賽車(chē)車(chē)架動(dòng)態(tài)特性仿真、測(cè)試與評(píng)價(jià)
2020-09-14 08:29:56李長(zhǎng)玉戴海燕李淼林
實(shí)驗(yàn)室研究與探索 2020年7期
王 麗, 李長(zhǎng)玉, 戴海燕, 李淼林
(華南理工大學(xué)廣州學(xué)院汽車(chē)與交通工程學(xué)院,廣州510800)
0 引 言
振動(dòng)現(xiàn)象是工程結(jié)構(gòu)系統(tǒng)經(jīng)常遇到的問(wèn)題之一,在外界激勵(lì)(動(dòng)態(tài)載荷)的作用下,機(jī)械結(jié)構(gòu)會(huì)發(fā)生振動(dòng),研究機(jī)械結(jié)構(gòu)在動(dòng)態(tài)載荷作用下的振動(dòng)特性,即動(dòng)態(tài)特性。國(guó)內(nèi)外學(xué)者對(duì)于機(jī)械結(jié)構(gòu)的動(dòng)態(tài)特性研究較多。國(guó)外學(xué)者Harak等[1]以緩沖器和緩沖墊片為研究對(duì)象,采用自由模態(tài)分析和約束模態(tài)分析的方法,改進(jìn)了緩沖器的結(jié)構(gòu)。SUN等[2]以工業(yè)生產(chǎn)中應(yīng)用廣泛的薄壁件為研究對(duì)象,進(jìn)行振動(dòng)模態(tài)測(cè)試,以提高其模態(tài)特性。廖寧波等[3]以衛(wèi)星揚(yáng)聲器振膜作為研究對(duì)象,采用ANSYS Workbench仿真軟件對(duì)微型揚(yáng)聲器振膜進(jìn)行了有限元分析,并利用模態(tài)分析得出振膜的各階固有頻率和振動(dòng)形態(tài),提升了振膜性能。朱夢(mèng)等[4]對(duì)工業(yè)機(jī)器人的核心零件RV減速器進(jìn)行了有限元仿真和模態(tài)分析,并通過(guò)實(shí)驗(yàn)驗(yàn)證了仿真結(jié)果的可靠性,為后續(xù)研究結(jié)構(gòu)的動(dòng)態(tài)特性提供了參考。伍濟(jì)鋼等[5]對(duì)光流點(diǎn)匹配跟蹤的薄壁件進(jìn)行了有限元仿真和振動(dòng)模態(tài)測(cè)試,獲得了薄壁梁的固有頻率和模態(tài)振型。朱茂桃等[6]利用動(dòng)態(tài)性建模與仿真分析方法,開(kāi)發(fā)了一種具有阻尼切換功能的兩級(jí)阻尼半主動(dòng)液壓減震器。仇高賀等[7]對(duì)全地形車(chē)架建立有限元模型并獲得固有模態(tài)參數(shù),分析了滿(mǎn)載工況時(shí)車(chē)架頻率響應(yīng)特性和怠速工況時(shí)發(fā)動(dòng)機(jī)振動(dòng)對(duì)車(chē)架動(dòng)態(tài)性能的影響。李長(zhǎng)玉等[8]對(duì)車(chē)輛排氣系統(tǒng)進(jìn)行了有限元仿真和模態(tài)分析,分析了該排氣系統(tǒng)動(dòng)態(tài)特性。
