高空間分辨率動態影響線自動測量技術研究
2020-09-10 04:37:31段敏宋剛邢春超
交通科技與管理 2020年13期
段敏 宋剛 邢春超
摘 要:本文提出了一種高空間分辨率的動態影響線自動測量技術,有效解決傳統影響線測量方式需中斷交通的問題。基于高精度動態車輛定位系統,結合健康監測系統動態模式下監測數據,自動提取與匹配撓度和應變等動態響應測量數據。實橋測試結果表明,系統可以有效完成高空間分辨率動態影響線自動測量。
關鍵詞:影響線;高空間分辨率;自動測量;健康監測系統
橋梁是交通建設中的關鍵性樞紐,是國家經濟和社會發展的重要基礎設施。隨著使用年限的推移,受外界環境、材料老化以及疲勞效應等將導致橋梁結構出現損傷積累和性能劣化。傳統評定方法在量大面廣的中小橋的快速評定具有一定局限性[1],專家評定法需要匯總不同專家意見不適用于中小橋梁,傳統荷載試驗耗時費力,需長時間中斷交通,基于健康監測的評定方法需要一定海量數據分析與處理能力,可靠度分析法中影響可靠度的因素較為復雜,各個因素間相互影響。隨著橋梁健康監測系統建設,橋梁已布設多種監測傳感器,如何快速有效的利用已有監測傳感器對橋梁承載能力進行評估具有重要的研究價值,基于影響線的橋梁承載能力快速評估技術成為研究熱點。唐等[2-3]針對基于影響線的橋梁結構評定理論的研究進展進行闡述。王等[4]通過對已知標定車輛過橋產生的橋梁動應變響應進行反演計算得到相應測點的應變影響線,實現橋梁影響線動態測試。吳[5]研究了基于實測位移影響線的橋梁結構損傷識別方法,提供了一種智能化方法和技術手段。余[6]針對基于影響線的評定方法的研究現狀和技術瓶頸,提出了一種能夠在不封閉交通的情況下獲得橋梁影響線,并根據影響線變化快速評定橋梁安全的方法。鄒[7]利用通用有限元軟件ANSYS闡述基于實測影響線的中小跨徑梁橋承載力快速評定的過程,并進行實橋測試。
