應用于傳聲器陣列定位校準的空間點聲源聲場擬合方法
2020-09-15 08:05:42張羽霓王慶慶李永亮
聲學技術 2020年4期
關鍵詞:信號
張羽霓,王慶慶,唐 俊,閆 磊,李永亮
(1. 天津大學建筑工程學院,天津300350;2. 天津大學港口與海洋工程天津市重點實驗室,天津300350;3. 北京航天計量測試技術研究所,北京100076;4. 中國電力科學研究院,北京100192)
0 引 言
控制噪聲源是噪聲治理應用中最有效和最根本的方法。要實現對噪聲源的控制,首先需要確定噪聲源的位置,即噪聲源定位。
傳聲器陣列是指由一定的幾何結構排列而成的若干個傳聲器組成的陣列。基于傳聲器陣列的聲源定位[1]是指用傳聲器陣列拾取聲音信號,通過對多路聲音信號進行分析與處理,在空間域中定出聲源位置。隨著科技發展,對聲陣列定位技術的準確度提出了更高的要求。目前主要通過改進算法和提高聲陣列本身精度等方法對聲陣列定位技術進行突破。然而,這兩種方法在計算定位結果時,由于陣列傳聲器系統中傳聲器個數較多(一般通道數為幾十個到上百個,超大陣列系統甚至可達上千個),分別去校準每個傳聲器的靈敏度和相位并不現實。傳聲器陣列的陣列架加工誤差以及傳聲器在陣列中安裝方式的差異等因素會引起數據采集系統各測量通道間固有的相位差和幅值差。為了降低系統誤差,需要對整個傳聲器陣列系統的定位精度進行校準。李元首等[2-3]通過分析陣列傳聲器采集的數據與品質可靠的標準傳聲器采集數據的差別,處理陣列數據使其與標準數據盡量接近。此方法受環境因素影響較大,實驗結果表明,這種陣列標定方法在無干擾的消聲室中效果良好,但不能應用于工程實際。Oerlemans等[4]提出了利用線性不相干單極子聲源校準陣列聲源定位精度的方法。研究結果是基于聲源遠離陣列基礎上的,即聲源為空間理想點聲源。在實驗時使用一個空間尺寸較小、空間指向性較小的揚聲器模擬點聲源進行校準。由于揚聲器的尺寸不能忽視,這種方法在精度要求較高的情況下,無法滿足各項實驗需求。
針對傳統校準方法存在的問題,本文提出了一種基于自由場點聲源模擬系統的聲陣列成像校準方法。首先提出了一種空間點聲源模擬方法,接著基于該方法設計了一套空間點聲源模擬系統,最后完成了陣列定位位置精度的校準。此方法操作方便、校準精度高、不受環境因素影響,故可應用于工程實踐,滿足高精度需求。
1 點聲源模擬系統
基于球面波聲場傳播模型的多通道點聲源空間聲場合成算法,本文設計了一種空間虛擬聲源。傳聲器陣列定位系統如圖1所示,在坐標系中心,放置直徑為D的傳聲器陣列,每一個傳聲器位置坐標為rm。聲源平面被劃分成N×N的網格點,運用波束成形算法依次掃描每個網格點,獲得坐標rs處的聲源強度。運用此模擬系統可獲得當聲源網格點處有固定頻率、幅值、相位的點聲源時,傳聲器處對應的聲音信號。

圖1 陣列系統示意圖Fig.1 Schematic diagram of the array system
在實際測量中,由于傳聲器陣列與聲源間的距離是一定的,聲源平面上各聲源輻射聲波更接近球面波[5]。陣列各傳聲器接收的聲壓信號不僅存在相位差異,而且存在幅值差異,這些差異與傳聲器和聲源的空間位置密切相關。球面波聲場中傳感器接收信號示意圖如圖2所示。
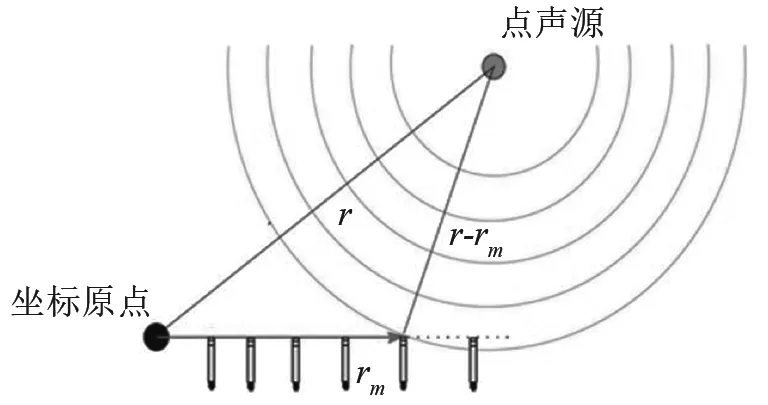
圖2 球面波聲場中傳感器接收信號示意圖Fig.2 Schematic representation of sensor receiving signal in the spherical sound field
虛擬的單極子點聲源位于聲源計算平面上r位置,P0為其聲源信號,沒有反射的自由聲場中格林函數為

