基于單片機(jī)的淤泥質(zhì)海岸垃圾清理船控制系統(tǒng)設(shè)計(jì)
2020-09-08 04:04:44王穩(wěn)張建偉馬燕飛張雷林金陽(yáng)路萬(wàn)鵬
機(jī)械工程師 2020年8期
關(guān)鍵詞:單片機(jī)設(shè)計(jì)
王穩(wěn), 張建偉, 馬燕飛, 張雷, 林金陽(yáng), 路萬(wàn)鵬
(浙江海洋大學(xué) 港航與交通運(yùn)輸工程學(xué)院,浙江 舟山316022)
關(guān)鍵字:泥質(zhì)海岸;清理船;智能化;單片機(jī)
0 引 言
我國(guó)淤泥質(zhì)海岸灘涂總面積超過(guò)217 萬(wàn)公頃,其主要位于遼寧、山東、臺(tái)灣、海南及江浙一帶等海濱地帶。此區(qū)域內(nèi)適合養(yǎng)殖和旅游等產(chǎn)業(yè)的發(fā)展,但由于垃圾的污染問(wèn)題,使得目前大面積的淤泥海岸無(wú)法得到有效利用。在浙江省內(nèi),如舟山、寧波等旅游城市,海岸垃圾更是成為影響市容市貌的原因之一;此外,浙江省內(nèi)海漂垃圾污染情況最嚴(yán)重的地區(qū)為寧波象山縣石浦皇城,2015年該地區(qū)每平方公里岸灘上分布有329 000余個(gè)垃圾。另外,海岸垃圾由于潮汐作用會(huì)進(jìn)入海洋,而海洋垃圾污染問(wèn)題正成為各國(guó)政府廣泛關(guān)注的環(huán)保問(wèn)題之一,海洋垃圾不僅對(duì)海洋生態(tài)造成了破壞,而且白色垃圾所產(chǎn)生的有害物質(zhì),如塑料顆粒已經(jīng)在各類海洋動(dòng)物體內(nèi)被檢測(cè)出來(lái),這已危及人類自身。因此,目前解決海岸垃圾污染問(wèn)題是必要的,這不僅僅是為了保護(hù)生態(tài)環(huán)境,更是為人類的可持續(xù)發(fā)展奠定基礎(chǔ)。本文主要根據(jù)現(xiàn)有淤泥質(zhì)海岸垃圾清理船結(jié)構(gòu)設(shè)計(jì)的控制部分進(jìn)行探究[1-2],提出了基于單片機(jī)的淤泥質(zhì)海岸垃圾清理船控制系統(tǒng)設(shè)計(jì),以完善裝置設(shè)計(jì),實(shí)現(xiàn)清理船工作的智能化。
1 淤泥質(zhì)海岸垃圾清理船
