位向做傅里葉變換就可以實現方位向聚焦。而旋轉散射點的多普勒附加了一個正弦調頻信號,直接在方位向做傅里葉變換將導致散焦,產生寬度與旋轉半徑為正比的干擾條帶。
3 含旋轉部件目標ISAR成像方法
3.1 目標主體回波分離與成像
在小角度觀測條件下,RΔP(tm)≈xωtm+y,由此可將目標主體的基頻回波信號重新表示為[14]:
(12)
式中:σ(x,y)表示目標主體的散射系數。
(13)
將式(13)代入式(12)得到目標主體的ISAR觀測信號離散模型為:
(14)
式中:n=0,1,…,N-1;m=0,1,…,M-1;l=0,1,…,L-1;h=0,1,…,H-1。上式可以表示為:
S1=FσΦ
(15)

對主體回波信號S1進行距離壓縮,可將主體回波距離壓縮信號Sr1表示為:
Sr1=S1Φ-1=Fσ
(16)
此時將目標回波距離壓縮信號重新表示為:
Sr=Sr1+Sr2=Fσ+Sr2
(17)
式中:Sr2為旋轉散射點的回波信號S2進行距離壓縮后得到的信號,具體表示為:
(18)
在ISAR成像中,單個脈沖信號進行距離壓縮后可以得到目標強散射點在距離向上的信息,對于多個脈沖信號形成的回波矩陣來說,距離壓縮以后就可以得到目標的距離-慢時間譜圖,在目標不越距離單元徙動時,則對于目標主體散射點來說,目標主體散射中心回波距離壓縮后的能量聚集于固定的某個距離單元內,多個脈沖中包含的距離向信息相同,其距離-慢時間譜圖由直線譜構成。因此可以將MMV模型應用到ISAR成像中,如圖2所示。
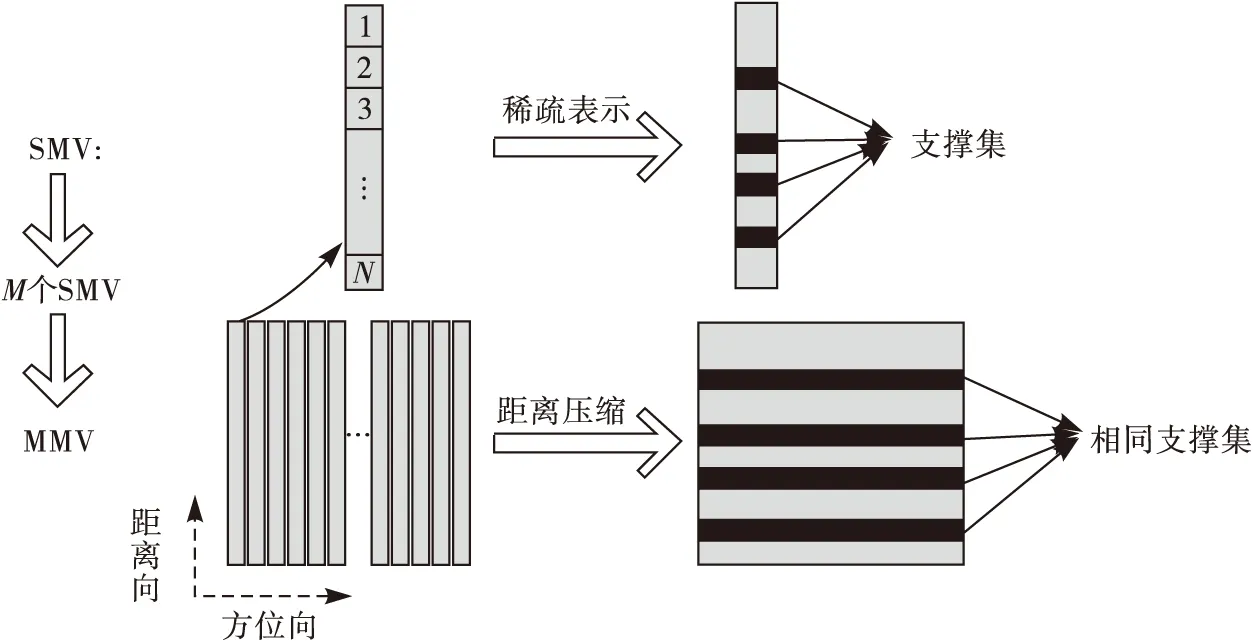
圖2 MMV模型
在CS理論中,Acs需滿足RIP性質,文獻[15]已證明當觀測矩陣Φ和基矩陣Ψ不相干時,Acs高概率滿足RIP性質。本文選擇廣義單位陣Φ=[φk,m]作為觀測矩陣,其中(k=1,2,…,K;m=1,2,…,M)。滿足與傅里葉基F不相干。在Φ中的任意行向量Φk中,隨機選取一個元素為1,其他元素均為0。對距離壓縮后的回波信號Sr進行觀測得到:
(19)
在得到觀測結果后,可由恢復矩陣Acs通過求解凸優化問題來求解。由于取得的支撐集中只包含有目標主體回波的信息,因此利用此恢復矩陣求解的解中不包含有旋轉部件回波的信息,從而剔除旋轉部件對目標主體信號的干擾。本文利用MMV-OMP重構算法對信號進行求解,具體流程如表1所示。
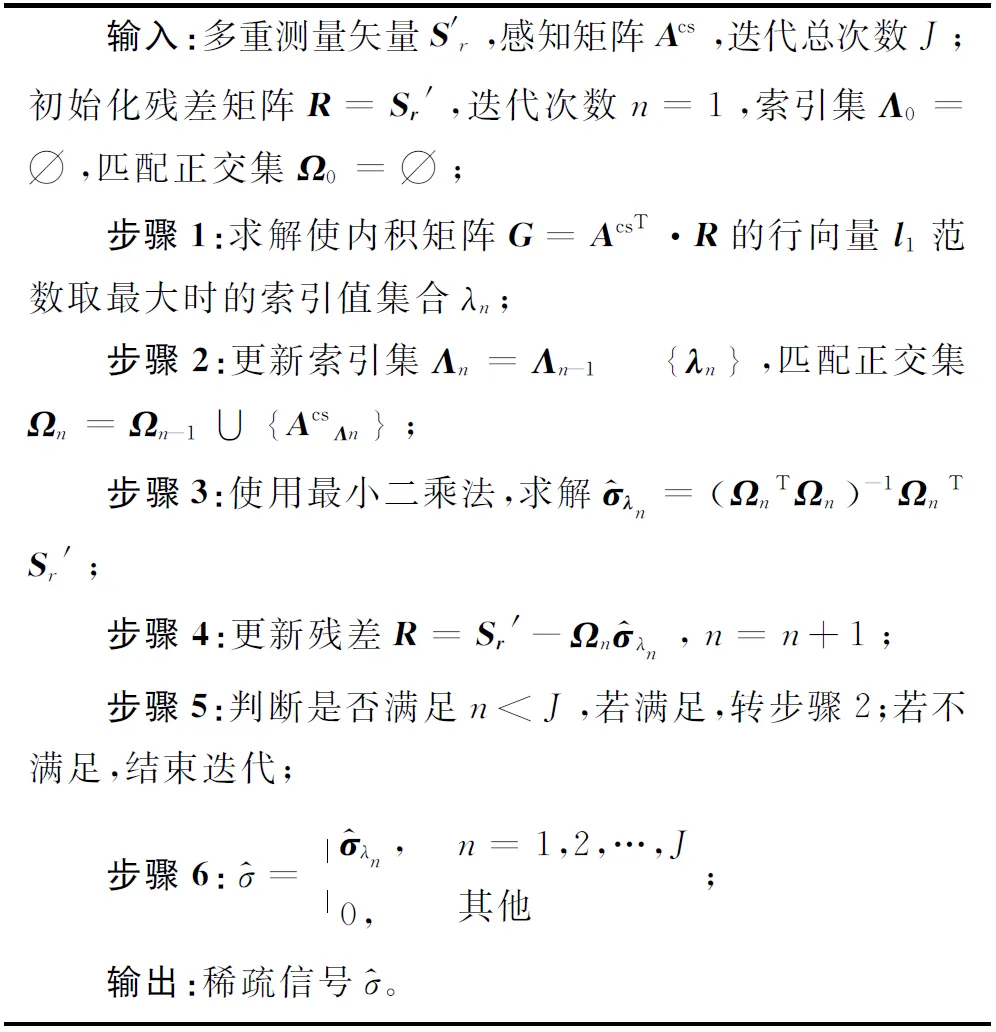
表1 多重觀測矢量模型-正交匹配追蹤算法
3.2 基于逆Radon變換的旋轉部件成像
在得到目標主體ISAR像以后,就可以利用其主體散射點分布來生成主體回波信號,從而在回波信號中減去主體回波信號,即可得到旋轉部件回波信號,對旋轉部件回波信號利用逆Radon變換進行成像。
由式(7)可得旋轉散射點Q的距離壓縮回波信號為:
(20)
將式(10)代入上式,并在小角度觀測條件下進行化簡得散射點Q的距離壓縮回波信號包絡為:
mag{sQ(r,tm)}=σQB·
(21)
由上式可得旋轉散射點Q在距離-慢時間的譜圖為一條以RQsinθ1為中心的正弦曲線,幅度為rQ,周期與旋轉散射點Q相同。
逆Radon變換可以實現正弦曲線到參數空間的映射[16]。將旋轉散射點Q的距離-慢時間包絡寫為如下形式:
f(r,θ)=δ(r-rQsin(θ+θQ))
(22)
其逆Radon變換后圖像為:
g(x,y)=
drdkxdky=δ(x-rQsinθQ)δ(y-rQcosθQ)
(23)
式中:kx=vcosθ,ky=vsinθ。因此,利用逆Radon變換就可以實現旋轉散射點在成像平面的重建。
4 仿真分析
4.1 點目標仿真實驗
