提升乘用車前輪外傾角裝配一致性的技術(shù)方案及應(yīng)用
2020-09-14 12:17:24周懌
時(shí)代汽車 2020年15期
周懌


摘 要:本文針對(duì)麥弗遜懸架前輪外傾角的主要影響因素(減振器與轉(zhuǎn)向節(jié)的裝配)的產(chǎn)品特點(diǎn)設(shè)計(jì)設(shè)備控制方案,并應(yīng)用于實(shí)際,實(shí)現(xiàn)提升前輪外傾角一致性以及產(chǎn)品品質(zhì)。
關(guān)鍵詞:前輪外傾角 乘用車 設(shè)備設(shè)計(jì)
前輪外傾是指前輪安裝后,其上端向外傾斜,于是前輪的旋轉(zhuǎn)平面與縱向垂直平面間形成一個(gè)夾角,稱之為前輪外傾角,其主要作用是使轉(zhuǎn)向輕便,使車輪緊靠輪轂內(nèi)軸承,以減少外軸承及輪轂螺母的負(fù)荷,有利于安全行駛。
汽車前輪外傾角涉及多個(gè)系統(tǒng)、多個(gè)零件設(shè)計(jì)、制造與裝配因素影響,其中制造裝配過(guò)程中,減振器與轉(zhuǎn)向節(jié)的裝配因素是影響前輪外傾角波動(dòng)的重要因素,減振器與轉(zhuǎn)向節(jié)的裝配精度高,則前輪外傾角波動(dòng)范圍小,反之則大。
1 前輪外傾角超差
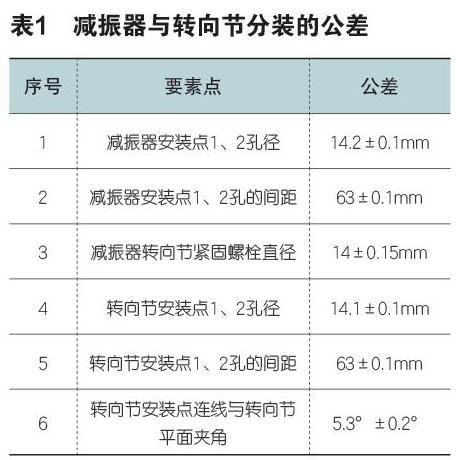
某產(chǎn)品車型在生產(chǎn)驗(yàn)證階段統(tǒng)計(jì)左右前輪外傾角過(guò)線檢測(cè)數(shù)據(jù),以左前輪外傾角為例,其統(tǒng)計(jì)數(shù)據(jù)呈正態(tài)分布,分布離散度較高,時(shí)有前輪外傾角超差的不良發(fā)生,經(jīng)統(tǒng)計(jì)不良率達(dá)1.87%,根據(jù)理論公差進(jìn)行尺寸鏈計(jì)算,其中轉(zhuǎn)向節(jié)與減振器的安裝精度對(duì)外傾角不良貢獻(xiàn)最大[1]。在減振器與轉(zhuǎn)向節(jié)裝配過(guò)程,減振器與轉(zhuǎn)向節(jié)分裝的公差如表1所示。
如圖1,以上公差將造成減振器與轉(zhuǎn)向節(jié)的安裝存在角度波動(dòng),由于轉(zhuǎn)向節(jié)與制動(dòng)盤已緊固成一個(gè)整體,以制動(dòng)盤表面定位基準(zhǔn)面,即減振器中心線與制動(dòng)盤表面的夾角X存在△X的波動(dòng),如能夠減小△X的波動(dòng),提高X的角度精度,則可以有效保證減振器與轉(zhuǎn)向節(jié)裝配的一致性,從而保證減振器與轉(zhuǎn)向節(jié)的安裝精度。因此,如何保證減振器與轉(zhuǎn)向節(jié)的裝配一致性是實(shí)際生產(chǎn)過(guò)程保證前輪外傾角的關(guān)鍵。
2 技術(shù)方案結(jié)構(gòu)原理
通過(guò)機(jī)構(gòu)裝置保證減振器與轉(zhuǎn)向節(jié)裝配穩(wěn)定性,設(shè)計(jì)一個(gè)曲柄滑塊機(jī)構(gòu),如圖2所示,從結(jié)構(gòu)分析控制減振器中心線與制動(dòng)盤表面的原理。以制動(dòng)盤表面為垂直基準(zhǔn)面(固定不動(dòng)),當(dāng)前夾角a,通過(guò)測(cè)量可得滑塊與減振器旋轉(zhuǎn)軸的水平距離B以及垂直距離A,當(dāng)伺服控制滑塊移動(dòng)的距離為△h時(shí),則夾角從a調(diào)整為a1:
a1=a+△a
△a=b-b1
從而建立a1與△h之間的關(guān)系:
本機(jī)構(gòu)裝置中,以該車型產(chǎn)品為例,當(dāng)a=5.25°,A=132.4mm,B=350mm,伺服電機(jī)控制滾珠絲桿螺母位移的分辨率(最小位移)為0.01mm。
最小夾角的調(diào)整角度(即機(jī)構(gòu)裝置的分辨率):
a2=0.001637°=0.098′
通過(guò)設(shè)計(jì)一種機(jī)構(gòu)裝置,實(shí)現(xiàn)精確控制△h參數(shù),從而精確控制減振器與轉(zhuǎn)向節(jié)角度a1參數(shù),并且參數(shù)實(shí)時(shí)可調(diào),減小生產(chǎn)過(guò)程中前輪外傾角的波動(dòng),提升一致性,提高裝配品質(zhì)。
3 設(shè)備解決措施
該外傾角保證機(jī)構(gòu)裝置主要由伺服電機(jī)、減速機(jī)、聯(lián)軸器、滾珠絲桿、螺母座、鉸鏈座、滑塊、直線導(dǎo)軌、旋轉(zhuǎn)臂以及減振器夾緊保持機(jī)構(gòu)組成,如圖3所示。
1伺服電機(jī)通過(guò)2減速機(jī)以及3聯(lián)軸器控制4滾珠絲桿旋轉(zhuǎn),從而使絲桿螺母產(chǎn)生直線運(yùn)動(dòng),5螺母座通過(guò)6鉸鏈座控制7滑塊在8直線導(dǎo)軌上進(jìn)行直線運(yùn)動(dòng),8直線導(dǎo)軌與9旋轉(zhuǎn)臂起到曲柄的作用,9旋轉(zhuǎn)臂控制10減振器夾緊保持機(jī)構(gòu)繞著減振器總成旋轉(zhuǎn)軸旋轉(zhuǎn)角度,從而完成夾角△a的調(diào)整。
通過(guò)結(jié)構(gòu)原理分析,可建立滑塊位移量與角度調(diào)整機(jī)構(gòu)的聯(lián)系,伺服電機(jī)可以外接PLC,并建立滑塊位移量與角度調(diào)整機(jī)構(gòu)的聯(lián)系,伺服電機(jī)的位移參數(shù)可通過(guò)PLC程序精確顯示在觸摸屏上,調(diào)節(jié)伺服電機(jī)的位移參數(shù),即可調(diào)整滑塊位移量△h和減振器總成的轉(zhuǎn)動(dòng)角度a1,實(shí)現(xiàn)保證角度實(shí)時(shí)可調(diào);減速電機(jī)用于調(diào)節(jié)輸出的轉(zhuǎn)速;兩者配合使用,即可精確調(diào)整滑塊和減振器總成的轉(zhuǎn)動(dòng)角度。
將該外傾角保證機(jī)構(gòu)裝置集成在設(shè)備整體中,如圖4所示,設(shè)備主要包含機(jī)架、觸摸控制屏、制動(dòng)盤轉(zhuǎn)向節(jié)定位夾緊機(jī)構(gòu)、減振器定位夾持機(jī)構(gòu)、外傾角調(diào)整機(jī)構(gòu)、螺栓擰緊機(jī)構(gòu)、螺栓擰緊反力機(jī)構(gòu)、以及相應(yīng)的氣動(dòng)系統(tǒng)。制動(dòng)盤轉(zhuǎn)向節(jié)定位夾緊機(jī)構(gòu)主要用于實(shí)現(xiàn)制動(dòng)盤轉(zhuǎn)向節(jié)的定位與夾緊,減振器定位保持調(diào)整機(jī)構(gòu)主要用于固定減振器,并且具備調(diào)整減振器中心線與減振器表面夾角的功能,擰緊機(jī)構(gòu)主要實(shí)現(xiàn)減振器與轉(zhuǎn)向節(jié)之間兩個(gè)螺栓/螺母的緊固達(dá)到工藝力矩目標(biāo),擰緊反力機(jī)構(gòu)主要功能在擰緊機(jī)構(gòu)擰緊的同時(shí),固定住減振器與轉(zhuǎn)向節(jié)之間的兩個(gè)螺栓,防止緊固過(guò)程空轉(zhuǎn)。設(shè)備動(dòng)作區(qū)域設(shè)置了安全光柵,一旦設(shè)備動(dòng)作過(guò)程中出現(xiàn)闖光柵情況,設(shè)備立即停止運(yùn)行,有效保證設(shè)備安全性,大大降低了人員勞動(dòng)強(qiáng)度,有效提高生產(chǎn)效率。