2016-2018年《中國(guó)海洋環(huán)境狀況公報(bào)》的相關(guān)統(tǒng)計(jì)數(shù)據(jù)如表1所示,可以看出:我國(guó)海灘垃圾平均個(gè)數(shù)在2017年有明顯降低,2018年又略有升高,海灘垃圾平均密度逐年降低,但塑料類垃圾占比逐年升高,由此可以看出,目前我國(guó)針對(duì)海岸垃圾處理的效果并不顯著[3-5]。海岸垃圾隨潮汐進(jìn)入海洋,又會(huì)對(duì)海洋生態(tài)環(huán)境造成破壞,污染極大。
本文所設(shè)計(jì)的控制系統(tǒng)是在淤泥質(zhì)海岸垃圾清理船的基礎(chǔ)上實(shí)現(xiàn)的,船體結(jié)構(gòu)如圖1所示。清理船由船頭、船尾、船身組成,其中垃圾收集機(jī)構(gòu)由耙釘型傳送帶和垃圾掃板組成;垃圾輸送機(jī)構(gòu)由輸送傳送帶實(shí)現(xiàn);垃圾淤泥分離機(jī)構(gòu)由攪拌桿、儲(chǔ)水艙、噴頭和輸送泵組成;垃圾取出機(jī)構(gòu)由垃圾儲(chǔ)存框、螺桿和限位板組成,以上4種機(jī)構(gòu)構(gòu)成了淤泥質(zhì)海岸垃圾清理船的主體結(jié)構(gòu)[1-2]。
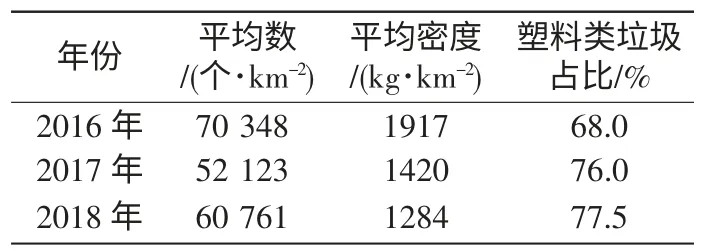
表1 2016-2018年中國(guó)海灘垃圾污染狀況
2 設(shè)計(jì)方案
本文所設(shè)計(jì)的系統(tǒng)可實(shí)現(xiàn)智能巡航模式、自主巡航模式、遙控模式、自動(dòng)返航。智能巡航模式適用于作業(yè)區(qū)域內(nèi)垃圾分布零散、數(shù)量少的情況,通過(guò)垃圾定位系統(tǒng),待清理船運(yùn)動(dòng)至垃圾前方時(shí)啟動(dòng)垃圾收集機(jī)構(gòu)及垃圾淤泥分離機(jī)構(gòu),清理完畢后停止機(jī)構(gòu)運(yùn)行,以降低能耗,提高清理船續(xù)航能力。自主巡航模式適用于作業(yè)區(qū)域內(nèi)垃圾分布密集、數(shù)量多的情況,垃圾收集及垃圾淤泥分離機(jī)構(gòu)持續(xù)運(yùn)行,在清理船巡航的過(guò)程中將沿途垃圾進(jìn)行清理,有效提高清理船的垃圾清理效率。遙控模式適用于清理船自動(dòng)控制失效的情況,在清理船出現(xiàn)系統(tǒng)故障,或裝置本身發(fā)生故障時(shí),可通過(guò)遙控模式實(shí)現(xiàn)清理船的手動(dòng)返航。自動(dòng)返航工功能,根據(jù)垃圾儲(chǔ)存框下安裝的質(zhì)量傳感器實(shí)時(shí)傳輸?shù)臄?shù)據(jù),能夠?qū)崿F(xiàn)清理船垃圾存儲(chǔ)量達(dá)到上限時(shí)的自動(dòng)返航。控制系統(tǒng)結(jié)構(gòu)如圖2所示。
