智能駕駛車輛環境感知傳感器的布置
2020-09-14 12:17:24馮麗
時代汽車 2020年15期
馮麗

摘 要:環境感知是智能駕駛四大核心技術之一,為智能車采集各類環境信息,給路徑規劃提供決策依據,本文結合某車型的感知傳感器布置方案,給出相關傳感器在實際布置中的規則。
關鍵詞:智能駕駛 環境感知 傳感器 布置
1 引言
智能駕駛車輛對于環境的感知要求較高,每種類型的傳感器都具有其獨特優勢和運用場景,各行其是的運用不僅有短板[1],也達不到全方位探測的目的。僅使用視覺攝像頭,目標運動狀態及距離判斷不夠精確;僅使用超聲波雷達不能滿足遠距離、標志識別;僅用激光雷雖然滿足了距離與精度,但煙、塵、霧影響較大[2],成本代價太大,不足能滿足量產落地需求,智能駕駛對于傳感器的需求勢必走向多種類融合的局勢。
2 車企智能駕駛環境感知配置方案
某車型配置前向側向激光雷達、角毫米波雷達、前向毫米波雷達、單目前置攝像頭,超聲波雷達。前向激光雷達用于實現較高精度遠距離掃描,側向雷達用于相鄰車道車輛檢測,前視攝像頭感知交通信號燈、交通標識等信息,角毫米波雷達彌補車輛四角處盲區,前向毫米波雷達探測中遠程范圍內行人、車輛,同時與角毫米波雷達構成一定范圍內的冗余設計,超聲波雷達實現車輛5米內障礙物探測,以此達到對車輛周圍環境全面感知。
3 各類感知器件布置
3.1 視覺攝像頭布置規則
布置高度由地面最近探測點同攝像頭視野中心的連線與水平面夾角構成的直角三角形依據勾股定理推測得出,探測范圍由每個攝像頭的視場角決定。當攝像頭傾斜角度、高度確定后,仍有小范圍內偏差,可通過調整攝像頭內部結構進行微調。該調整角度一般為5°左右。通常前擋風玻璃處的前視攝像安裝高度為1500mm~1800mm,對于360環視前攝像頭較多安裝于前格柵處,利用格柵對攝像頭進行隱藏,起到一定程度上的美觀作用,左右攝像頭安裝于后視鏡處,后視攝像頭與普通倒車影像攝像頭在布置上差別不大,主要滿足視圖中的車身占比20%左右,牌照板幾何視角和照明法規角度,如圖1和圖2所示。
3.2 超聲波雷達布置規則
對于車前雷達一般布置在400mm-550mm高度,車后保險杠處400mm-65mm;超聲波雷達因其探測距離較近,價格低,主要考慮對車輛全周的覆蓋,依據其探測波束角度大小覆蓋范圍來確定雷達探頭的個數,當前主流用法是8-12個。
3.3 毫米波雷達布置規則
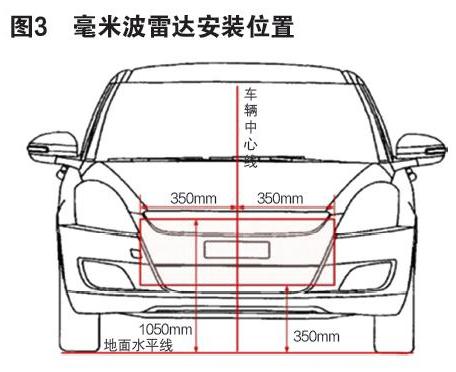
前向毫米波高度離地700mm左右,可在以車輛中心線為對稱軸的左右350mm內進行布置,如圖3所示,雖然算法可在一定程度上進行參數修正,一般布置于中線處居多。安裝時水平偏差角度±2°,垂直偏差角度±1°。因雷達的波束中心面需與路面基本平行,避免因安裝角度導致與路面的夾角大于5°[2]。角毫米波雷達的離地高度可與前向毫米波雷達保持一致,呈對稱方式布置在車身四角處,車輛前部的角毫米雷達與車身側垂直面角度呈45°,車輛后角毫米波雷達呈15°至30°,因不同車型對區域功能需要各異,可根據整車盲區的要求對角度偏轉做調整,達到最佳的探測區域。
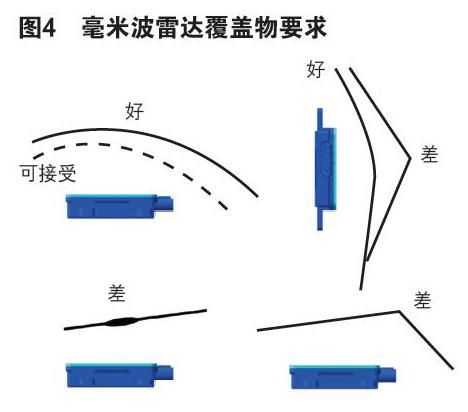
一般為了保證毫米波雷達探測距離遠、盡可能多的探測目標數,采用外露布置,但外露布置對造型美觀有較大影響,必要時需考慮隱藏布置,此時覆蓋面與雷達之間保持20mm距離,距離內的探測區域應避免出卡子、螺釘、金屬物體,同時,覆蓋面必須保證平整且平滑、厚度均勻,表面粗糙度小于400um,避免出現棱骨、尖角、切向厚度突變(見圖4),以此減小毫米波在反射時發生偏轉、損耗等。
因材料會對電磁波產生干擾而降低毫米波雷達性能,故對于覆蓋材料及厚度也有嚴格要求,下表1為不同材料厚度對毫米波的損耗。在對整車環境感知布置時需提前將特殊要求輸入給造型及內外飾,防止因后續空間、材料、結構上的限制帶來的性能降級。
3.4 激光雷達布置規則
激光雷達離地高度需根據功能需求而定,一般情況下為充分發揮混合固態激光雷達高精度、遠距離測量優勢,將其安裝于車頂(因激光雷達垂直探測角度有限,目前有32°角,可根據需求距離運用三角函數計算對地高度),設計時傾斜角盡量不要超過90度,角度過大時會對縮短激光雷達使用壽命;長距前向激光雷達傾斜角度可在5°范圍內,保證車輛正前方環境掃描,用于側向的激光雷達傾斜角度30°左右,以保證中近車道區域內探測。因激光雷達體積較大,固定底座需平整,避免出現凹凸不平現象,且底座使用鋁合金材質,有助于散熱。
4 結語
在多傳感器融合下,每個傳感器不再是單獨的個體,需要在整體布局下滿足自身的布置要求,才能使感知系統中的每類傳感器發揮出最大能效。同時,面對價格差距較大的各類傳感器,車企需要對智能駕駛功能的定義有清晰的判斷,各類傳感器的性能、運用場景有較好的認識,再結合自身功能需求,才能滿足車企定位要求下高性價比造車。
參考文獻:
[1]王磊.淺談智能駕駛中的環境感知[J].智能網聯汽車,2018(8):27-29.
[2]陳曉東.智能駕駛車載激光雷達關鍵技術與應用算法[J].光電工程,2019,46(7):190182.
[3]陸炳華.智能駕駛汽車傳感器介紹及布置[J].上海汽車,2017(11):40-43.