傳統準靜態加載方式,需要中斷交通,測量需要反復架設儀器設備,耗費較大人力物力。本文提出了一種高空間分辨率動態影響線自動測量技術,不需要中斷交通,通過動態加載車輛的高精度定位數據,結合健康監測系統測量的結構響應數據,自動完成影響線的測量與提取。該方法可快速重復測量影響線,無需現場重復部署設備,有效降低人力成本,可大大提高影響線測量頻次,為橋梁狀態評估提供有效支撐。
1 系統架構
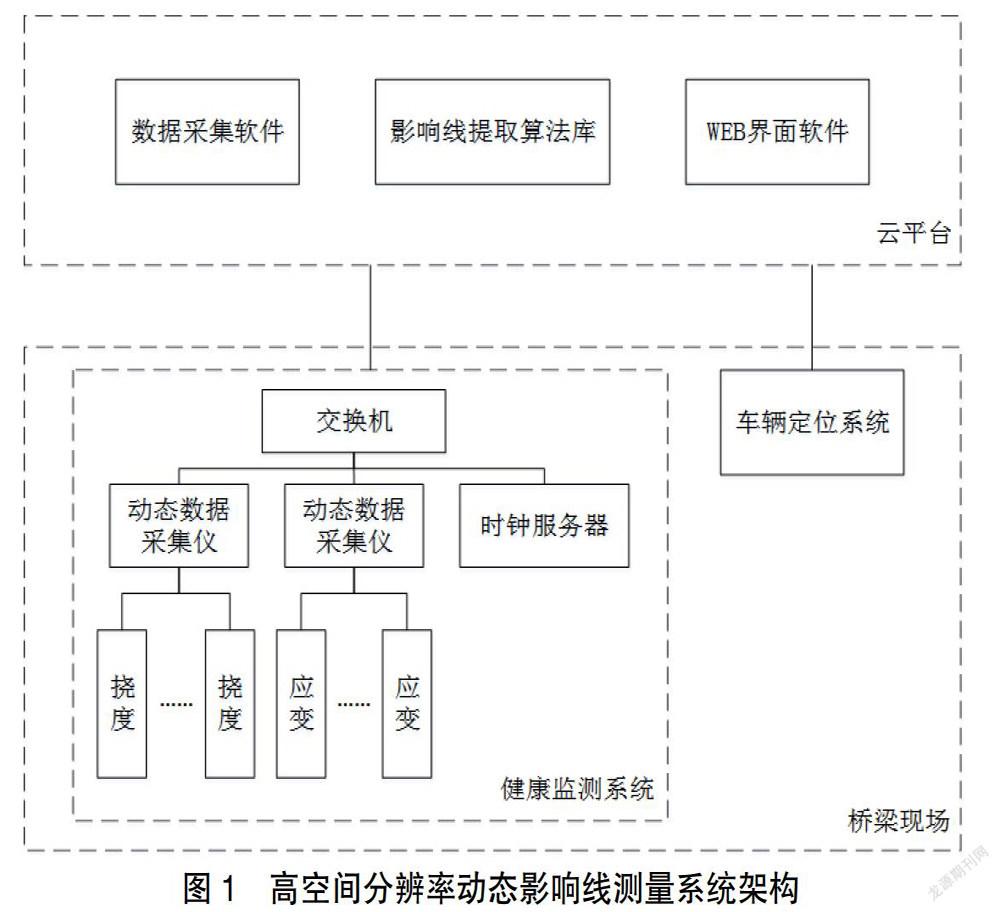
高空間分辨率動態影響線測量的關鍵在于荷載車輛定位、數據動態同步采集。系統引入云平臺技術,采用二級架構體系,分為橋梁現場層以及云平臺層。系統架構如圖1所示。
系統工作流程設計如下:
Step 1:標準車輛加載并進行稱重,重量記為;
Step 2:標準車在前軸正上方部署車輛定位系統,標定伸縮縫位置;
Step 3:平臺錄入車輛重量信息與伸縮縫位置;
Step 4:標準車進行跑車試驗,平臺自動控制系統工作模式,并將采集數據自動上傳至云平臺;
Step 5:影響線自動分析計算與提取。
2 車輛定位系統
車輛動態定位精度是影響線準確提取的關鍵因素之一。國內外針對車輛定位方法已有廣泛研究,例如RFID技術[8]、接收信號強度[9]、GNSS[10]、UWB[11]等。考慮中小橋梁管養費用有限和重復利用等因素,基于GNSS的車輛定位系統相較于RFID和UWB的方法更適合點線、點面等中小橋群的快速測量。
本文基于北斗GNSS系統設計高空間分辨率的車輛定位系統,系統基于高精度MEMS組合導航,采用多傳感器數據融合技術將衛星定位與慣性測量相結合,大大提高了系統的可靠性、精確性和動態性,滿足城市峽谷等復雜環境下長時間、高精度、高可靠性導航應用需求。車輛定位系統的安裝于車輛頂部前軸正上方,基于測量橋梁伸縮縫的絕對位置信息,通過車輛位置信息相對橋梁伸縮縫的位置信息即可完成車輛在橋梁上實時動態通行位置的測量。
3 數據動態同步采集
數據動態同步采集是保證影響線自動測量的前提,車輛定位信息與撓度及應變等監測數據同步是關鍵。橋梁結構響應頻率較低,其數據同步采集精度要求較低,本文提出基于NTP的授時方法,車輛定位系統與監測系統均通過GNSS獲取精確時間,從而保證數據通過相近時間戳可實現系統的數據動態同步采集以及數據的自動匹配。