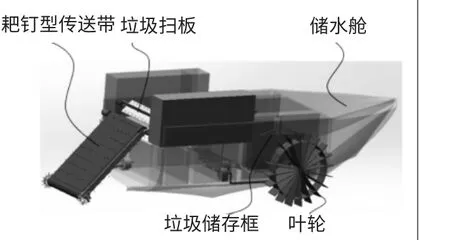
圖1 清理船三維圖
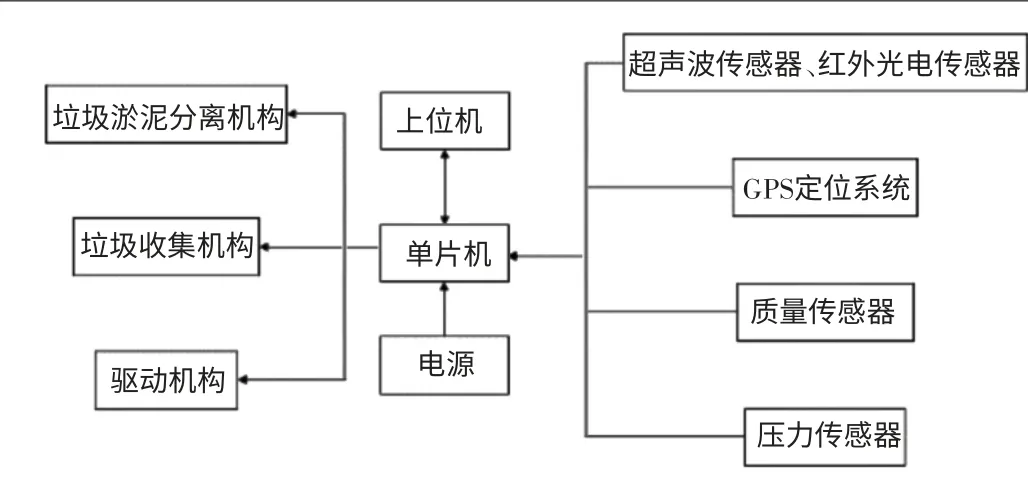
圖2 控制系統(tǒng)結(jié)構(gòu)圖
3 清理船控制系統(tǒng)設(shè)計(jì)
3.1 主控系統(tǒng)
為實(shí)現(xiàn)清理船上述功能,本設(shè)計(jì)采用Arduino Uno R3作為主控單片機(jī),該單片機(jī)由歐洲科研人員開(kāi)發(fā),以ATmenga 328p AU為內(nèi)核,時(shí)鐘頻率為16 MHz,F(xiàn)lash內(nèi)存32 kB,數(shù)字引腳口0~13,模擬引腳口A0~A5,默認(rèn)輸入信號(hào)0~5 V。單片機(jī)工作電壓為5 V,最大電流40 mA,可用USB供電或用外接7~12 V的直流電源供電。單片機(jī)的使用需下載Arduino IDE軟件安裝于電腦,軟件安裝后雙擊點(diǎn)開(kāi),進(jìn)行開(kāi)發(fā)環(huán)境配置,插入開(kāi)發(fā)板后,系統(tǒng)USB驅(qū)動(dòng)自動(dòng)安裝,在工具欄中選擇對(duì)應(yīng)端口,再在文件欄中選擇示例,點(diǎn)擊Blink程序后即可進(jìn)行程序編寫(xiě),操作界面中的對(duì)號(hào)表示啟動(dòng)編譯,箭頭表示將程序上傳至單片機(jī)。
3.2 清理船智能巡航及自主巡航模式
由于不同工作環(huán)境下海岸垃圾的分布不同,考慮到降低清理船能耗的問(wèn)題,在海岸垃圾密度小時(shí),清理船以智能巡航模式工作,系統(tǒng)設(shè)計(jì)如圖3所示;在海岸垃圾密度大時(shí),清理船采用自主巡航模式工作。智能巡航模式下,垃圾定位系統(tǒng)不斷檢測(cè)清理船正前方是否存在垃圾,若存在垃圾,則單片機(jī)控制垃圾收集機(jī)構(gòu)動(dòng)作,當(dāng)垃圾收集完畢后,垃圾收集機(jī)構(gòu)停止工作,清理船繼續(xù)巡航;自主巡航模式下,垃圾收集機(jī)構(gòu)持續(xù)動(dòng)作收集垃圾,單片機(jī)控制垃圾定位系統(tǒng)停止工作。
