基于行星輪機構運送緩沖器的移動裝置的運動學分析
2020-09-10 00:23:54李琳
內燃機與配件 2020年15期
李琳

摘要:結合動車組調試車間運輸緩沖器裝置耗費人力、耗時長的問題,設計一種運送緩沖器的移動裝置,其主要有移動平臺和升降平臺兩部分組成。首先,設計升降平臺和移動平臺,并確定各個參數,并在Solidworks中建立移動裝置的三維模型。其次,在虛擬仿真軟件Adams中,對移動平臺進行仿真分析,包括直線行走、圓周運動、垂直越障三種不同工況,其中圓周運動采用的是差速轉彎的方法。最后,仿真結果得出,移動平臺的直線運動、圓周運動和垂直越障滿足設計要求,滿足運輸緩沖器要求。
關鍵詞:移動平臺;升降平臺;緩沖器;Adams
0 ?引言
隨著軌道交通蓬勃發展,電力機車組充當客運車輛的主力軍,其中“復興號”扮演者重要角色,是目前世界上運營速度最快的高速電力機車組。在列車調試過程中,需要對列車解編和重新編組,其中緩沖器需要拆解和安裝,由于列車在不同車間調試,需要對緩沖器進行運輸,每次運輸需要安排多人,從地面到列車安裝拆卸緩沖器都需人工搬運,如圖1所示。為了節省更多人力,節約工作時間,設計一種運送緩沖器的移動機構。
一種運送緩沖器的移動裝置設計與研究,是將移動機構和升降平臺兩個結合,其中,移動機構完成在各車間之間運輸緩沖器,升降平臺完成將緩沖器從地面提升到列車車底位置。其中,移動機構有輪式、足式和履帶式,機械結構采用輪式的特點有速度快、運動靈活,能耗低,結構簡單,控制方便,自重輕,承載大,但是在復雜地形,位移能力差。機械結構采用履帶式的特點有適應地形能力強,越障能力強,但是摩擦阻力大,行駛機構易磨損。另外,升降平臺采用液壓式,能夠平穩提升大重量貨物,具備故障率低、安全高效、運行可靠、結構穩定、維修方便、方便等優點。
1 ?整體樣機設計
