地下無軌采礦裝備智能避障技術和方法研究
2020-09-10 07:22:44戰凱余樂文張達張元生
黃金 2020年9期
戰凱 余樂文 張達 張元生



摘要:在分析現有無軌采礦裝備避障技術基礎上,開發了三維避障探測系統,提出了一種基于三維環境探測的地下礦山無軌采礦裝備智能避障預警方法。介紹了該技術的背景,建立巷道探測模型,包括橫向距離和縱向距離判斷方法。將該方法應用于鏟運機,證明了該方法在無人鏟運機上的有效性和廣闊的應用前景。
關鍵詞:地下開采;智能避障;無軌采礦裝備;三維避障探測系統;分級預警;雷達
中圖分類號:TD679 文章編號:1001-1277(2020)09-0077-04
文獻標志碼:Adoi:10.11792/hj20200912
引 言
隨著礦業領域向智能化、無人化方向的發展進程不斷加快,發展智能采礦技術與裝備成為礦山行業的必經之路。采礦裝備的智能化是智能采礦的前提,“十二五”期間,由北京礦冶研究總院牽頭組織實施的國家高技術研究發展計劃(863計劃)主題項目“地下金屬礦智能開采技術”,開發了智能鏟運機、智能裝藥車、智能礦用汽車、智能鑿巖臺車、智能潛孔鉆機等智能采礦裝備,攻克了采礦裝備的自主定位與導航、路徑規劃與避障、自主行駛等核心技術,大幅推進了國內智能采礦裝備的發展[1-2]。
智能避障是實現無軌采礦裝備無人駕駛的關鍵技術,是提升地下無軌采礦裝備安全高效作業水平的核心,大力開發智能避障技術具有迫切需求和重要意義。國外無軌裝備避障技術研究起步較早,山特維克公司開發的AutoMine系統、Optimine礦山信息化管理系統已成為數字化開采的典范。國內起步較晚,露天礦山設備避障技術研究者較多。韋海良等[3]在分析各種防碰撞技術基礎上,研制了基于24G多普勒效應的毫米波雷達防撞系統,闡述了相關技術原理、系統組成與功能,開展了不同天氣、不同道路和車輛不同方向等條件下試驗。李鑫等[4]在分析防碰撞系統需求的基礎上提出需要采集的物理量,設計了基于衛星定位和角運動測算的露天礦卡車防碰撞系統,但該系統無法判別高度信息,容易引起相鄰梯度行駛卡車報警信號的誤報,定位精度只能到米級。史海平[5]通過對露天礦安全生產現狀分析,設計了基于GPS技術的卡車防碰撞預警系統,為卡車防碰撞提供及時、全方位的預警,但GPS系統容易受衛星狀態的影響。楊志勇[6]開展防碰撞預警技術在GPS卡車調度系統中的應用研究,實現資源的整合與共享。武先利等[7]基于雙頻RF近距離自組網穩定通信、復雜環境視頻采集顯示、GPRS數據通信等關鍵技術,研制出了高度集成的露天礦車輛防碰撞與調度系統,實現多位一體的車輛間防碰撞預警。盧云峰[8]研制了露天礦卡車安防預警預控集成終端,實現了卡車安防預警、人員安防預警、毫米波雷達防碰撞自動剎車等六合一功能,使露天礦卡車安防預警預控管理上升到一個新的臺階。然而地下礦山無法接收GPS信號,露天礦用卡車防碰撞技術無法在地下礦山應用,礦冶科技集團有限公司、北京科技大學開發了基于UWB-Laser無軌裝備定位導航系統[9-12],通過二維激光雷達預警系統,判斷設備與巷道距離進行預警,實現了無軌裝備避障,但預警閾值設置過大,行駛過程中經常報警,行駛效率低;如果預警閾值設置過小,遇到緊急情況無法提前預警,安全性差。因此,本文提出一種基于三維環境探測的地下礦山無軌采礦裝備智能避障預警方法,提高采礦裝備避障檢測準確性,大幅降低地下無軌裝備作業的事故風險。