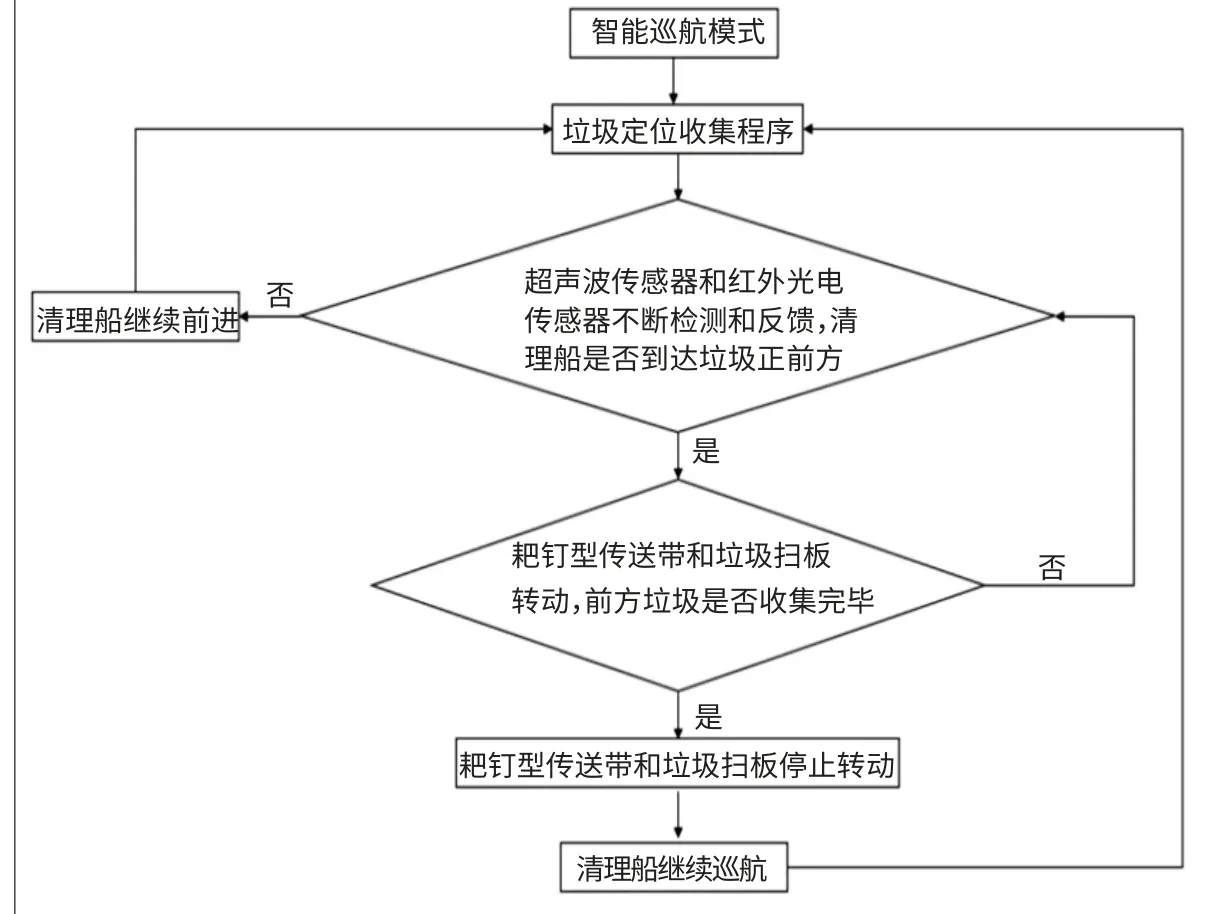
圖3 垃圾定位系統(tǒng)圖
在垃圾定位系統(tǒng)傳感器的選擇上,常用的傳感器有紅外光電傳感器、超聲波傳感器和激光傳感器等。由于激光傳感器造價(jià)昂貴,又考慮到本設(shè)計(jì)對(duì)障礙物測(cè)距精度要求不高,因此不選用此種傳感器;超聲波傳感器實(shí)用性強(qiáng),但由于超聲波束角度過(guò)大,因此只能得到簡(jiǎn)單的與障礙物之間的距離;紅外光電傳感器只能判斷障礙物是否存在,不能確定與障礙物的距離信息。從以上分析可以看出,激光傳感器并不適用,而超聲波傳感器和紅外光電傳感器各具優(yōu)缺點(diǎn),因此本設(shè)計(jì)考慮同時(shí)使用超聲波傳感器和紅外光電傳感器,輔以多傳感器信息融合技術(shù),實(shí)現(xiàn)垃圾的定位。GPS系統(tǒng)可提前對(duì)海岸進(jìn)行路徑規(guī)劃,以實(shí)現(xiàn)清理船在一定區(qū)域內(nèi)的巡航。垃圾定位傳感器參數(shù)如表2所示。

表2 超聲波模塊、紅外模塊參數(shù)表
3.3 清理船遙控模式
本文所設(shè)計(jì)的清理船控制系統(tǒng)中的遙控模式,主要是為了防止清理船自動(dòng)系統(tǒng)失控后船體難以回收問(wèn)題的發(fā)生。當(dāng)清理船工作過(guò)程中發(fā)生自動(dòng)控制失效或難以自主返航時(shí),清理船的遙控模式可通過(guò)上位機(jī)遙控清理船返航。由于系統(tǒng)設(shè)計(jì)中上位機(jī)只需滿足遙控返航的功能,因此,為降低上位機(jī)的開(kāi)發(fā)成本,本設(shè)計(jì)中選擇使用Arduino Uno R3單片機(jī)為控制中心及相應(yīng)的物聯(lián)網(wǎng)WIFI模塊,從而可使用此系列單片機(jī)現(xiàn)有的人機(jī)交互平臺(tái),即手機(jī)微信公眾號(hào)進(jìn)入亞博智能科技,進(jìn)行簡(jiǎn)單的WIFI配置即可通過(guò)手機(jī)實(shí)現(xiàn)清理船的返航操控。其中,藍(lán)牙模塊輸入電壓為3.6~6.0 V,默認(rèn)波特率為9600,信號(hào)有效傳輸距離10 m,因此,遙控模塊中需加配功率放大器。