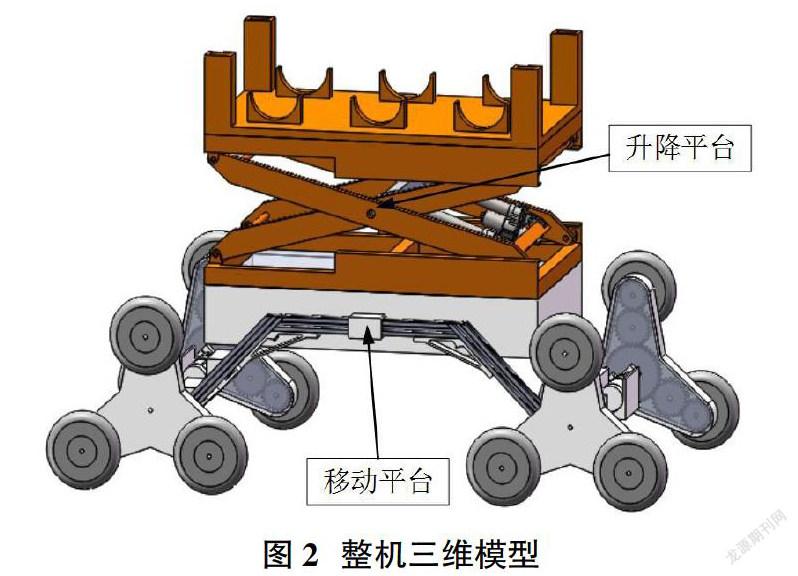
整體樣機設計根據使用現場要求,需要滿足在工廠內復雜路況行駛,由于車間地面平整,所以移動機構采用輪式機構。其中,移動機構采用的是行星輪輪胎式,每個行星輪輪式機構由一個太陽輪、三個惰輪、三個行星輪、三個輪胎構成,整個移動平臺由四個輪胎式機構組成。另外,升降平臺采用液壓驅動,有兩個液壓缸組成,每個液壓升降平臺可以放置三個緩沖器。升降平臺初始狀態,液壓缸屬于縮進狀態,隨著液壓缸伸出,升降平臺也會緩慢伸出,升降平臺終止狀態,液壓缸完全伸展。一種運輸緩沖器的移動平臺由移動平臺和升降平臺結合在一起,樣機結構示意圖如圖2所示。
本論文所提及的的升降平臺如圖2所示,由底座、兩個液壓缸、連桿機構、儲物導槽等四部分組成。其中,底座的作用是將移動平臺固定在移動平臺,通過螺栓連接方式固定;液壓缸采用雙組并聯方式,伸出長度決定升降平臺的工作高度;連桿機構各個旋轉副關節串聯在一起,軸承減少各個連桿的摩擦損耗;儲物導槽用來放置緩沖器。本文主要研究對象是移動平臺,下文主要針對其進行分析研究。
2 ?移動平臺三維模型的建立及尺寸設計
建立運輸緩沖器的移動機構三維模型,設計整體尺寸為:長930mm,寬520mm,高380mm。懸架選用的是鋁合金材質,不僅保證了結構的強度,還可以減輕車體本身的重量。輪式行星輪組由太陽輪、惰輪、行星輪、行星輪架、接地輪、傳動軸及軸承等部分組成。
設計行星輪組的具體尺寸參數,克服不同高度的臺階進行越障會出現兩種不同的工況。工況一,當障礙物較低時,電機驅動太陽輪轉動,轉矩經行星輪組傳遞給履帶輪,并帶動履帶通過與地面直接接觸產生的摩擦力平移滾過障礙物;工況二,當障礙物較高時,整個行星輪架繞太陽輪軸轉動,通過自身電機的動力和后輪的推進力被動翻越障礙物。
3 ?移動平臺運動學仿真分析及性能研究