其中,k=ω/c為聲波波數,ω為角頻率,c為介質中的聲速;r代表聲源的位置。
則各傳聲器接收的聲壓信號為

其中:P0為虛擬點聲源的聲信號;rm代表傳聲器所在位置。由于點聲源的半徑r0比聲波波長小很多,是一個滿足kr0?1 條件的脈動球源,點聲源聲場輻射聲壓為

其中:ρ0為介質靜態密度;c0為介質中的聲速;h(x,y,z)為點聲源面元到傳聲器所在位置的距離;α(x,y,z)為面元的初相位;為點源強度;ua為點聲源表面振速幅值。
通過式(2)、(3)可計算出空間中存在單極點聲源時,聲場中每個傳聲器所在空間位置的動態聲信號。將計算得到的聲信號通過耦合腔聲源(詳見第 2節)分別傳輸給聲陣列的各個傳聲器,使其接收到的信號與聲場模擬中應該接收到的信號相同,即可完成點聲源的模擬。該方法可以精確模擬不同位置、頻率、幅值、相位的空間聲源。
2 傳聲器陣列定位精度校準裝置
2.1 耦合腔標準聲源設計與標定
本文中所采用的聲陣列耦合腔標準聲源為浙江愛華儀器有限公司定制生產的AWA14424S型聲陣列耦合腔標準聲源(如圖 3所示),其內部結構設計如圖4所示。其中,耦合腔聲源一端安裝了一個活塞式聲發射面板,通過一個耦合腔設計將標準聲源和待校準傳聲器連接在一起。待校準傳聲器從左側插入,使用帶密封圈的緊固螺栓固定,保證耦合腔內是一個封閉的空間,從而組成了一個耦合腔標準聲源,該聲源可按照預設值發出所需的聲信號。

圖3 AWA14424S型耦合腔標準聲源Fig.3 Type-AWA14424S coupling cavity standard sound source
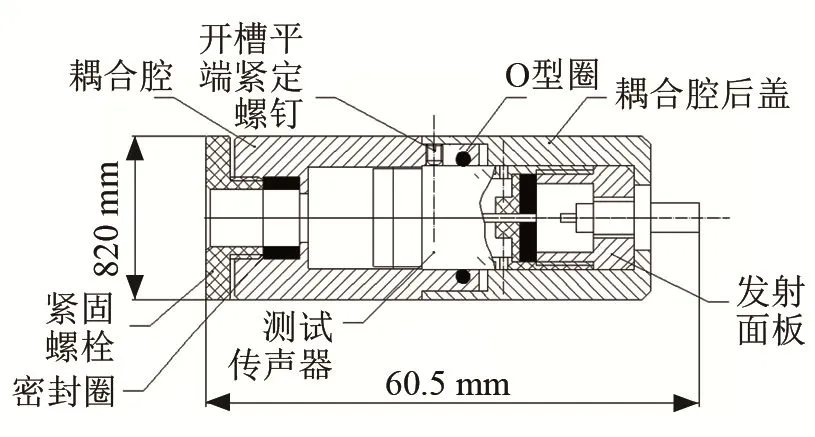
圖4 耦合腔標準聲源結構設計Fig.4 Structure design of the coupling cavity standard sound source
為了使傳聲器陣列聲源定位精度的校準結果更加精準、降低實驗誤差,需要對耦合腔標準聲源進行標定。標定過程如圖5所示。逐一在需標定的耦合腔標準聲源的左側插入同一個已被校準的 B&K 4938傳聲器。記錄各個耦合腔聲源輸出信號的幅值響應,運用互譜分析方法處理不同頻率下的初始聲信號x1(n)和耦合腔聲源輸出的信號x2(n),從而得到耦合腔與標準傳聲器之間的相位差數據。
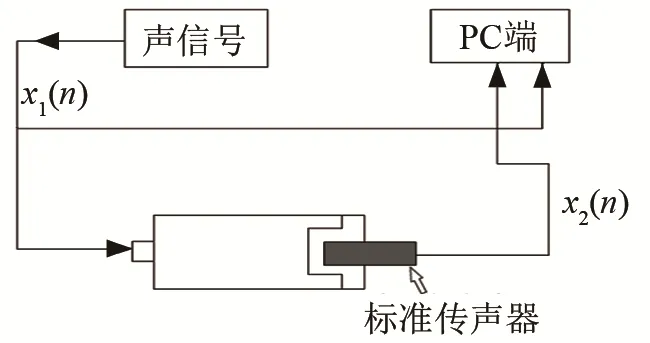
圖5 耦合腔標準聲源標定過程Fig.5 Calibration process of the coupling cavity standard sound source
通過對不同的耦合腔標準聲源的幅值與相位差的一致性進行檢驗與修正,實現對耦合腔聲源的標定。一致性表現較差時,可建立修正數據庫,以此數據庫修正耦合腔的輸出,確保輸出信號的同步性與精度。本文對一個32通道的傳聲器陣列(詳見第3節)進行定位精度校準研究,圖6為對所使用的32個耦合腔幅值與相位差進行歸一化處理后的一致性曲線。可以得出本文中所使用的AWA14424S型耦合腔標準聲源一致性較好。