有限元法和模態(tài)分析作為動(dòng)態(tài)特性分析方法,能較好地解決行業(yè)中的可靠性、耐久性等問(wèn)題,模態(tài)分析在賽車(chē)車(chē)架的設(shè)計(jì)中也逐步開(kāi)始運(yùn)用[9-12]。機(jī)械結(jié)構(gòu)的模態(tài)分析有仿真模態(tài)分析和實(shí)驗(yàn)?zāi)B(tài)分析兩種。賽車(chē)車(chē)架設(shè)計(jì)一般采用軟件仿真模態(tài)分析。本文以中國(guó)大學(xué)生方程式汽車(chē)大賽賽車(chē)車(chē)架為研究對(duì)象,探討賽車(chē)在行駛過(guò)程中來(lái)自路面和發(fā)動(dòng)機(jī)常用工況的激勵(lì)頻率對(duì)整個(gè)車(chē)架產(chǎn)生的振動(dòng),采用仿真模態(tài)分析和實(shí)驗(yàn)?zāi)B(tài)分析相結(jié)合的方法,研究其動(dòng)態(tài)特性,獲得了其前6階模態(tài)參數(shù)。對(duì)實(shí)驗(yàn)?zāi)B(tài)分析結(jié)果和仿真模態(tài)結(jié)果進(jìn)行了對(duì)比分析,模態(tài)振型和固有頻率是一致的,具有較好的動(dòng)態(tài)特性。
1 賽車(chē)車(chē)架結(jié)構(gòu)
1.1 賽車(chē)車(chē)架有限元建模
某賽車(chē)車(chē)架屬于非承載式車(chē)身,其結(jié)構(gòu)分前艙、駕駛艙和發(fā)動(dòng)機(jī)艙3部分,結(jié)構(gòu)示意圖如圖1所示。前隔板與前環(huán)之間為前艙、前環(huán)和主環(huán)之間為駕駛艙,主環(huán)之后為發(fā)動(dòng)機(jī)艙。
利用CATIA軟件建立車(chē)架初始模型。車(chē)架鋼管的建模采用CATIA掃略命令,直接將線(xiàn)框掃出圓柱面,在零部件設(shè)計(jì)中,將圓柱面增厚成管狀即可。對(duì)于前艙和駕駛艙,先建模出主環(huán)和前環(huán),導(dǎo)入95%的人體模型調(diào)節(jié)前艙和駕駛艙的尺寸,可建模出前艙和駕駛艙的框架。對(duì)于發(fā)動(dòng)機(jī)艙,將發(fā)動(dòng)機(jī)模型導(dǎo)入CATIA以此確定發(fā)動(dòng)機(jī)艙的輪廓。
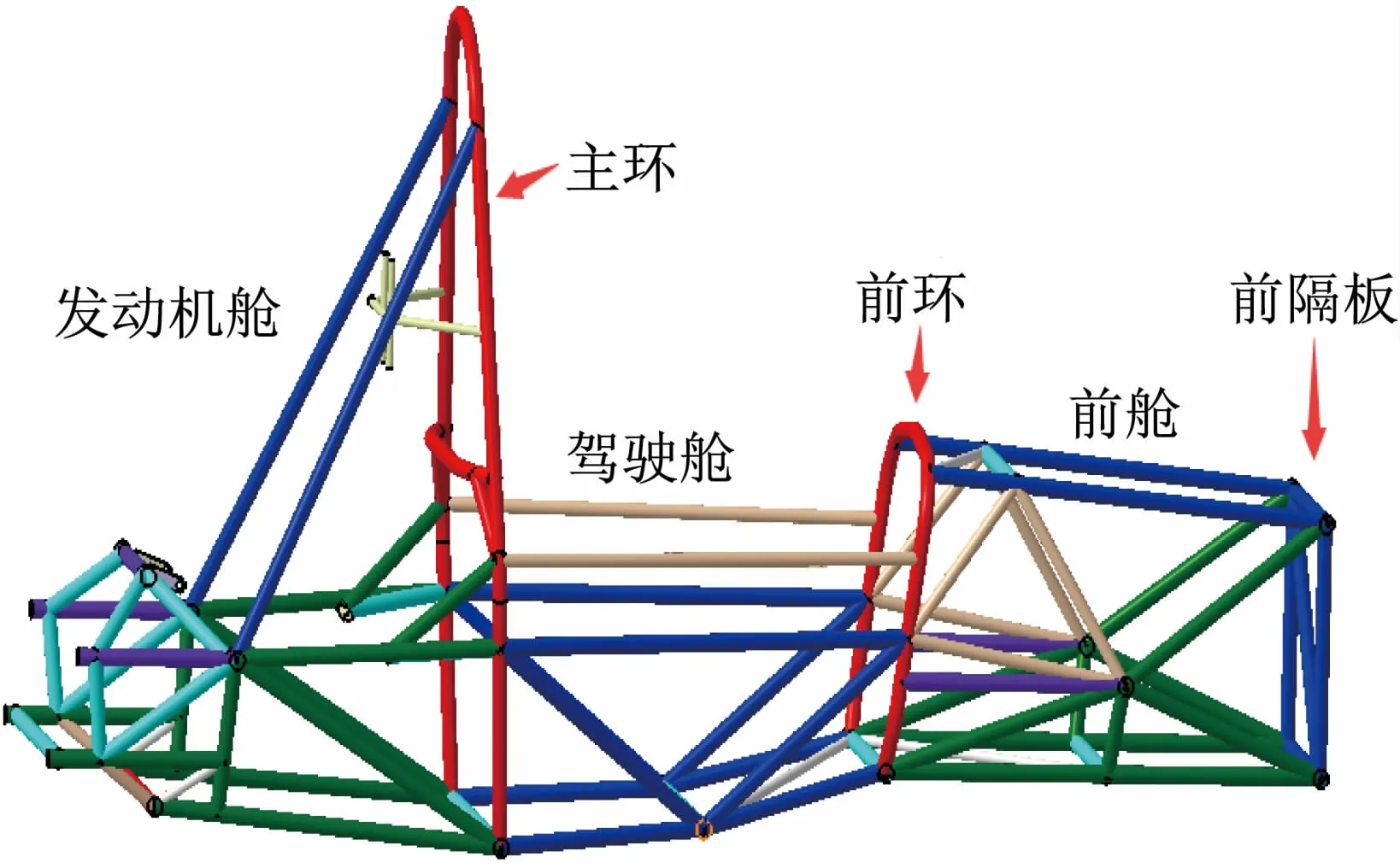
圖1 某賽車(chē)車(chē)架結(jié)構(gòu)示意圖