微信公眾號(hào)配網(wǎng)步驟:1)WIFI模塊供電;2) 在WIFI模塊上,長(zhǎng)按G按鍵,直至藍(lán)色的指示燈亮后松手;3)微信掃描相應(yīng)二維碼,點(diǎn)擊“配置設(shè)備上網(wǎng)”;4)輸入當(dāng)前無(wú)線網(wǎng)絡(luò)密碼并連接;5)進(jìn)行設(shè)備的搜索掃描,點(diǎn)擊界面中搜索到的“Arduino套件物聯(lián)網(wǎng)控制”;6)點(diǎn)擊“綁定設(shè)備”,即完成配網(wǎng)。
4 垃圾收集機(jī)構(gòu)分析
為了保證清理船的垃圾收集機(jī)構(gòu)在反復(fù)工作狀態(tài)下不會(huì)發(fā)生強(qiáng)度失效,本文對(duì)垃圾收集機(jī)構(gòu)的關(guān)鍵部件進(jìn)行應(yīng)力及位移分析,以證明清理船設(shè)計(jì)的合理性,同時(shí)也為后期成品的制作提供理論依據(jù)。考慮到淤泥海岸垃圾種類、數(shù)量及粘連淤泥等情況,設(shè)計(jì)耙釘型傳送帶,垃圾掃板主體采用鋼材。在有限元分析中,夾具作用面為傳送帶側(cè)面和垃圾掃板兩軸端,對(duì)其垃圾運(yùn)輸面和垃圾掃板的板面施加載荷,獲得應(yīng)力分析圖和位移分析圖,如圖4~圖7所示。從圖中數(shù)據(jù)可以看出,傳送帶垃圾運(yùn)輸面承受的最大應(yīng)力遠(yuǎn)遠(yuǎn)低于屈服力,且位移距離極小。
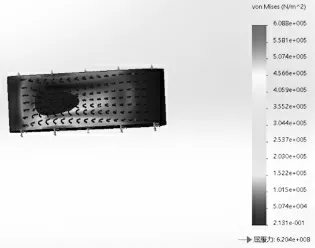
圖4 傳送帶應(yīng)力分析圖
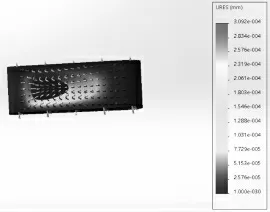
圖5 傳送帶位移分析圖
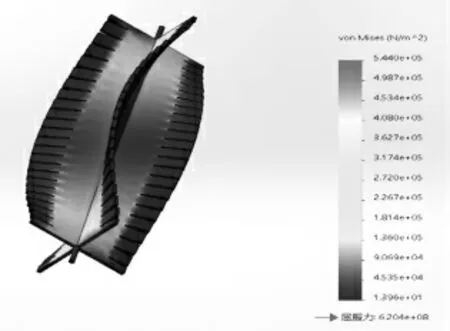
圖6 垃圾掃板應(yīng)力分析圖
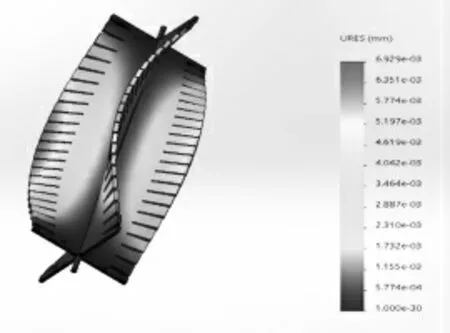
圖7 垃圾掃板位移分析圖
5 結(jié) 語(yǔ)