健康監測系統根據系統功能劃分設計多模式工作機制。系統錄入伸縮縫位置標定后動態監測車輛位置信息,當車輛進入監測區域范圍內,系統通過云平臺自動切換健康監測系統工作模式。準靜態工作模式適用于低頻次采集狀態的長期監測。動態采集模式適用于影響線測量,車輛進入預設區域后啟動動態模式,車輛位置信息與監測數據均標注精準時間戳。
4 實橋測試
為進一步驗證系統的可行性,選擇實橋進行測試。選取內環快速路上6×20 m的預應力混凝土空心板橋進行測試。
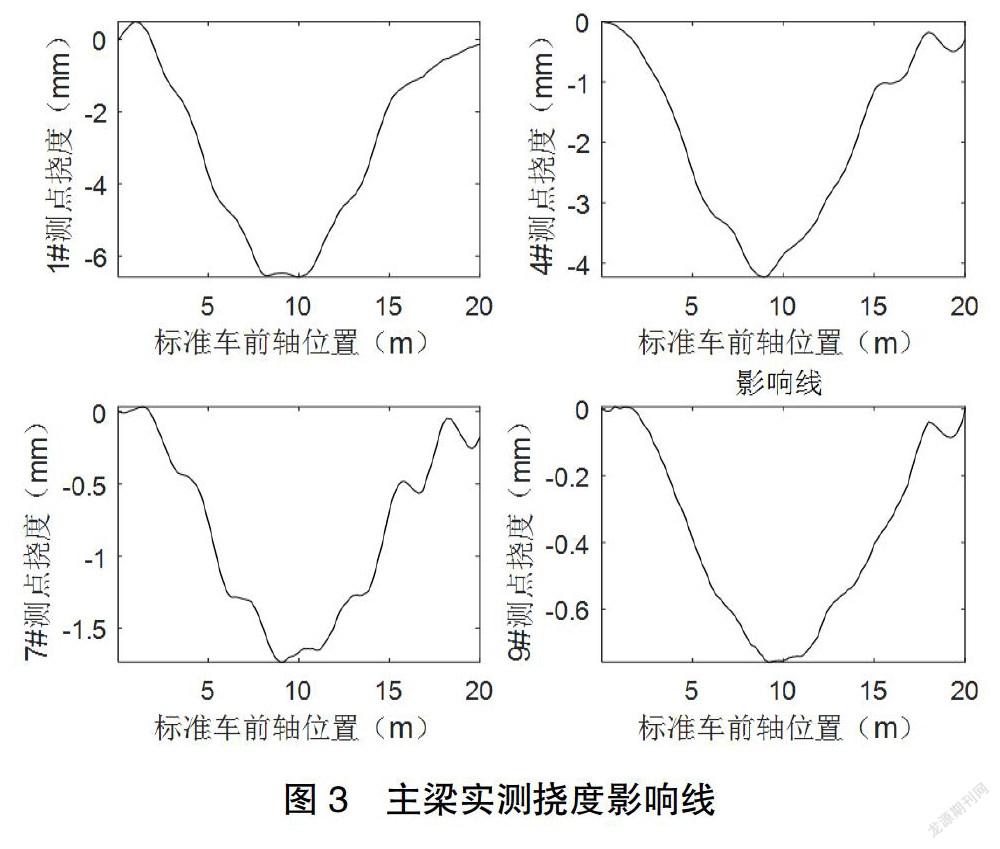
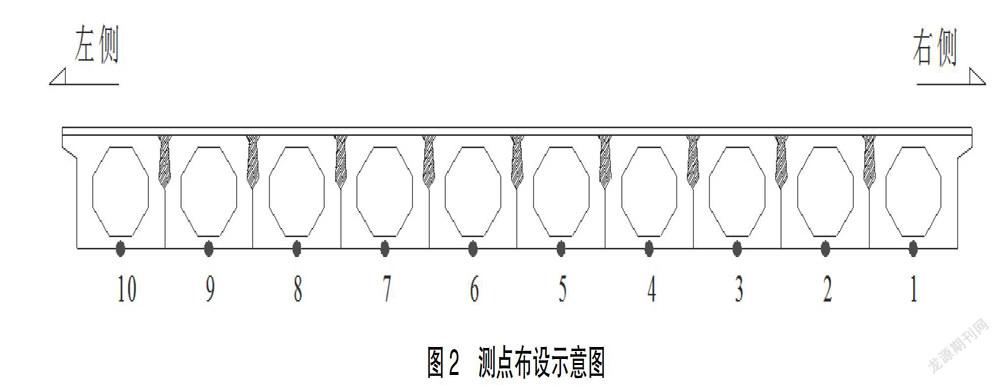
選擇橋梁第4跨進行測試,在橋梁梁底跨中截面布設4個撓度測量點(對應測點編號1、4、7、10),利用毫米波雷達實現橋梁動撓度的測量。車輛定位信息輸出速率及撓度采集頻率均設置為100 Hz。車輛定位系統精度5 cm,基于雷達的撓度測量系統精度0.1 mm,北斗時鐘服務器授時精度±2 ms。加載車為1輛3軸載重汽車,加載車總重34.3 t,其中前軸重8.1 t,中后軸共重26.2 t,前中軸距4.0 m,中后軸距1.4m。選取車道3跑車數據進行分析,4片梁影響線結果如下:
試驗結果表明,本文所提出的高空間分辨率動態影響線自動測量技術可有效的解決動態影響線快速自動化測量問題,具有良好的工程應用價值。
5 結束語
本文提出了一種高空間分辨率動態影響線自動測量技術,基于高精度MEMS組合導航,采用多傳感器數據融合技術將衛星定位與慣性測量相結合的車輛定位技術,有效解決中小橋復雜環境下的高空間分辨率動態車輛定位問題。基于GNSS絕對時間戳的數據同步采集與匹配方法,為數據自動匹配與分析提供保障。基于云平臺技術,實現遠程全自動化的測量。最終實橋驗證結果表明,該方法可有效的應用于橋梁動態影響線自動測量,為橋梁狀態評估提供有效支撐。