CATIA人體模型的依據(jù)是人機(jī)工程學(xué)。實(shí)際操作時(shí),將CATIA人體模型置于1∶1空間模型,如圖2所示,進(jìn)行校核,驗(yàn)證其合理性和可行性。根據(jù)實(shí)際賽車(chē)手駕駛姿勢(shì)的人體生理角度,包括人體尺寸、作業(yè)尺寸(手腿操控范圍)等,確定相應(yīng)的駕駛艙和前艙的尺寸、座椅位置、方向盤(pán)等參數(shù)(見(jiàn)表1)。7.83 g/cm3,屈服強(qiáng)度高,可達(dá)到680 ~695 MPa,力學(xué)性能好;且4130的Cr鉻和Mo鉬的含量比較高,材料比較堅(jiān)硬,碳的含量比例適中,特別適合焊接。因此該賽車(chē)車(chē)架材料選用4130鋼管。
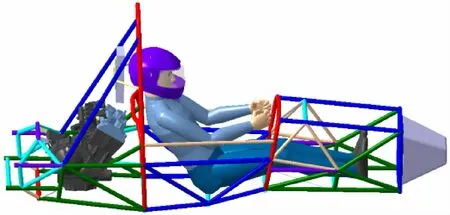
圖2 加載人體模型后的1∶1車(chē)架空間模型
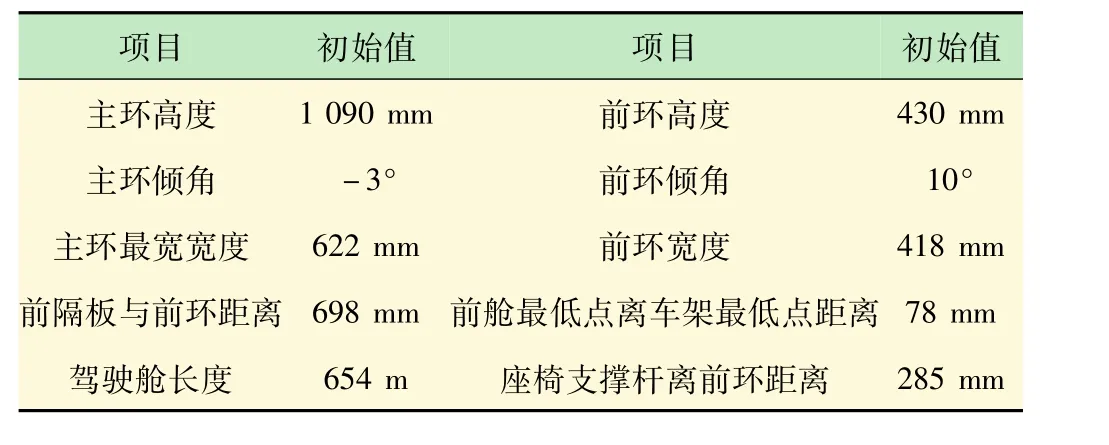
表1 人機(jī)車(chē)架尺寸
建立高質(zhì)量的有限元模型是ANSYS前處理非常重要的一步,構(gòu)建的模型越真實(shí),分析誤差就越小,網(wǎng)格的劃分非常關(guān)鍵。賽車(chē)車(chē)架選用4130圓鋼管,用梁?jiǎn)卧獎(jiǎng)澐志W(wǎng)格。設(shè)置單元格大小為1 mm,自動(dòng)生成網(wǎng)格。在不影響結(jié)果精度的前提下對(duì)模型進(jìn)行簡(jiǎn)化,為最大限度地減少誤差,依據(jù)小特征網(wǎng)格細(xì)化原則,用直線(xiàn)代替車(chē)架中鋼管彎曲的幾何結(jié)構(gòu)增加網(wǎng)格密度,力求結(jié)果精確并提高求解效率。在CATIA做好車(chē)架的線(xiàn)體后,導(dǎo)入ANSYS。
1.2 車(chē)架仿真模態(tài)分析
利用已建立的有限元模型,加載約束為固定懸架所有硬點(diǎn)。采用ANSYS軟件進(jìn)行仿真模態(tài)分析。為了能準(zhǔn)確地描述系統(tǒng)的動(dòng)態(tài)特性,設(shè)置求解系統(tǒng)的模態(tài)振型。低階模態(tài)振型相對(duì)高階振型對(duì)機(jī)械結(jié)構(gòu)的影響較大,因此本研究中計(jì)算前6階模態(tài)振型。
2 車(chē)架振動(dòng)模態(tài)實(shí)驗(yàn)
2.1 試驗(yàn)設(shè)計(jì)
為驗(yàn)證賽車(chē)車(chē)架結(jié)構(gòu)的動(dòng)態(tài)特性,采LMS-test lab系統(tǒng)(LMS振動(dòng)試驗(yàn)系統(tǒng)),進(jìn)行了Test.Lab的Impact錘擊法模態(tài)測(cè)試試驗(yàn)。對(duì)于實(shí)驗(yàn)采集到的數(shù)據(jù),要進(jìn)行加速度和力時(shí)域信號(hào)的減噪、時(shí)頻變換、功率譜計(jì)算和模態(tài)參數(shù)識(shí)別等工作,才能得出模態(tài)振型。實(shí)驗(yàn)中信號(hào)的處理和分析利用一般復(fù)雜模型的最小二乘復(fù)頻域模態(tài)識(shí)別方法(Least squares complex frequency domain method,LSCF)[13]。LSCT 1 采用頻響函數(shù)矩陣作為識(shí)別初始數(shù)據(jù),采用右矩陣分式模型描述其數(shù)學(xué)模型[14-15]:

式中:H(ω)為頻響函數(shù)矩陣,H(ω )∈MNa×Nb。Na為系統(tǒng)輸出數(shù),Nb為系統(tǒng)輸入數(shù)。而A(ω)、B(ω)∈MNa×Nb為矩陣多項(xiàng)式,即
式中:n為模態(tài)分析時(shí)的模型階次;Aj、Bj(j =0,1,…,n)為矩陣多項(xiàng)式的系數(shù);Ωj(w)為基函數(shù),定義為:

式中,Ts是采樣周期。
基于正則方程縮減最小二乘問(wèn)題,獲得壓縮正則方程為:

通過(guò)求解最小二乘問(wèn)題得到模態(tài)參數(shù)。該方法具有較強(qiáng)的抗干擾能力和優(yōu)秀的識(shí)別模態(tài)能力,特別是針對(duì)復(fù)雜機(jī)械結(jié)構(gòu)尤為突出,是目前國(guó)際上公認(rèn)的最優(yōu)秀的實(shí)驗(yàn)?zāi)B(tài)參數(shù)識(shí)別方法之一。利用LSCT 1[16]分析頻率響應(yīng)函數(shù)進(jìn)行模態(tài)識(shí)別,即在LMS振動(dòng)試驗(yàn)系統(tǒng)的Modal Analysis模塊對(duì)頻響函數(shù)進(jìn)行模態(tài)參數(shù)分析,得到車(chē)架前6階振型和固有頻率。
實(shí)驗(yàn)?zāi)B(tài)測(cè)試系統(tǒng)如圖3所示。
測(cè)試采用定點(diǎn)錘擊法,即在測(cè)試過(guò)程中選擇某一固定點(diǎn)作為參考點(diǎn)施加錘擊,在其他的測(cè)試點(diǎn)(又稱(chēng)測(cè)點(diǎn))進(jìn)行測(cè)量并采集數(shù)據(jù)。賽車(chē)車(chē)架的振動(dòng)測(cè)試包括發(fā)動(dòng)機(jī)艙、駕駛艙和前艙等相關(guān)位置,主要測(cè)試內(nèi)容為X(橫向)、Y(縱向)、Z(豎直)方向,共實(shí)施147 個(gè)測(cè)點(diǎn)。
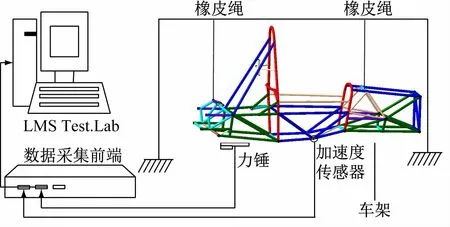
圖3 實(shí)驗(yàn)?zāi)B(tài)測(cè)試系統(tǒng)示意圖
2.2 錘擊法模態(tài)測(cè)試過(guò)程
測(cè)點(diǎn)工況為了測(cè)試整個(gè)車(chē)架振動(dòng)的動(dòng)態(tài)特性,選取影響較大的框架布置測(cè)點(diǎn),測(cè)點(diǎn)布置情況如圖4所示。
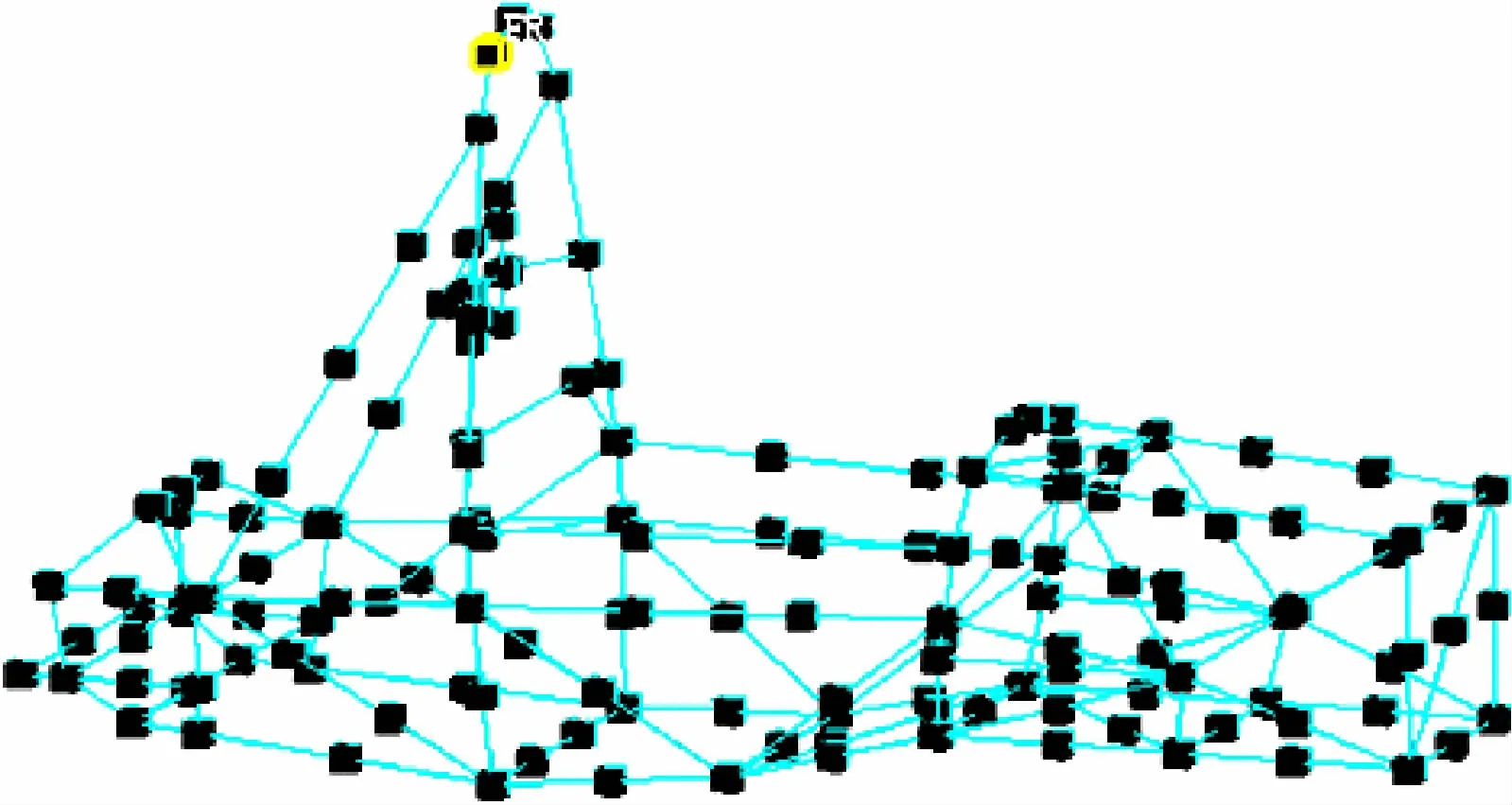