首先進行點目標仿真實驗。仿真參數設置如下:雷達載頻fc為10 GHz,帶寬B為600 MHz,發射線性調頻信號,脈沖寬度Tp為10-6s,PRF為256 Hz,目標運動速度為300 m/s。假設目標由5個非旋轉散射點和2個旋轉散射點組成,如圖3(a)所示。其中2個旋轉點(圖中用“*”標出)的初始坐標分別為(3 m,0 m)和(0 m,3 m),旋轉中心為成像中心,旋轉半徑為3 m,旋轉頻率為12 Hz。
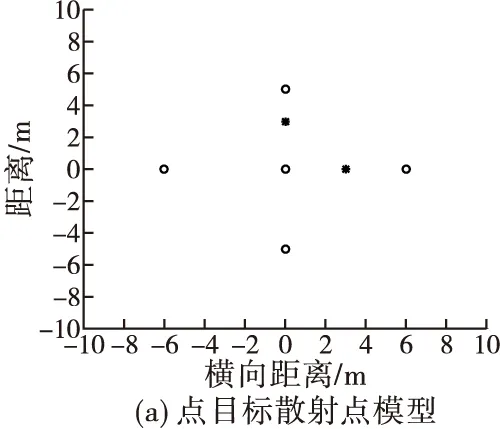
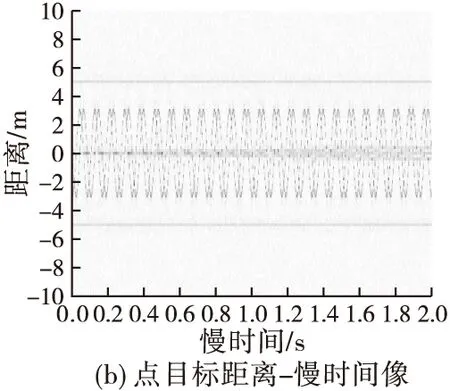
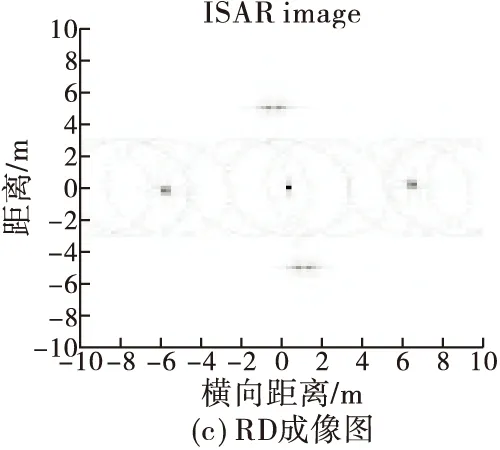
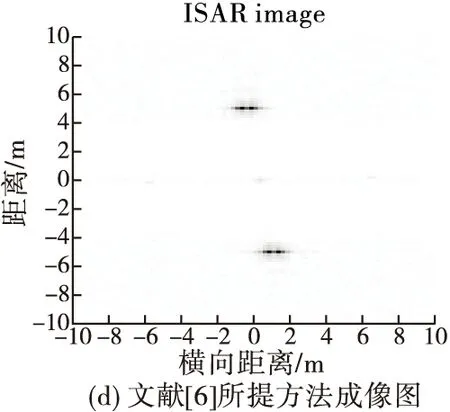
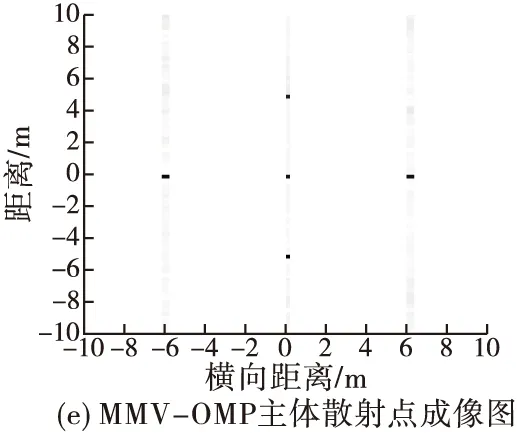
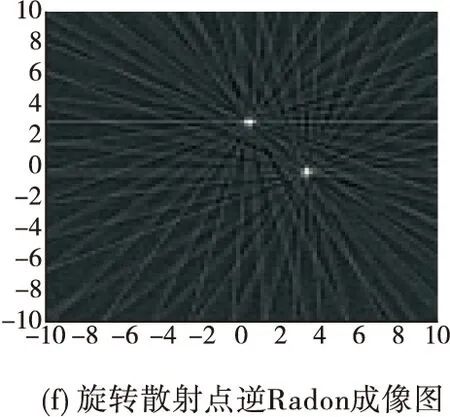
圖3 點目標仿真結果
在回波信號中加入了高斯白噪聲,信噪比SNR為-13 dB。圖3(b)是點目標的距離-慢時間像,從圖中可以看出目標的距離-慢時間像由非旋轉散射點的直線譜和旋轉散射點的正弦曲線譜構成。對回波信號利用傳統的距離多普勒(RD)算法直接成像,得到的結果如圖3(c)所示:由于旋轉散射點的存在,ISAR圖像中附加了沿多普勒方向的調制干擾帶,成像結果受到了污染。圖3(d)是利用文獻[6]所提圖像域處理方法成像結果,由于旋轉散射點旋轉頻率較高,由圖3(b)可以看出旋轉散射點的正弦曲線譜較為密集,而利用文獻[6]所提方法不僅僅會去掉距離慢時間譜圖中的正弦曲線譜,也會使旋轉散射點譜圖和主體散射點譜圖相交處均置0,從而導致主體信號嚴重缺損,從圖中可以看出,處于旋轉散射點覆蓋距離單元內的3個主體散射點成像效果較差。圖3(e)是利用本文所提方法成像結果,可以看出得到的目標主體像已基本消除了旋轉散射點的影響,對比圖像域處理方法也不會丟失主體散射點的信息,ISAR圖像的質量得到了提高。圖3(f)為利用逆Radon變換對旋轉散射點回波進行成像結果。