接觸式輪廓儀的自動標注數學模型
2020-09-10 07:22:44崔煜
江蘇廣播電視報·新教育 2020年42期
崔煜





摘要:為2020年全國大學生數學建模競賽D題提供可行解法,針對探針沾污、探針缺陷、掃描位置不準導致的輪廓儀數據不準問題,利用matlab對數據進行分段處理,進而確定水平線軸線,擬合曲線段,斜線段,確定交點坐標、利用基本的數學知識建立模型求解出工件直線段各個參數,用最小二乘法擬合和圓弧。針對有傾斜角的工件測量數據,利用旋轉變換法將有傾斜角度的工件測量數據水平校正。
關鍵詞:數據擬合;標注;最小二乘法;旋轉變換
1.問題的提出
輪廓儀是一種兩坐標測量儀器,它由工作平臺、夾具、被測工件、探針、傳感器和伺服驅動等部件組成。其工作原理是,探針接觸到被測工件表面并勻速滑行,傳感器感受到被測表面的幾何變化,在X和Z方向分別采樣,并轉換成電信號。該電信號經放大等處理,轉換成數字信號儲存在數據文件中。
輪廓曲線理想狀況下是光滑的,但由于接觸式輪廓儀存在探針沾污、探針缺陷、掃描位置不準等問題,呈現出粗糙不平的情況,這給工件形狀的準確標注帶來影響。
因此簡化問題,假設被測工件的輪廓線是由直線和圓弧構成的平面曲線(見圖4)。請建立數學模型,根據附件1(工件1的水平和傾斜測量數據)、附件2~附件4(工件2的多次測量數據)所提供的輪廓儀測量數據,研究下列問題:
問題1是根據附件1中的工件1在水平狀態下的測量數據即表level,其輪廓線如圖4所示,請標注出輪廓線的各項參數值:槽口寬度、圓弧半徑、圓心之間的距離、圓弧的長度、水平線段的長度、斜線線段的長度、斜線與水平線之間的夾角和人字形線的高度。
問題2是在同一工件在不同次測量時,由于工件放置的角度和位置不同,輪廓線參數的計算值也會存在差異。附件1中的表down給出了工件1在傾斜一個角度和有一些水平位移狀態下輪廓線的測量數據。請計算該工件測量時的傾斜角度,并作水平校正。在數據校正后,完成問題1的任務,并比較兩種測量狀態下工件1各項參數計算值之間的差異。
2.數據處理
通過初步分析,發現附件1中原始較為完整,不存在缺失和重復,數據精度比較高,到小數點后九位。而matlab中精度是小數點后四位,所以采用excel進行計算,采用matlab進行畫圖。
將工件1中level表格的數據導入matlab,利用畫圖函數可得如下圖1,為了更清楚明確的計算各個參數,分別在圖中標注了各個分段點,同時也將數據按點分段。
通過圖1可以看到水平線段有8段,圓弧有7段,人字高數據一段。
3.問題一模型的建立與求解
3.1模型的建立
由于工件1輪廓線中水平線在放大后粗糙凹凸不平,不能夠直接從圖形中選取分段點。假設工件水平面光滑,統計數據分析,擬合各個水平線段的直線方程。再與各個曲線擬合的方程聯立求解得出交點。
1、對于水平線,求8段數據的平均數
其中為第段水平數據段的平均值。
2、對于斜線建立直線模型
其中對于參數的設定用數據擬合方法。