該設(shè)備的作業(yè)流程要求如下:
(1)工件上料。人工將轉(zhuǎn)向節(jié)以及減振器總成吊裝于設(shè)備制動(dòng)盤轉(zhuǎn)向節(jié)定位機(jī)構(gòu)上;
(2)人工啟動(dòng)操作盒的按鈕,氣缸伸出壓緊制動(dòng)盤轉(zhuǎn)向節(jié),制動(dòng)盤轉(zhuǎn)向節(jié)總成完全定位;伺服電機(jī)啟動(dòng)帶動(dòng)減振器定位夾持機(jī)構(gòu)整體往減振器方向伸出并夾緊固定減振器滑柱外表面并按照設(shè)定的角度矯正減振器滑柱軸線方向相對(duì)于制動(dòng)盤平面方向的角度;
(3)擰緊機(jī)構(gòu)與擰緊反力機(jī)構(gòu)通過(guò)各自氣缸驅(qū)動(dòng),一起向減振器與轉(zhuǎn)向節(jié)總成之間的螺栓與螺母靠攏;裝置檢測(cè)擰緊機(jī)構(gòu)與擰緊反力機(jī)構(gòu)到位,同時(shí)到位后伺服擰緊工具套筒與螺母對(duì)位,反力套筒與螺栓對(duì)位。擰緊工具自動(dòng)啟動(dòng)擰緊。
(4)擰緊合格后,所有機(jī)構(gòu)按照順序原路徑返回復(fù)位。
(5)人工將減振器與制動(dòng)盤轉(zhuǎn)向節(jié)總成吊裝出設(shè)備工作臺(tái)。
4 設(shè)備驗(yàn)證
設(shè)備導(dǎo)入后,將設(shè)備觸摸屏上的角度參數(shù)設(shè)置為該車型的數(shù)模狀態(tài)的角度5.25°,用水平角度儀測(cè)試減振器定位夾持機(jī)構(gòu)的實(shí)際角度,與設(shè)置的角度一致,滿足設(shè)備的使用要求,使用該設(shè)備分裝減振器與轉(zhuǎn)向節(jié)連接,測(cè)試監(jiān)控250臺(tái),不良率為0,數(shù)據(jù)統(tǒng)計(jì)結(jié)果如下圖。
制程能力指數(shù)CPK>1.33,制程能力較好,改善效果明顯,可滿足生產(chǎn)要求。
5 結(jié)語(yǔ)
采用此設(shè)備技術(shù)方案,運(yùn)動(dòng)機(jī)構(gòu)由氣缸以及伺服電機(jī)控制,采用各獨(dú)立工裝與運(yùn)動(dòng)機(jī)構(gòu)固定前減振器與轉(zhuǎn)向節(jié),同時(shí)實(shí)現(xiàn)自動(dòng)高精度擰緊,既保證了減振器中心線與減振器表面夾角,也確保了擰緊裝配的品質(zhì),同時(shí)還可以根據(jù)不同車型調(diào)整各工裝機(jī)構(gòu)位置以適應(yīng)不同的車型,并且能夠自動(dòng)調(diào)整減振器中心線與減振器表面夾角裝配保證角度,自動(dòng)切換裝配力矩,實(shí)現(xiàn)多車型兼容,減小生產(chǎn)過(guò)程中前輪外傾角的波動(dòng),大大降低了人員勞動(dòng)強(qiáng)度,有效提高生產(chǎn)效率以及裝配品質(zhì)。
參考文獻(xiàn):
[1]滕曉濤,汪璟.《基于3DCS的汽車前輪外傾角偏差分析》.《機(jī)械研究與應(yīng)用》,2019年第3期第32卷.