1 三維避障探測系統
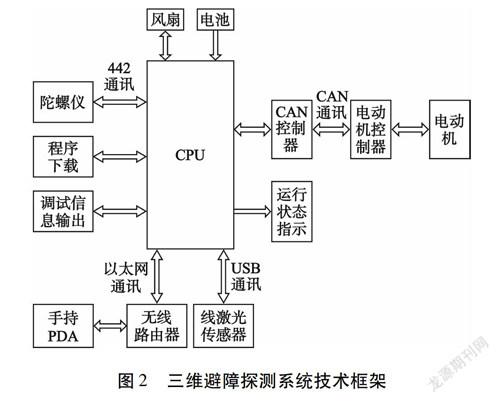
三維避障探測系統的硬件主要包括核心板、陀螺儀、激光測距傳感器、電動機、減速機構、編碼器和電動機控制器、無線路由器、電池等部分(見圖1)。
通過電動機帶動二維激光測距傳感器旋轉,實現巷道輪廓三維感知,CPU通過USB接口采集線激光的數據,同時控制電動機的運行;陀螺儀獲取的方位信息與線激光采集的點數據實時匹配,再通過以太網接口,由無線路由器發送給手持PDA進行解算,技術框架見圖2。
2 智能避障技術研究
2.1 巷道探測模型建立
首先將巷道環境按視角劃分為6個區域(上下前后左右),每個區域擁有90°的視角,保證空間無縫不重疊覆蓋(見圖3),在每個視角范圍內統計占據概率地圖的分布。根據分布計算可朝該方向前進的權值,選取權值最大的方位執行前進;當權值都小于一定值時判定為無可移動方向,禁止該向移動。具體權值計算考慮如下因素:
1)避障指數Z,視角中一定范圍內(如1.5 m)有障礙物點,判為存在障礙物,禁止該向移動。
2)運行慣性I,包括由無軌裝備本身動力學特征和駕駛者造成的固定距離,也要包括由于速度不同造成的可變距離。
3)空間深度D,優先向空間更寬曠的方向移動。視角內綜合深度越大,該向移動權值越大,反之越小。
綜合考慮以上3個因素,通過具體場景測試確定各項因素值的權重。
2.2 巷道避障技術
為了實現無軌采礦裝備避障,需要在無軌裝備上安裝三維避障探測系統,利用激光雷達采集巷道的三維信息,從而構建地下巷道三維感知形態,通過巷道探測模型評估無軌裝備與障礙物或巷道壁的距離,實現避障預警。
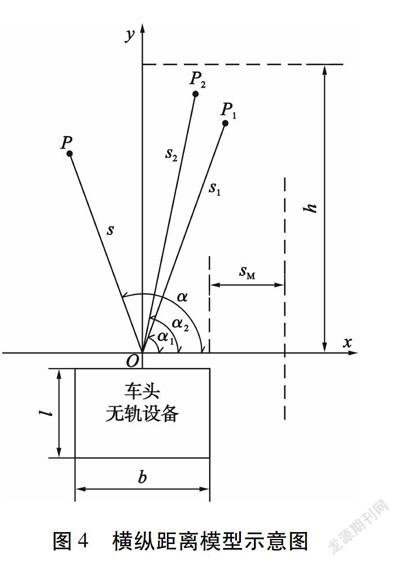
巷道三維檢測信息是無軌裝備安全行駛的重要判斷依據,為了準確評估無軌裝備安全行駛趨勢,將巷道三維空間模型簡化投影到平面上,通過二維平面距離開展預警評估。將激光雷達掃描得到的直線距離轉化為檢測點的二維坐標信息。在平面坐標系中,為了得到檢測點的二維坐標信息,需要將直線距離值轉換為測量點與激光雷達之間的橫向距離和縱向距離。
橫縱距離模型見圖4。已知無軌裝備寬b,長l,掃描點P與激光雷達之間的距離s和橫向安全距離sM,掃描點P與x軸之間夾角α;掃描點P1與激光雷達之間的距離s1,與x軸夾角α1;掃描點P2與激光雷達之間的距離s2,與x軸夾角α2;h為有效探測距離。
1)避障指數Z評估。將激光雷達檢測到的數據信息(障礙點信息)轉換成坐標點,障礙點Pi的坐標信息為(xi,yi)。
2)運行慣性I評估。為了保證無軌裝備在巷道環境中運行的安全性,運行慣性I要包括由無軌裝備本身動力學特征和駕駛者造成的固定距離,也要包括由于速度不同造成的可變距離,計算公式為:
I可以根據復雜度不同的巷道環境做相應調整。
3)空間深度D評估。通過建立橫向距離和縱向距離判斷模型,識別不同的視角、車寬等條件下綜合深度權值D。根據測量點與激光雷達之間的橫向距離和縱向距離信息,建立無軌裝備的橫縱距離模型。距離判斷模型提供的不同的判斷條件,會直接影響無軌裝備避障系統的輸出結果,進而影響下一步行駛動作的判斷。sM為橫向安全距離,其限定無軌裝備與巷道墻壁的最小間距,激光雷達與巷道墻壁之間的最小安全距離為b/2+sM;通過對掃描點橫向距離與最小安全距離的比較,并輔助縱向距離比較,將危險狀態分為3個等級:綠色安全等級、黃色提醒等級和紅色警示等級。