3、由于水平線上拐角處凹凸不平,很難確定端點坐標,同時為了較為準確合理的求出工件的水平長度、夾角,利用曲線擬合數據來計算端點,對于每一條弧線假設滿足方程:
4、類似中學數學中求點的坐標的方法,分別聯立水平線和2條斜線方程
解方程可得的坐標。
5、類似中學數學中求點的坐標的方法,分別聯立水平線和曲線方程
解方程可得的橫坐標。
6、因此可以計算得出槽口寬度
7、為了方便求出夾角,三個鉛筆輪廓與水平線相交的上部分近似的看成直線段,擬合出直線段的直線方程
8、鉛筆輪廓上半段直線、斜線與水平線之間的夾角的正切為,則斜線與水平線之間的夾角為
9、斜線的方程(2)已給出,假設斜線段是直線斜線,其長度為
10、對于工件中圓弧部分要求出圓心和半徑,建立圓的方程
下面我們采用最小二乘法來進行擬合[5],因此設最小二乘圓的一般方程為
擬合誤差的平方和為由最小二乘法原理求得的參數使得最小,必須讓、和通過對系數求偏導并令其導數為零,可得
通過求解上述矩陣方程可得一般圓的方程系數,通過圓的方程變換可得擬合圓的半徑和圓心坐標如下:
11、圓心之間的距離
12、對于圓弧長的求解,我們利用圓弧長公式
其中是圓的半徑,為圓弧對應的圓心角,當圓弧與水平面相交時(大小圓弧),交點為。
對于的求解利用余弦定理得出
當圓弧不與水平面相交時(鉛筆輪廓),聯立圓的方程與直線方程得
(17)
解方程組可得圓弧左邊交點,圓弧右邊交點
由弧與左右直線相交交點與圓心構成等腰三角形,兩腰夾的角利用余弦定理可求得,公式如下:
3.2模型的求解
3.2.1槽口寬度求解
如圖1所示,槽口寬度即兩個橫坐標之間的差值,只要把橫坐標求出來即可。要通過求交點求出橫坐標,則先把曲線的方程擬合出來,通過matlab工具箱cftool把工件1中10段曲線數據段和兩段直線數據段擬合出來,其中前三個凸出來的鉛筆頭輪廓,分成兩端進行擬合,是為了提高擬合精度,結果如下表:
通過(4),(5)和(6)三個方程組通過解得的橫坐標如下表
其中和為數據的起始點。
利用水平端點的坐標數據,橫坐標做差得到槽口寬度如表3
3.2.2人字形高度及斜線長度求解
兩條斜線之間的交點可以通過聯立兩直線方程
可得兩直線的交點Z坐標(),人字形高可以通過減去水平線高。
由excel軟件求解得人字形高位0.9868。
對于斜線段得長度得求解,下端點分別為上端點坐標為()因此斜線段長度為:
3.2.3斜線與水平線之間的夾角求解
為了簡化計算,將三個鉛筆輪廓與水平線相交的上部分近似的看成直線段,數據上選取部分數據作直線擬合,而對于斜線段直接選取數據擬合,求出得8條直線方程、斜率和斜傾斜角如下表:
3.2.4圓心、圓的半徑及弧長的求解
首先由最小二乘法擬合出圓的方程如下表
因此可以求出圓心距如下表
利用matlab求解曲率為零的點,然后利用定積分求解每一段弧如下表
4.問題二模型的建立與求解
4.1模型的建立
附件1中的表down給出了工件1在傾斜一個角度和有一些水平位移狀態下輪廓線的測量數據,計算該工件測量時的傾斜角度,并作水平校正。