參考文獻:
[1]Sohn H,Farrar C R,Hemez F M,et al.A Review of Structural Health Review of Structural Health Monitoring Literature 1996-2001[J].Data? Acquisition,2002,la-13976.
[2]唐光武,廖敬波,趙巖,等.基于影響線的橋梁結構評定理論研究進展[J].公路交通技術,2008(06):39-43+47.
[3]廖敬波,唐光武,張又進,等.實測準靜態廣義影響線在橋梁結構靜載試驗中的應用研究[J].公路交通技術,2009(06):65-68.
[4]王寧波,任偉新,何立翔.基于橋梁動力響應的應變影響線提取[J].中南大學學報,2014,45(12):4362-4369.
[5]吳貴飛.基于實測位移影響線的橋梁結構損傷識別研究[D].北京工業大學,2017.
[6]余亭.基于影響線的橋梁快速安全評定方法研究[D].東南大學,2019.
[7]鄒武雷,基于實測影響線的中小跨徑梁橋承載力快速評定[J].福建交通科技,2020(04):88-93+64.
[8]Chon H D,Jun S,Jung H,et al.Using RFID for accurate positioning[J].Positioning,2005,3(1&2):32-39.
[9]Parker R,Valaee S,Vehicular node localization using received-signal-strength indicator[J].IEEE Transactions on Vehicular Technology,2007,56(06):3371-3380.
[10]張凡,基于北斗定位的車輛定位監控系統的設計[D].武漢理工大學,2014.
[11]徐愛功,曹楠,隋心,等.基于BDS/UWB的協同車輛定位方法[J].測繪科學,2020,45(06):1-8.