圖4 測(cè)試系統(tǒng)測(cè)點(diǎn)布置圖
同時(shí),LMS振動(dòng)試驗(yàn)系統(tǒng)的Geometry工作表里面車(chē)架點(diǎn)線(xiàn)框模型,點(diǎn)的方向要與3向加速度傳感器貼的方向一致,且根據(jù)車(chē)架的實(shí)況調(diào)節(jié)點(diǎn)的歐拉角即方向。
貼好加速度傳感器,將車(chē)架懸吊并保持水平。連接電腦和LMS振動(dòng)試驗(yàn)系統(tǒng)的測(cè)試設(shè)備,并保持各通道暢通,設(shè)定初始參數(shù),包括通道設(shè)置、錘擊示波、錘擊設(shè)置,開(kāi)始測(cè)量。
在測(cè)試時(shí),選取76號(hào)測(cè)點(diǎn)為參考點(diǎn),用力錘敲擊76號(hào)測(cè)點(diǎn)。加速度傳感器拾取其他測(cè)點(diǎn)X、Y、Z 3個(gè)方向的加速度信號(hào)。根據(jù)加速度信號(hào)和輸入的力信號(hào)可計(jì)算各點(diǎn)相對(duì)于參考點(diǎn)頻率響應(yīng)函數(shù)。其中第76號(hào)測(cè)點(diǎn)3個(gè)方向的頻率響應(yīng)如圖5所示。
3 對(duì)策振型對(duì)比分析與評(píng)價(jià)
3.1 賽車(chē)車(chē)架固有頻率對(duì)比
根據(jù)仿真模態(tài)分析和錘擊法模態(tài)實(shí)驗(yàn)測(cè)試得固有頻率,分析某賽車(chē)車(chē)架的動(dòng)態(tài)特性,各階次的固有頻率數(shù)據(jù)對(duì)比見(jiàn)表2。由表2的固有頻率對(duì)比可見(jiàn),實(shí)驗(yàn)?zāi)B(tài)分析對(duì)比仿真模態(tài)分析的固有頻率,相對(duì)誤差最小為4.5%、最大為第5階的8.55%,前6階相對(duì)誤差均在10%以?xún)?nèi),兩者固有頻率吻合度較高。因此,對(duì)于該賽車(chē)車(chē)架在實(shí)驗(yàn)?zāi)B(tài)分析得到的系統(tǒng)固有頻率與仿真計(jì)算分析得到的固有頻率具有較高的一致性。
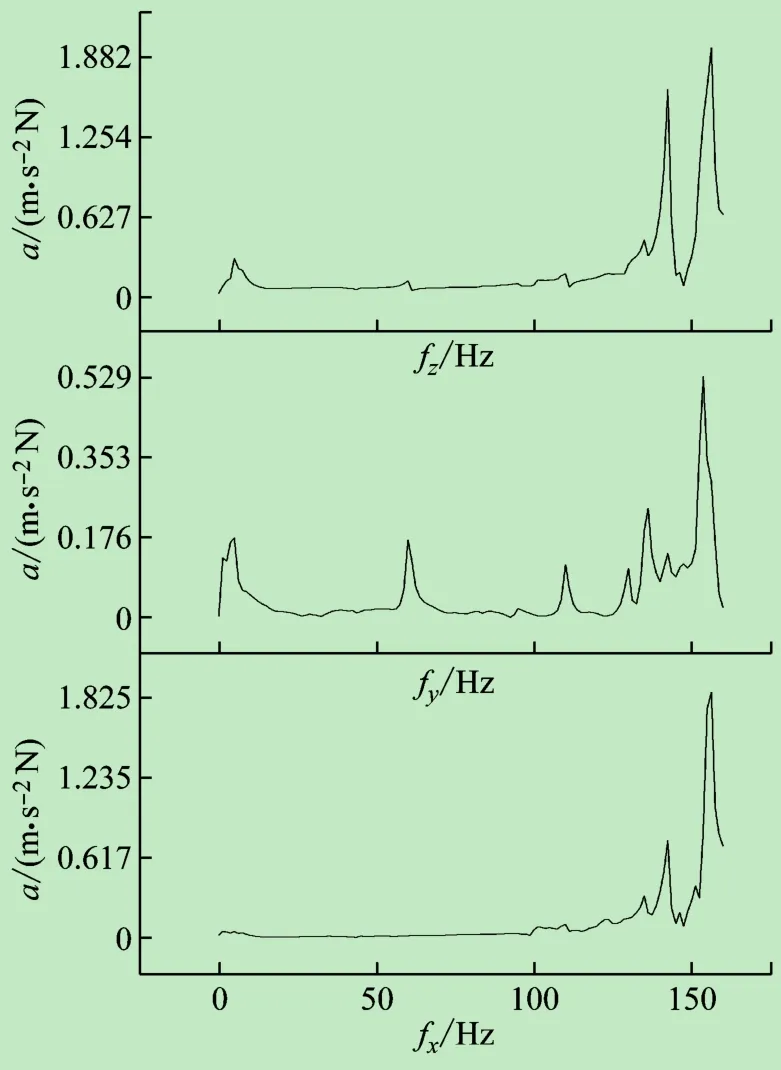
圖5 第76號(hào)測(cè)點(diǎn)頻率響應(yīng)函數(shù)圖
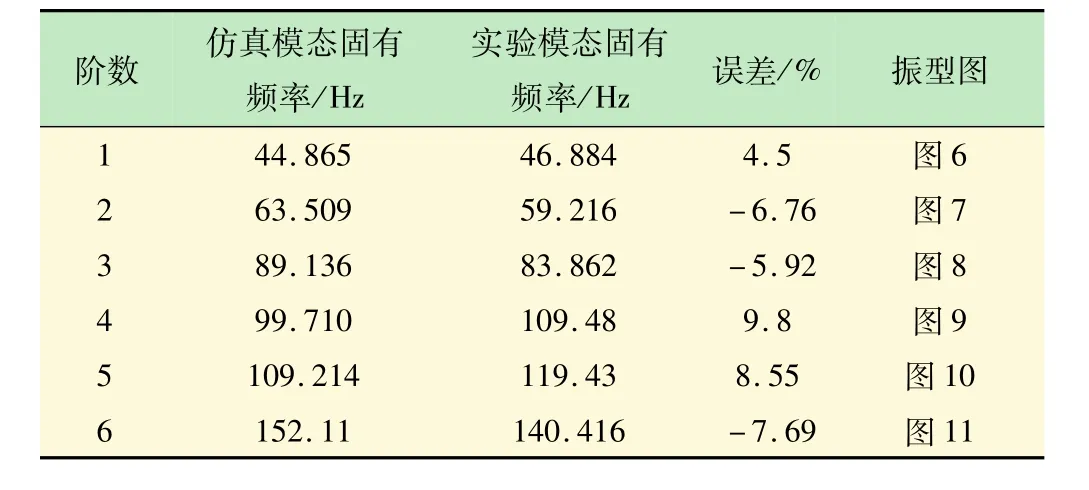
表2 仿真模態(tài)分析與實(shí)驗(yàn)?zāi)B(tài)分析固有頻率對(duì)比
3.2 賽車(chē)車(chē)架振型對(duì)比
圖6~11分別為某賽車(chē)車(chē)架的仿真模態(tài)和實(shí)驗(yàn)?zāi)B(tài)分析的前6階模態(tài)振型圖,其中圖6~11(a)為各階的仿真模態(tài)振型圖,圖6~11(b)為各階的實(shí)驗(yàn)?zāi)B(tài)振型圖。