(1)綠色安全等級。滿足式|scos α|≥b/2+sM,則表示有效探測區域內所有掃描點均在無軌裝備前方的直線行駛敏感區域以外,由此可判斷在當前的巷道環境中,車輛可保持前車架方向不變,快速直線行駛。
(2)黃色提醒等級。滿足式|scos α|<b/2+sM,則表示無軌裝備正前方的直線行駛敏感區域內存在掃描點,表明巷道出現了方向改變或有障礙物存在,這種情況是最復雜且難以判斷的。為了更準確地判斷當前車輛所處的巷道環境信息,通過上式篩選出落在無軌裝備直線行駛敏感區域內的掃描點;如果這些掃描點滿足輔助判斷條件①:α1-α2≤5°,則判定無軌裝備前方出現的巷道出現了方向改變,要將危險狀態等級提升至黃色提醒等級,提醒駕駛者注意前方巷道情況。如果不滿足輔助判斷條件①,則利用輔助判斷條件②:‖s1sin α1-s2sin α2‖≥l/2,判斷這些掃描點之間的縱向距離,如果滿足輔助判斷條件②,則說明車輛前方的巷道環境出現了曲線型方向改變或是巷道兩側出現障礙物,并且它們之間的縱向距離可以允許車輛改變角度通過此處,要將危險狀態等級提升至黃色提醒等級,提醒駕駛者注意前方巷道情況。
(3)紅色警示等級。如果無軌裝備前方的直線行駛敏感區域內的掃描點不能通過黃色提醒等級中的判斷條件做出明確判斷,則要將危險狀態等級提升至紅色警示等級。紅色警示等級中的主要判斷公式和黃色提醒等級中的相同,即scos α<b/2+sM,目的是篩選出落在無軌裝備直線行駛敏感區域內的掃描點,再通過3個輔助判斷條件繼續判斷;如果掃描點滿足輔助判斷條件①:α1-α2>5°,則表明掃描點在無軌裝備前方的直線行駛敏感區域內分布不連續;如果掃描點滿足輔助判斷條件②:‖s1sin α1-s2sin α2‖<l/2和輔助判斷條件③:‖s1cos α1-s2cos α2‖<b+2sM,則表示這些掃描點之間的縱向距離和橫向距離都無法滿足無軌裝備安全的通過,從而將危險狀態等級提升至紅色警示等級。
3 現場工業試驗
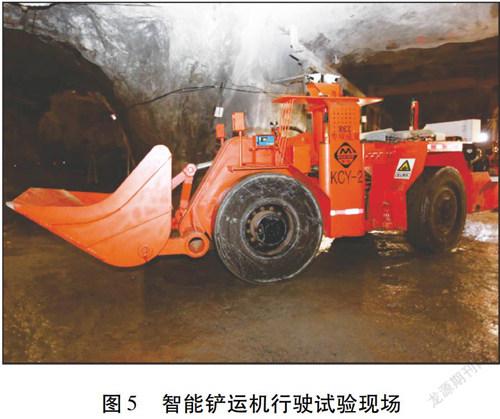
無軌裝備智能避障技術方法應用于地下巷道的智能鏟運機自主行駛,試驗場地為深圳市中金嶺南有色金屬股份有限公司凡口鉛鋅礦-240 m中段的主斜坡道,試驗場地見圖5。
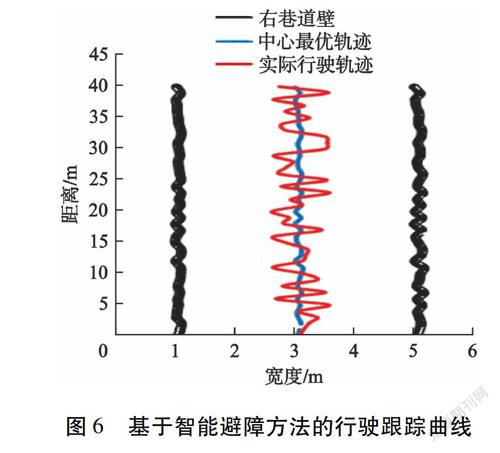
在地下巷道的自主行駛試驗中,鏟運機采用三級預警智能避障技術與方法,最終行駛以直線加曲線為主,試驗跟蹤效果見圖6。試驗結果表明,本文提出的智能避障技術可為無軌裝備安全行駛提供準確數據支撐。
4 結 語
本文提出了一種無軌采礦裝備智能避障技術方法,通過對無軌裝備進行多區段分級預警,有效約束裝備行駛路徑,避免無軌裝備在行駛過程中互相碰撞及撞人事故,并得到了試驗驗證。基于三維環境探測的地下礦山無軌采礦裝備智能避障預警方法可有效降低無軌裝備作業的事故風險,提升無軌裝備的智能化程度,有效降低碰撞事故發生的概率,提升礦山安全生產水平,具有推廣應用價值。
[參 考 文 獻]
[1] 馬飛,楊皞屾,顧青,等.基于改進A*算法的地下無人鏟運機導航路徑規劃[J].農業機械學報,2015,46(7):303-309.