為進一步比較RD成像圖與本文所提方法成像圖的成像質量,分別計算點目標原圖(不包含2個旋轉散射點)、文獻[6]所提方法成像圖、RD成像圖、和本文所提方法成像圖的圖像熵,如表2所示,可以看出RD成像圖的圖像熵值和文獻[6]所提方法成像圖的圖像熵值相比原圖熵值較大,本文所提方法成像圖的圖像熵值較低,聚焦效果較好,同時相比其他兩種成像方法成像圖更接近原圖圖像熵值,成像質量較高。

表2 圖像熵值比較
4.2 直升機模型仿真實驗
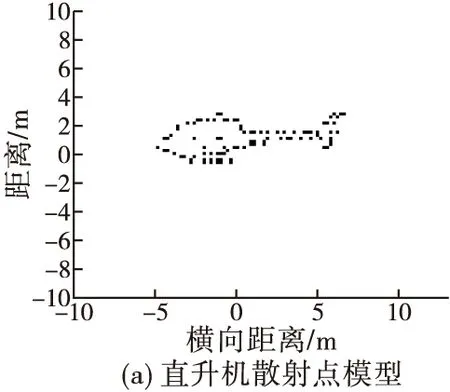
為進一步驗證本文所提方法的有效性,采用64個散射點構成的直升機仿真模型進行仿真實驗。仿真參數設置如下:雷達載頻fc為10 GHz,帶寬B為600 MHz,發射線性調頻信號,脈沖寬度Tp為10-6s,PRF為300 Hz,目標運動速度為100 m/s。設置3個旋轉散射點模擬直升機水平旋翼的旋轉,旋轉半徑均為2 m,旋轉頻率為6.566 7 Hz。
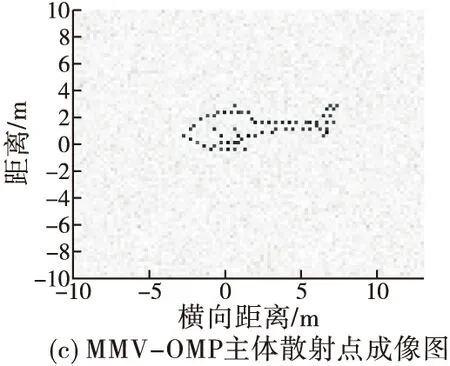
在回波信號中加入了信噪比SNR為-13 dB的高斯白噪聲,圖4(a)為直升機散射點模型。首先對回波信號利用傳統的距離多普勒(RD)算法直接成像,得到的結果如圖4(b)所示。由于旋轉部件產生的微多普勒效應,對ISAR主體像產生了污染,成像效果不佳。而后利用本文所提方法首先對ISAR主體部分進行成像,由圖4(c)可以看出,目標的固定散射點基本被重構出來,成像效果較佳。圖4(d)為利用逆Radon變換對旋轉散射點回波進行成像的結果,通過此圖像可以得到3個旋轉散射點相對旋轉中心的初始位置。