圖6為車(chē)架的第1階模態(tài)振型,車(chē)架整體繞著中后部的Y軸發(fā)生垂直彎曲。駕駛艙后部至前環(huán)位置上偏移,使得發(fā)動(dòng)機(jī)艙、前艙位置有向下偏移趨勢(shì),駕駛艙后部的變形較大。通過(guò)比較,仿真計(jì)算和實(shí)驗(yàn)測(cè)試的第1階模態(tài)振型重合度較好。
圖7為車(chē)架的第2階模態(tài)振型,振型繞車(chē)架X軸發(fā)生彎曲,包含了S形側(cè)向彎曲、輕微的扭轉(zhuǎn)變形,且后端的駕駛艙變形較大。通過(guò)比較,仿真計(jì)算和實(shí)驗(yàn)測(cè)試的第2階模態(tài)振型重合度較好。
圖8為車(chē)架的第3階模態(tài)振型,振型繞車(chē)架中部Y軸發(fā)生彎曲,即垂直彎曲。前環(huán)至前艙發(fā)生上偏移,發(fā)動(dòng)機(jī)艙下偏移,主環(huán)至發(fā)動(dòng)機(jī)艙的變形較大。通過(guò)比較,仿真計(jì)算和實(shí)驗(yàn)測(cè)試的第3階模態(tài)振型重合度較好。
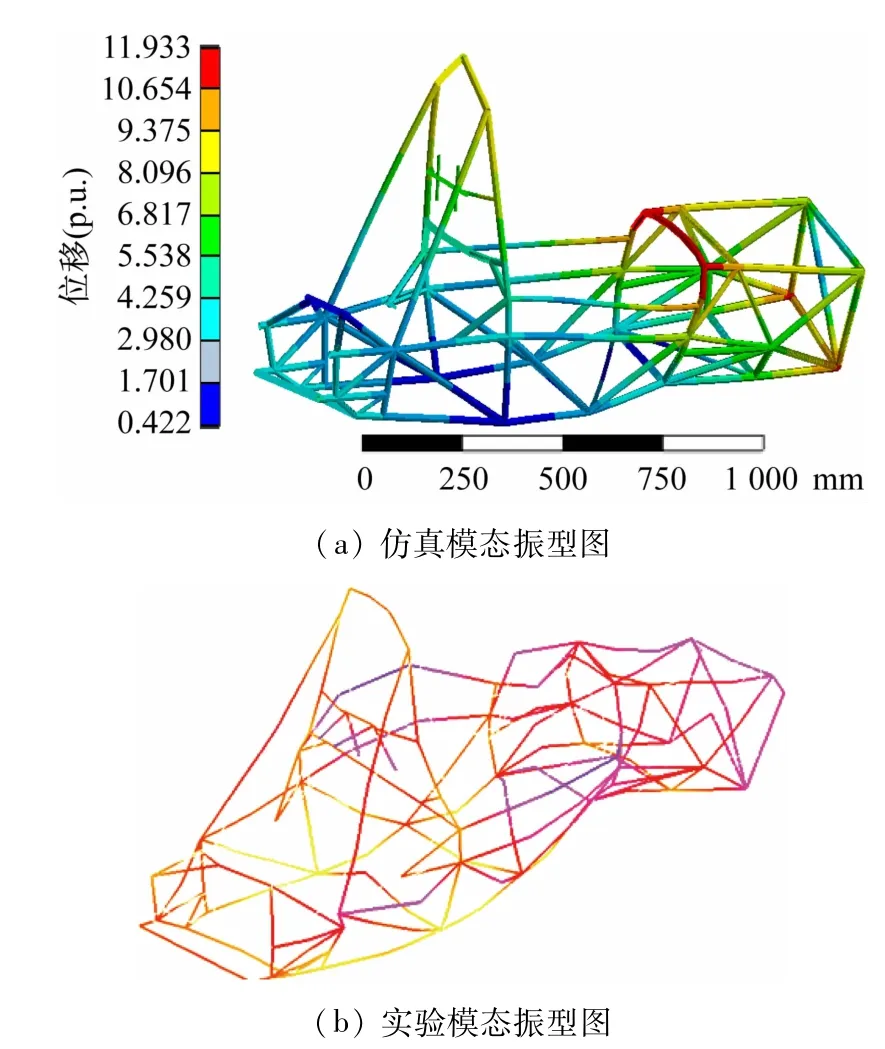
圖6 第1階模態(tài)振型對(duì)比
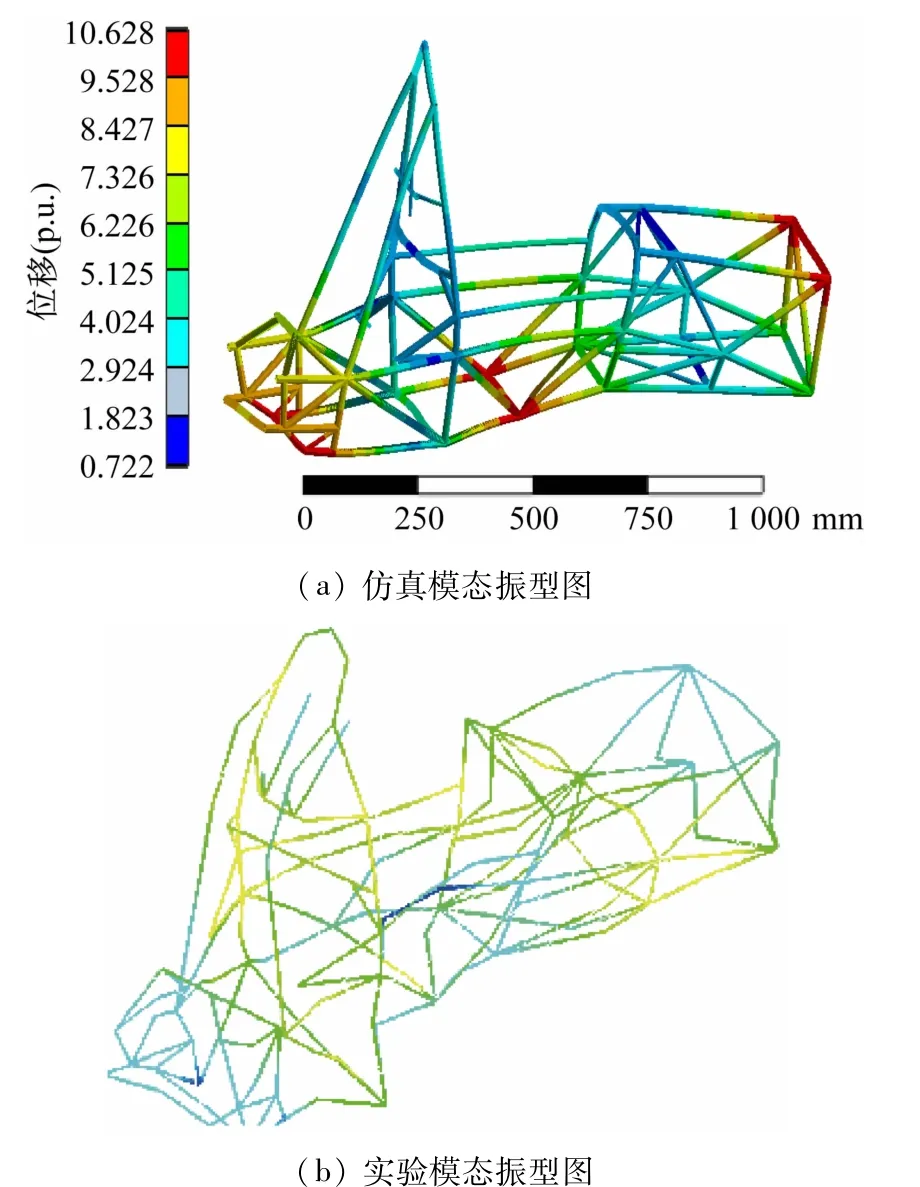
圖7 第2階模態(tài)振型對(duì)比
圖9 為車(chē)架的第4階模態(tài)振型,振型繞車(chē)架中部Y軸垂直彎曲,主環(huán)彎曲幅度較大。通過(guò)比較,仿真計(jì)算和實(shí)驗(yàn)測(cè)試的第4階模態(tài)振型重合度較好。
圖10為車(chē)架的第5階模態(tài)振型,振型繞車(chē)架X軸和Y軸均有彎曲,既有垂直彎曲,又有側(cè)向彎曲,可以看成是1階和2階的綜合。通過(guò)比較,仿真計(jì)算和實(shí)驗(yàn)測(cè)試的第5階模態(tài)振型重合度較好。
圖11為車(chē)架的第6階模態(tài)振型,輕微繞車(chē)架中部Y軸彎曲,側(cè)邊防撞桿以上主環(huán)振動(dòng)較劇烈。通過(guò)比較,仿真計(jì)算和實(shí)驗(yàn)測(cè)試的第6階模態(tài)振型重合度較好。
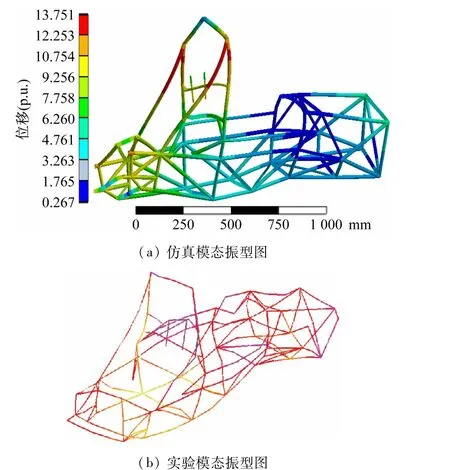
圖8 第3階模態(tài)振型對(duì)比
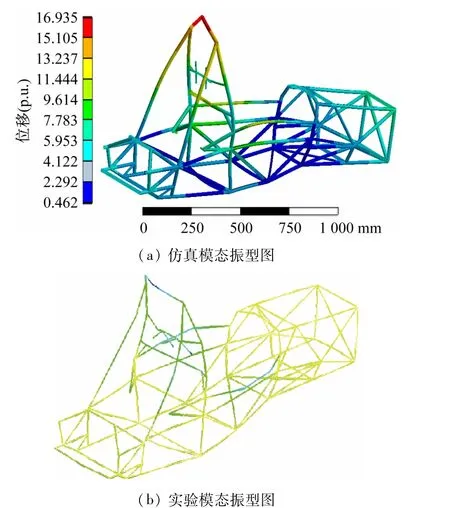
圖9 第4階模態(tài)振型對(duì)比
綜上所述,該車(chē)架模態(tài)振型主要表現(xiàn)為垂直彎曲、側(cè)向彎曲和輕微的扭轉(zhuǎn)。各階模態(tài)振型在固定頻率附近實(shí)驗(yàn)測(cè)試模態(tài)和仿真計(jì)算模態(tài)具有相同的振型,且二者體現(xiàn)的是同1階模態(tài)。