3.1 直線行走的運動學分析
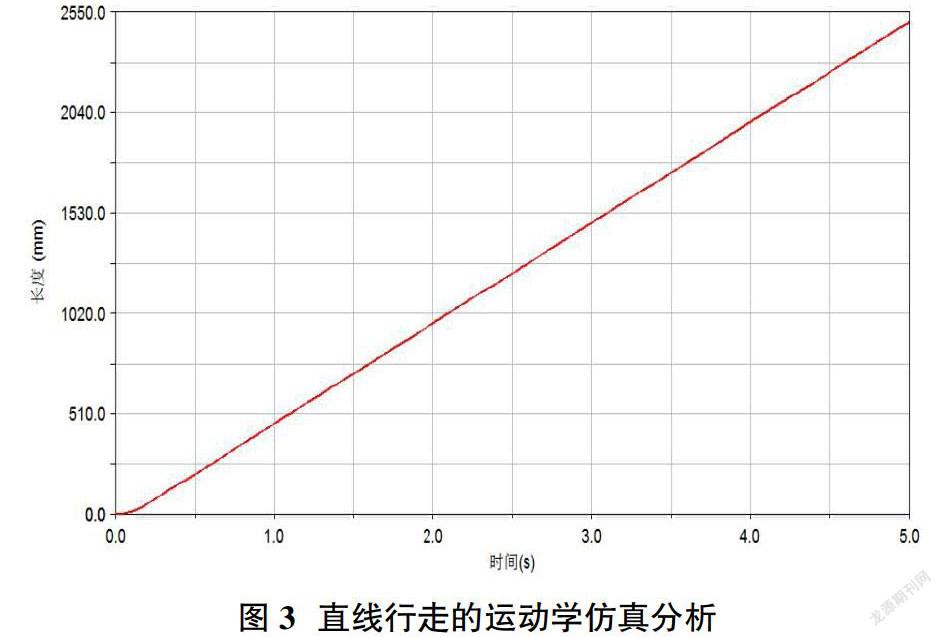
在Adams中建立仿真模型,首先分別在太陽輪與惰輪、惰輪與行星齒輪之間添加齒輪副,軸與行星架之間添加旋轉副等多個約束,然后給四個電機施加相同的驅動速度,使得太陽輪旋轉速度為298°/s,此外,履帶輪與行星輪轉速相同,由于行星輪與太陽輪的轉速比為2:1,根據行星輪組結構關系可以推導出輪胎的線速度應為0.5m/s。
對該移動平臺進行直線的運動學仿真,由圖3的仿真結果可以看出,5秒鐘內,移動平臺實際向前行走了2510mm,而理論推導結果為2500mm,精確度99.6%,在允許誤差范圍內,因此尺寸參數設計較為合理。
3.2 轉彎運動的運動學分析
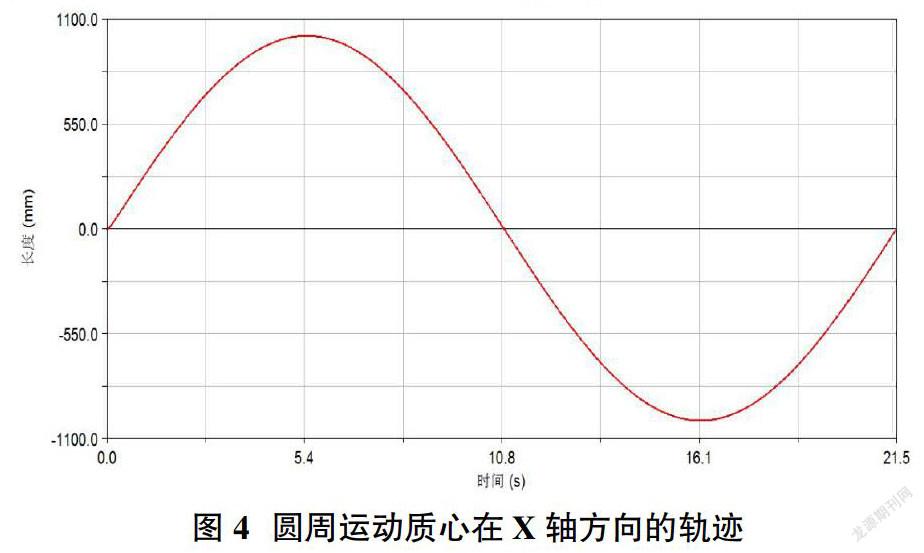
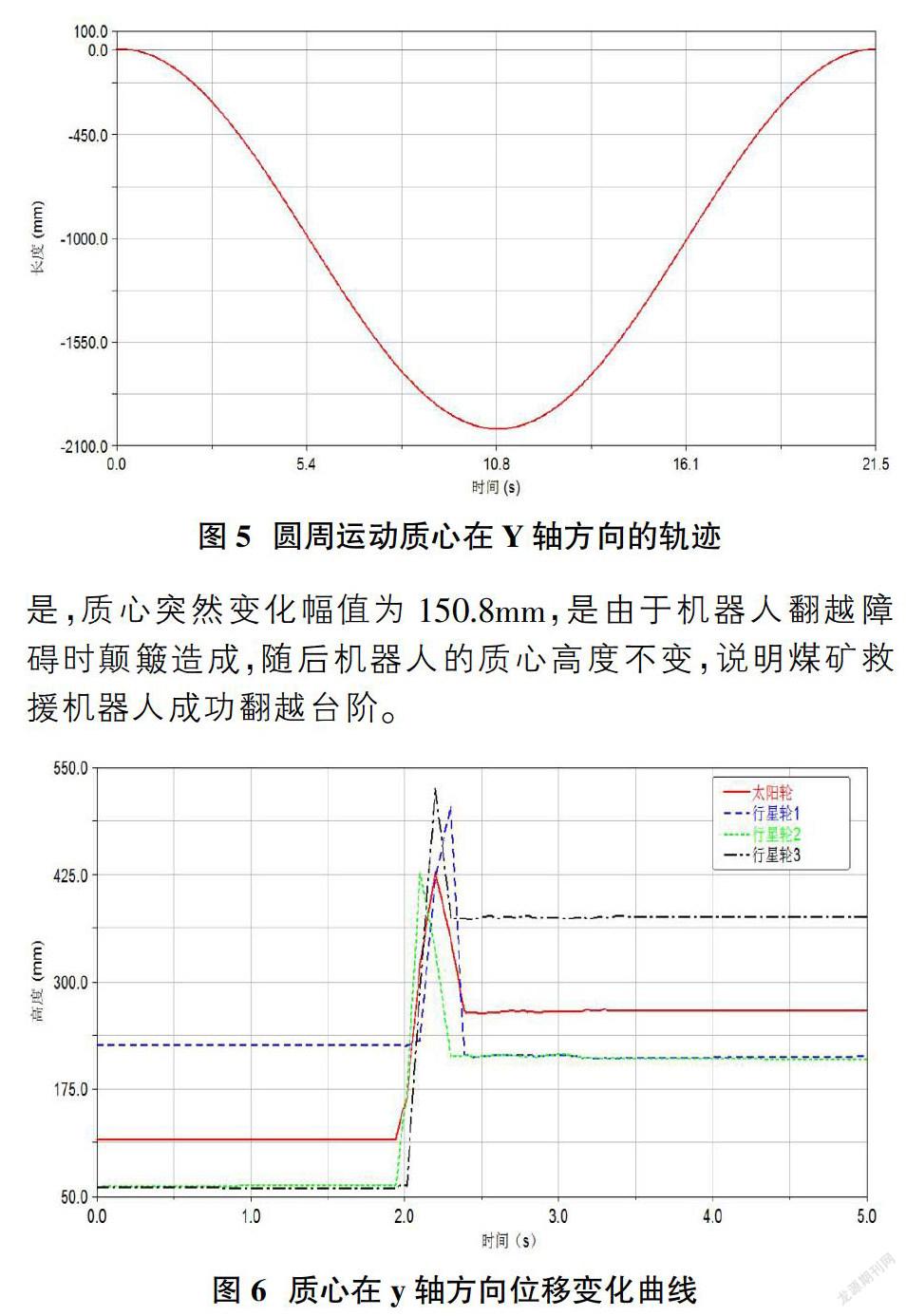
建立轉彎運動仿真模型,在Adams中設置外側兩個電機的轉速為298.0°/s,內側為178.4°/s,轉速比為1.67,車身寬度W=515mm,讓移動平臺做轉彎半徑為1000mm的圓周運動。得到質心G點在X軸和Y軸方向運動的位移仿真結果分別如圖4和圖5所示。可以看出,該過程中,質心在水平方向的位移最小值為-1002.1mm,最大值為1014.2mm,轉彎半徑為1008.15mm,與理論推導出的半徑存在誤差,誤差為1.63%;在豎直方向的位移最小值為-2007.9mm,最大值為8.9mm,誤差為1.68%。
3.3 轉彎運動的運動學分析