[2] 張元生,戰凱,馬朝陽,等.智能礦山技術架構與建設思路[J].有色金屬(礦山部分),2020,72(3):1-6.
[3] 韋海良,郭安斌,董文斌,等.礦用卡車毫米波雷達防碰撞系統的研究與應用[J].煤礦安全,2015,46(增刊1):43-47.
[4] 李鑫,尚濤,周偉,等.基于衛星定位和角運動測算的露天礦卡車防碰撞系統設計[J].煤礦機械,2015,36(1):1-2.
[5] 史海平.基于GPS的卡車防碰撞預警系統在露天礦的應用[J].露天采礦技術,2016,31(7):75-78.
[6] 楊志勇.防碰撞預警技術在GPS卡車調度系統中的應用[J].煤炭科學技術,2018,46(增刊1):161-163.
[7] 武先利,溫良,鮮希,等.露天礦車輛防碰撞調度系統研究[J].煤炭科學技術,2015,43(5):87-90,117.
[8] 盧云峰.露天礦卡車安防預警預控集成終端的研制[J].中國礦業,2017,26(增刊1):407-410,414.
[9] 石峰,顧洪樞,戰凱,等.地下鏟運機自主行駛與避障控制方法研究[J].有色金屬(礦山部分),2015,67(5):68-75.
[10] 李建國,戰凱,石峰,等.基于最優軌跡跟蹤的地下鏟運機無人駕駛技術[J].農業機械學報,2015,46(12):323-328.
[11] 孟宇,肖小鳳,趙坤.基于UWB 的地下定位算法和拓撲優化[J].工程科學學報,2018,40(6):743-753.
[12] 陸博,周俊武,趙建軍.基于UWB系統的井下車輛高精度定位研究[J].有色金屬(礦山部分),2015,67(6):57-60.
Research on intelligent obstacle avoidance technology
and method for underground trackless mining equipment
Zhan Kai1,2,3,Yu Lewen1,2,3,Zhang Da1,3,Zhang Yuansheng1,3
(1.BGRIMM Technology Group; 2.School of Mechanical Engineering,University of Science and Technology Beijing;
3.Beijing Key Laboratory of Nonferrous Intelligent Mining Technology)
Abstract:The three-dimensional obstacle avoidance and detection system is developed based on the analysis of the existing obstacle avoidance technology for trackless equipment.An intelligent obstacle avoidance and early warning method for trackless mining equipment in underground mine based on three-dimensional environment detection is proposed.The background of the technology is introduced and the roadway detection model is established,including the methods for transverse distance and longitudinal distance judgment.The method is applied to a LHD and the results show that the method has effectiveness and wide application prospects for unmanned LHD.
Keywords:underground mining;intelligent obstacle avoidance;trackless equipment;three-dimensional obstacle avoidance and detection system;graded early warning;radar
收稿日期:2020-08-10; 修回日期:2020-08-20
基金項目:“十三五”國家重點研發計劃項目(2018YFC0604400)
作者簡介:戰 凱(1962—),男,吉林長春人,研究員,博士,從事金屬礦山智能裝備、智能礦山研究工作;主持的重大項目有國家863計劃“十一五”“十二五”主題項目“地下金屬礦智能開采技術”和“十三五”國家重點研發計劃“地下金屬礦規模化無人采礦關鍵技術研發與示范”;獲得的重大獎項有省部級科技獎10余項,專利24項等;北京市南四環西路總部基地18區23號樓,礦冶科技集團有限公司,100160;E-mail:zhankai@bgrimm.com
猜你喜歡
現代礦業(2021年12期)2022-01-17 07:30:32
河北地質(2021年2期)2021-08-21 02:43:50
神劍(2021年3期)2021-08-14 02:30:08
昆鋼科技(2021年2期)2021-07-22 07:47:06
礦產勘查(2020年7期)2020-12-25 02:43:42
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32