3.3 賽車(chē)車(chē)架動(dòng)態(tài)特性分析與評(píng)價(jià)
賽車(chē)在實(shí)際行駛過(guò)程中的激勵(lì)主要有兩種,一是來(lái)自路面的激勵(lì),二是發(fā)動(dòng)機(jī)常用工況對(duì)整個(gè)車(chē)架產(chǎn)生的振動(dòng)。
由于賽道路面較為平緩,可參考城市交通較好的路面。根據(jù)實(shí)際,當(dāng)車(chē)速80 km/h左右時(shí),路面激勵(lì)頻率通常為3 Hz以下,車(chē)輪不平衡引起的激振頻率通常為11 Hz以下。從表3的模態(tài)分析結(jié)果可知,車(chē)架的低階固有頻率高于路面和車(chē)輛不平衡引起的激振頻率范圍。避免了路面激勵(lì)與賽車(chē)車(chē)架發(fā)生共振。
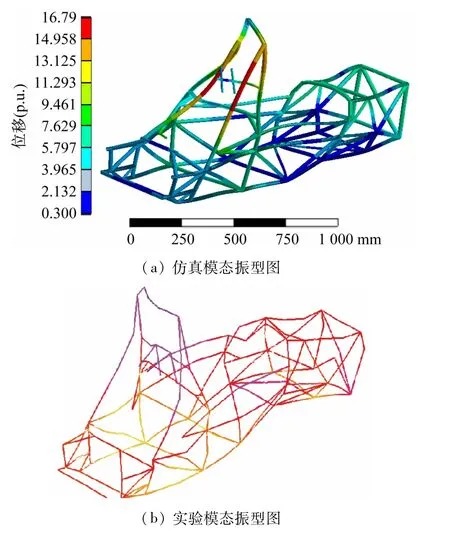
圖10 第5階模態(tài)振型對(duì)比
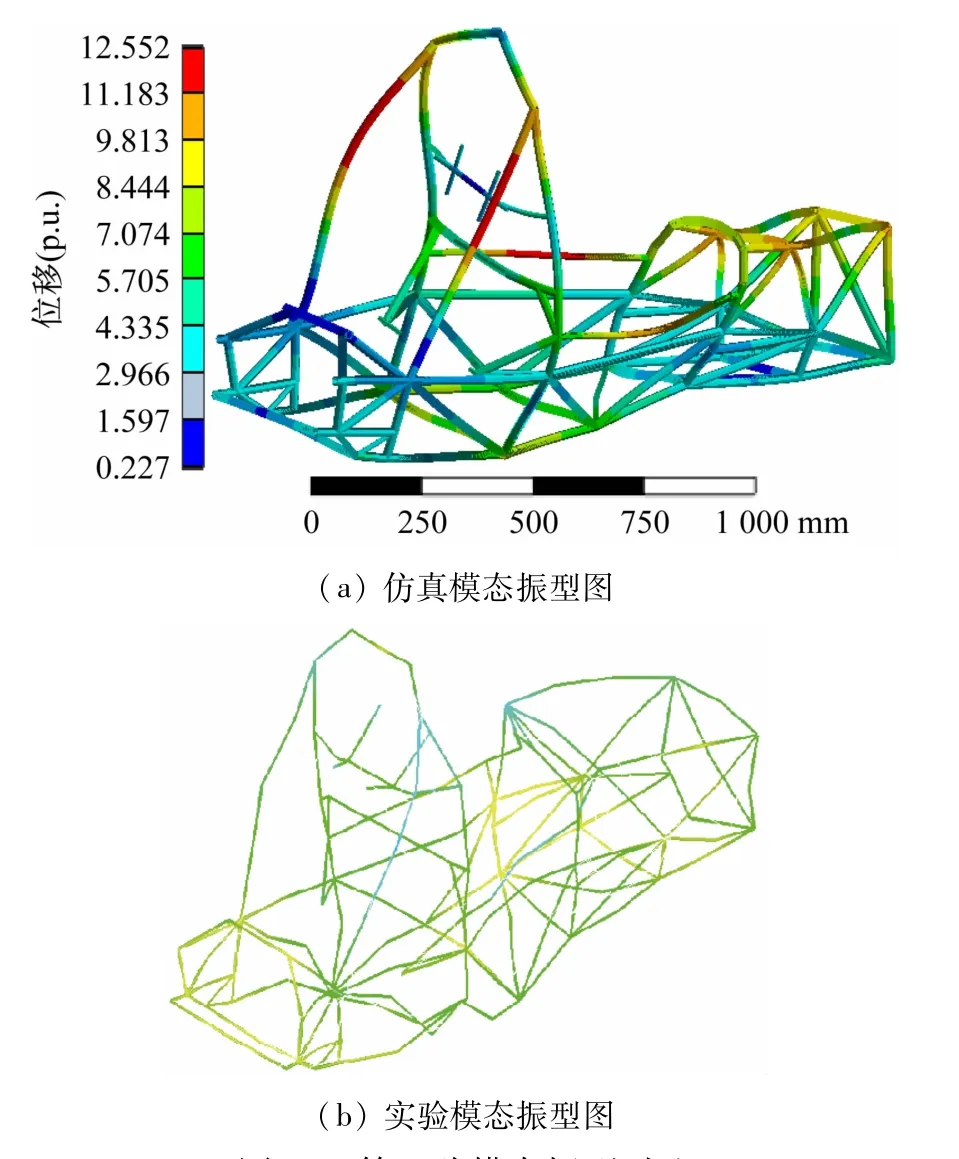
圖11 第6階模態(tài)振型對(duì)比
發(fā)動(dòng)機(jī)激勵(lì)頻率是由發(fā)動(dòng)機(jī)轉(zhuǎn)速?zèng)Q定的,發(fā)動(dòng)機(jī)激勵(lì)頻率:

式中:n′為發(fā)動(dòng)機(jī)轉(zhuǎn)速;i′為發(fā)動(dòng)機(jī)缸數(shù);τ為賽車(chē)發(fā)動(dòng)機(jī)沖程數(shù)。賽車(chē)發(fā)動(dòng)機(jī)型號(hào)為4缸4沖程CBR600,根據(jù)此發(fā)動(dòng)機(jī)相關(guān)數(shù)據(jù)可知,該賽車(chē)常用轉(zhuǎn)速為12 000 ~15 000 r/min,由式(5)計(jì)算獲得對(duì)應(yīng)的振動(dòng)頻率為400~500 Hz;怠速工況下轉(zhuǎn)速為4 000 r/min左右,對(duì)應(yīng)的振動(dòng)頻率為133Hz。對(duì)比表2中的固有頻率值,這兩種工況下前5階模態(tài)固有頻率與發(fā)動(dòng)機(jī)的激勵(lì)頻率相差較大,第6階模態(tài)的固有頻率與發(fā)動(dòng)機(jī)怠速工況激勵(lì)頻率相差不大,而怠速時(shí)間很短暫,即使發(fā)生共振的時(shí)間也很短暫,可以忽略。
以實(shí)驗(yàn)測(cè)試賽車(chē)車(chē)架的固有頻率,根據(jù)式(5)計(jì)算對(duì)應(yīng)賽車(chē)發(fā)動(dòng)機(jī)轉(zhuǎn)速,見(jiàn)表3。
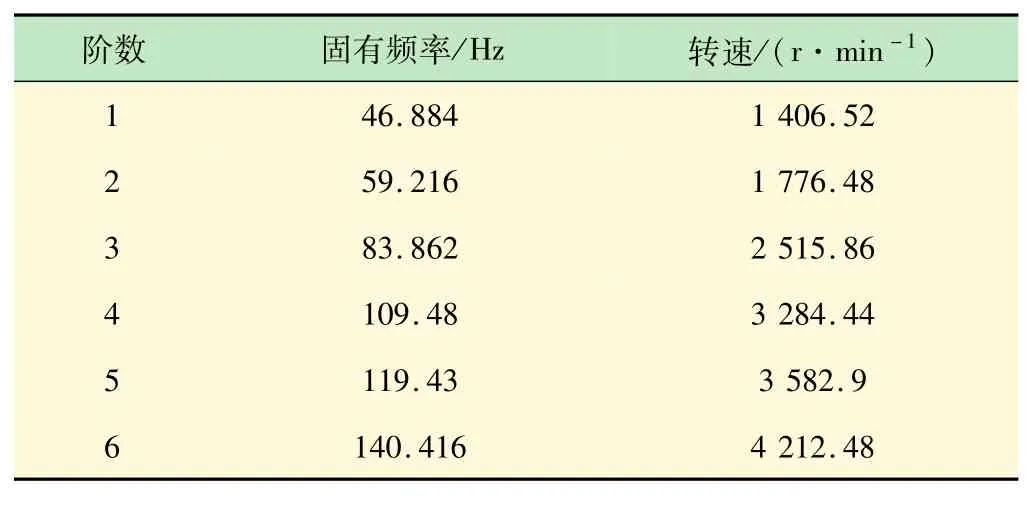
表3 某賽車(chē)發(fā)動(dòng)機(jī)固有頻率和轉(zhuǎn)速