根據該移動機構的工作環境要求,設計其三維模型的斜邊豎直高度為300mm。在Adams中建立障礙物高度為150mm。驅動太陽輪,使車體以0.5m/s的速度勻速向前。通過圖6所示的仿真結果中可以看出,在行走到第2秒的時候,車體質心的y坐標由115.8mm變化至266.6mm,隨后穩定在265.8mm。分析數據得出,機器人剛開始翻越障礙是,質心突然變化幅值為150.8mm,是由于機器人翻越障礙時顛簸造成,隨后機器人的質心高度不變,說明煤礦救援機器人成功翻越臺階。
4 ?總結
①設計了一種運送緩沖器的移動裝置。主要由移動平臺和升降平臺兩部分組成,其中升降平臺采用的液壓式驅動機構,由并聯雙液壓缸作為動力源頭,具有高負載、適應能力強特點;移動平臺采用的基于行星輪輪式移動結構,特點是結構簡單,便于控制。
②行星輪移動平臺在垂直越障時,其越障狀態可以描述為三個階段:當0≤臺階高度≤Hmax時,行星履帶輪滾過障礙物;當Hmax≤臺階高度≤L/2時,行星履帶輪翻過障礙物;當臺階高度≥L/2時,無法完成越障。
③在Adams中建立仿真模型,并對移動平臺進行勻速直線行駛、越障、轉彎三種不同工況進行了理論推導以及仿真分析。所得仿真結果均在誤差允許范圍內,驗證移動平臺各部分參數設計的合理性。
參考文獻:
[1]張明路,李敏,田穎,呂曉玲.輪-履復合被動自適應機器人設計與參數分析[J].機械科學與技術,2019,38(02):198-204.
[2]王宇,劉泓濱,吳智恒,陳啟愉,藺志敏,童季剛.機器視覺的救災機器人越障性能分析[J].煤礦機械,2016,37(07):92-94.
[3]吳昌林,金強,趙青.行星輪式爬樓梯輪椅的越障能力分析[J].機械設計,2010(1):48-53.
[4]尚建忠,羅自榮,張新訪,等.基于構型組合的空間探測機器人移動機構設計[J].機械工程學報,2007,43(12):178-183.
[5]劉平義,王振杰,李海濤,張紹英,魏文軍.行星履帶式農用動力底盤設計與越障性能研究[J].農業機械學報,2014,45(S1):17-23.