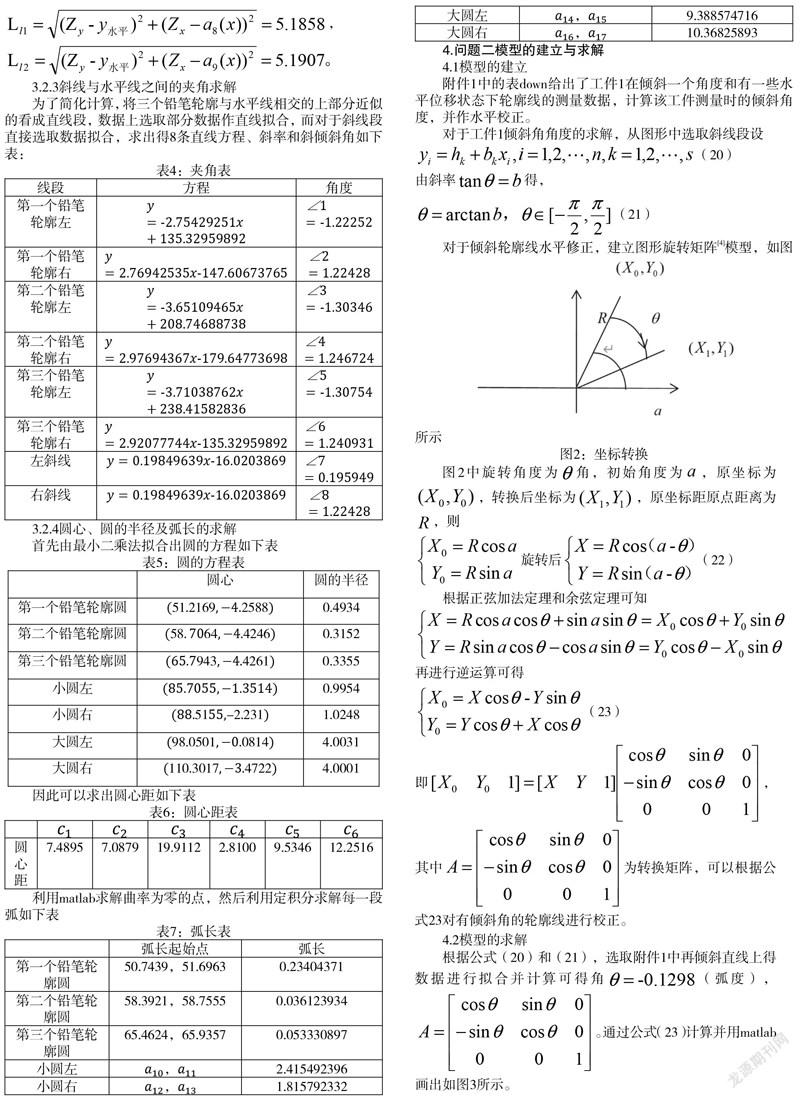
對于工件1傾斜角角度的求解,從圖形中選取斜線段設
對于傾斜輪廓線水平修正,建立圖形旋轉矩陣[4]模型,如圖所示
圖2中旋轉角度為角,初始角度為,原坐標為,轉換后坐標為,原坐標距原點距離為,則
根據正弦加法定理和余弦定理可知
再進行逆運算可得
即,其中為轉換矩陣,可以根據公式23對有傾斜角的輪廓線進行校正。
4.2模型的求解
根據公式(20)和(21),選取附件1中再傾斜直線上得數據進行擬合并計算可得角(弧度),。通過公式(23)計算并用matlab畫出如圖3所示。
在數據校正后,采用與問題一同樣的計算方法,對上圖中的輪廓線相關參數進行求解。求得的結果與圖一中相關數據進行對比。
4.2.1槽口寬度
先對斜線,圓弧進行數據擬合,然后通過直線的方程和圓的方程計算出端點的橫坐標。
利用水平端點的坐標數據,橫坐標做差得到槽口寬度如表3
4.2.2人字形高度及斜線長度求解
由excel軟件求解得。對于斜線段的長度得求解,下斷點分別為,上端點坐標為()因此斜線段長度為:,。
4.2.3斜線與水平線之間的夾角求解
為了簡化計算,將三個鉛筆輪廓與水平線相交的上部分近似的看成直線段,數據上選取部分數據作直線擬合,而對于斜線段直接選取數據擬合,求出得8條直線方程、斜率和斜傾斜角如下表:
4.2.4圓心、圓的半徑及弧長的求解
首先由最小二乘法擬合出圓的方程如下表
因此可以求出圓心距如下表
利用matlab求解曲率為零的點,然后利用定積分求解每一段弧如下表
5.結論
本文對探針沾污、探針缺陷、掃描位置不準等問題帶來的數據不準問題,建立數學模型對工件形狀相關參數準確標注,建立模型所運用的數學知識簡單易懂,計算方法簡單易行。對于圓弧圓的半徑和圓心的求解,利用最小二乘法擬合,較為理想的確定圓的半徑和圓心,提高數據的準確性,實現輪廓線自動標定。對于有傾斜一個角度的工件數據,采用旋轉變換實現數據調整為正常狀態。
參考文獻:
[1]趙琦,解琳琳,侯妙樂,劉浩宇.基于點云數據的雀替輪廓線參數信息自動化提取方法[J].地理信息世界,2018年,第25卷第5期
[2]韓志國,李鎖印,馮亞南,趙琳.接觸式輪廓儀探針狀態檢查圖形樣塊的研制[J],微電子技術,2019年第9期
[3]陳十進,劉瑾,楊海馬,劉海珊,韋鈺,肖俊,解光耀.非接觸式鋼軌三維輪廓參數檢測系統研究[J].儀表技術與傳感器,2019年第5期
[4]閆志剛,圖形學中繞任意軸旋轉矩陣的推廣[J].計算機時代,2009年第12期
[5]楊旭東,大量程輪廓綜合測量系統研究[J].華中科技大學博士論文.2007年5月
[6]司守奎,孫兆,數學建模算法與應用[M].國防工業出版社.2015年4月(第二版)
[7]姜啟源,數學模型[M],高等教育出版社,2008年3月(第三版)
(浙江交通職業技術學院 人文學院?杭州?311112)