由表3可知,該賽車(chē)車(chē)架前5階固有頻率與外界激勵(lì)頻率相差較遠(yuǎn),對(duì)應(yīng)轉(zhuǎn)速小于發(fā)動(dòng)機(jī)怠速轉(zhuǎn)速。第6階模態(tài)固有頻率對(duì)應(yīng)的賽車(chē)發(fā)動(dòng)機(jī)轉(zhuǎn)速4 212.48 r/min,相比較該賽車(chē)發(fā)動(dòng)機(jī)的怠速工況轉(zhuǎn)速4 000 r/min,相差不大,但怠速工況4 000 r/min為不常用轉(zhuǎn)速,且怠速發(fā)生時(shí)間很短,可以忽略。因此,該賽車(chē)車(chē)架在前6階模態(tài)很大程度上避免共振現(xiàn)象的發(fā)生,該車(chē)架具有較好的動(dòng)態(tài)行駛性能。
4 結(jié) 語(yǔ)
本文利用仿真計(jì)算模態(tài)和實(shí)驗(yàn)?zāi)B(tài)對(duì)比分析的方法對(duì)某賽車(chē)車(chē)架的動(dòng)態(tài)特性進(jìn)行了分析和評(píng)價(jià)。兩者誤差較小,說(shuō)明建立的賽車(chē)車(chē)架有限元模型質(zhì)量較高,計(jì)算結(jié)果正確。同時(shí),兩者得到的該賽車(chē)固有頻率與發(fā)動(dòng)機(jī)工作激勵(lì)頻率相差較大,可避免工作激勵(lì)引起賽車(chē)車(chē)架共振;該賽車(chē)車(chē)架前5階固有頻率與外界激勵(lì)頻率相差較遠(yuǎn),對(duì)應(yīng)轉(zhuǎn)速小于發(fā)動(dòng)機(jī)怠速轉(zhuǎn)速,能避開(kāi)共振,動(dòng)態(tài)特性較好。
本文的方法可應(yīng)用與賽車(chē)車(chē)架開(kāi)發(fā)環(huán)節(jié),在保證設(shè)計(jì)賽車(chē)車(chē)架較好動(dòng)態(tài)性能的同時(shí)縮短開(kāi)發(fā)周期,降低開(kāi)發(fā)成本。本文的結(jié)論對(duì)賽車(chē)車(chē)架動(dòng)態(tài)特性設(shè)計(jì)具有一定的指導(dǎo)意義。
·名人名言·
我們應(yīng)該使每一個(gè)學(xué)生在畢業(yè)時(shí)候,帶走的不僅僅是一些知識(shí)和技能,最重要的是要帶走渴求知識(shí)的火花,并使它終生不熄地燃燒下去。
——蘇霍姆林斯基
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
小獼猴智力畫(huà)刊(2022年9期)2022-11-04 02:31:42
天天愛(ài)科學(xué)(2020年6期)2020-09-10 07:22:44
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00
計(jì)算物理(2014年2期)2014-03-11 17:01:44