本文中的清理船使用轉(zhuǎn)輪作為驅(qū)動(dòng)裝置,使用雙直流電動(dòng)機(jī)為轉(zhuǎn)輪提供動(dòng)力。直流電動(dòng)機(jī)帶動(dòng)軸系轉(zhuǎn)動(dòng),以驅(qū)動(dòng)轉(zhuǎn)輪運(yùn)動(dòng),通過(guò)控制電動(dòng)機(jī)的正反轉(zhuǎn)實(shí)現(xiàn)清理船的轉(zhuǎn)向。垃圾掃板及耙釘型傳送帶同樣采用直流電動(dòng)機(jī)驅(qū)動(dòng)。垃圾定位系統(tǒng)選用超聲波傳感器及紅外光電傳感器,通過(guò)多傳感器信息融合技術(shù)對(duì)垃圾進(jìn)行精確定位。GPS系統(tǒng)可提前對(duì)海岸進(jìn)行路徑規(guī)劃,以實(shí)現(xiàn)裝置在限定區(qū)域內(nèi)的巡航。質(zhì)量傳感器安裝于垃圾儲(chǔ)存框下,當(dāng)收集到的垃圾達(dá)到設(shè)定值時(shí),信號(hào)輸入控制中心,由單片機(jī)發(fā)出指令,控制清理船返航。同時(shí),為防止清理船失控現(xiàn)象的出現(xiàn),設(shè)計(jì)中增加遙控模式,采用物聯(lián)網(wǎng)WIFI模塊,以實(shí)現(xiàn)遠(yuǎn)距離控制。
淤泥質(zhì)海岸清理船主要用于淤泥質(zhì)海岸的垃圾清理,也可執(zhí)行內(nèi)陸河道、湖泊水域的水面垃圾打撈收集工作,具有較強(qiáng)的可移植性。本文主要完善了淤泥質(zhì)海岸垃圾清理船設(shè)計(jì),提出了基于單片機(jī)的淤泥質(zhì)海岸垃圾清理船控制系統(tǒng)設(shè)計(jì)。清理船設(shè)計(jì)的實(shí)現(xiàn)可有效解決海岸垃圾的污染問(wèn)題,能有效促進(jìn)相關(guān)海岸旅游產(chǎn)業(yè)和水產(chǎn)養(yǎng)殖業(yè)的發(fā)展。另外,海岸垃圾污染的治理也間接保護(hù)了海洋生物的生存環(huán)境。本文所完善的清理船設(shè)計(jì)的實(shí)施,可改善人工打撈的勞動(dòng)強(qiáng)度,避免不明垃圾對(duì)打撈人員造成的傷害,保護(hù)打撈人員安全。
猜你喜歡
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年12期)2018-08-01 00:48:04
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
電子制作(2017年19期)2017-02-02 07:08:27