在回波信號中分別加入信噪比SNR為-8 dB,-13 dB,-18 dB的高斯白噪聲,同時使用本文所提方法和文獻[6]所提方法分別進行成像,得到的成像結果如圖5、6所示。利用成像結果和原圖計算均方誤差(MSE)來衡量圖像重建質量,結果如表3所示。通過對比本文所提方法在不同信噪比下的成像結果和MSE可以發現,隨著SNR的降低,圖像重建誤差逐漸增大,成像質量逐漸下降。這是由于噪聲的增大,干擾了距離壓縮信號和恢復矩陣的相關性,使得成像質量下降。同時比較同一信噪比下不同成像算法的成像結果和MSE可以發現,利用本文方法所得ISAR像重建誤差均小于文獻[6]所提方法得到的ISAR像重建誤差,因此本文所提方法的成像效果優于文獻[6]所提方法。
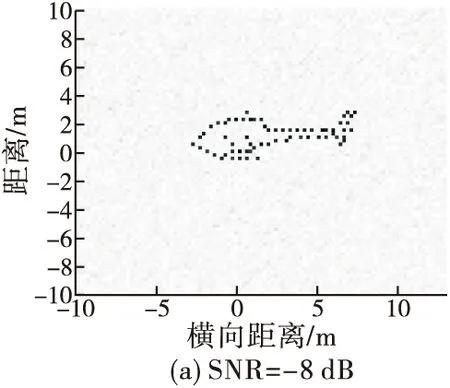

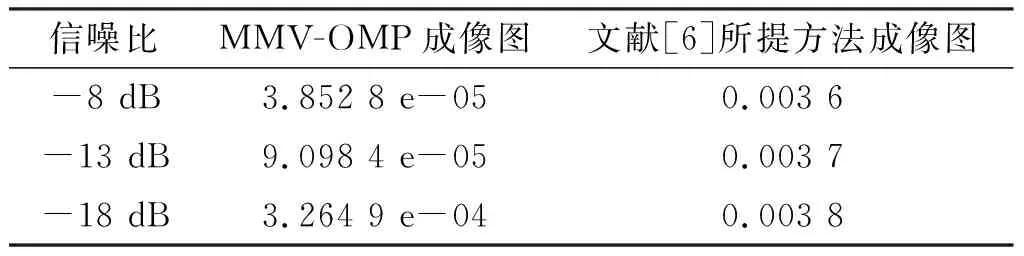
表3 不同信噪比下圖像重建誤差
綜上所述,本文所提方法可以在信噪比較高的條件下利用含旋轉部件目標的回波信號分別得到目標主體的ISAR像和旋轉部件的ISAR像,避免了圖像域處理方法中主體回波信息丟失的缺陷,有效提高了目標主體的ISAR像質量。
5 結語
本文針對含旋轉部件目標的ISAR成像問題,提出了一種基于多重測量矢量的含旋轉部件目標ISAR成像新方法,利用主體信號和旋轉部件信號在方位向的稀疏性差異,通過尋找主體信號在方位向的固定支撐集,對距離壓縮信號進行重構求解,得到了目標主體的ISAR像。而后利用目標主體像來生成主體回波信號,以此得到旋轉部件回波信號,并利用逆Radon變換對旋轉部件進行成像。仿真實驗驗證了該方法的有效性。
猜你喜歡
南大法學(2021年3期)2021-08-13 09:22:32
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
自然與文化遺產研究(2016年2期)2016-05-17 05:53:59
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
山西大同大學學報(社會科學版)(2015年6期)2015-01-22 07:22:22