圖6 32個耦合腔標準聲源幅值與相位一致性Fig.6 The consistency of amplitude and phase of 32 coupling cavity standard sound sources
2.2 傳聲器陣列聲源定位精度校準流程與裝置
具體校準流程分以下幾步:首先利用上面的算法計算出各個傳聲器的動態聲信號;接著利用耦合腔標準聲源將對應的多通道聲壓信號輸入到被校準的聲陣列系統中,完成點聲源的模擬。然后使用被校準聲陣列進行聲源定位計算。最后將模擬點聲源的位置與陣列定位的位置進行比對。傳聲器陣列聲源定位精度校準具體流程圖如圖7所示。

圖7 傳聲器陣列定位精度校準裝置校準流程圖Fig.7 Calibration flow chart of microphone array positioning accuracy
傳聲器校準裝置如圖8所示。信號發射裝備將計算好的動態聲信號傳至對應的耦合腔部件,耦合腔內標準聲源發出對應的聲音。各個傳聲器接收聲音后通過空間多通道聲場合成算法進行定位計算。同時,建立傳聲器陣列精確計量校準和誤差分析系統。
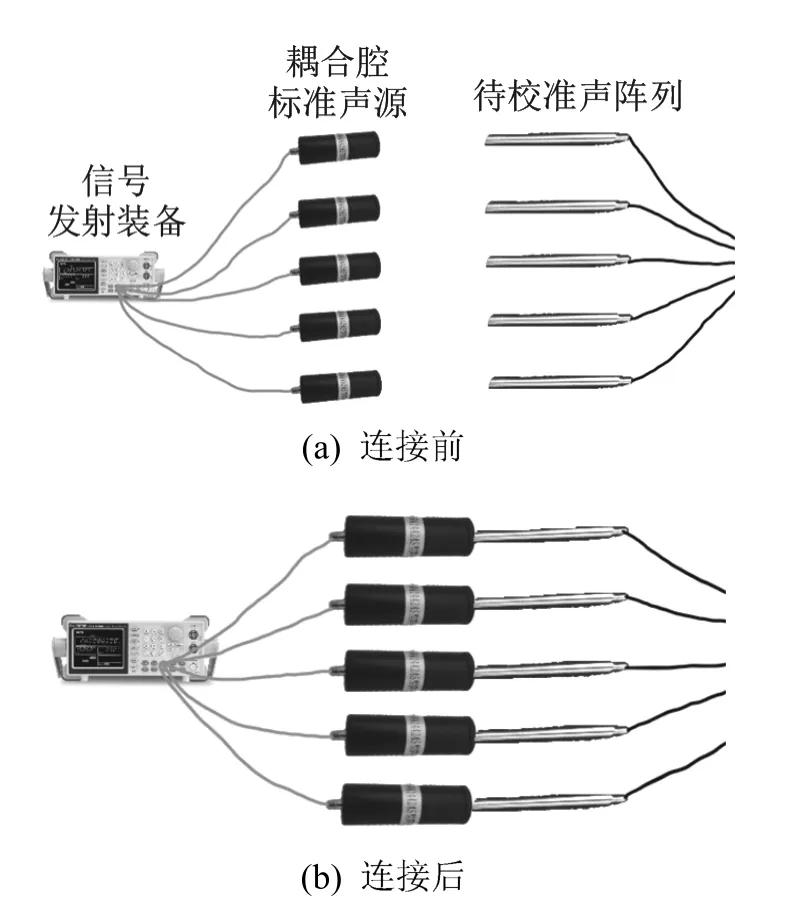
圖8 傳聲器校準裝置原理示意圖Fig.8 Microphone calibration device
3 傳聲器陣列聲源定位精度校準研究
應用前面介紹的傳聲器陣列聲源定位精度校準裝置,本文對一個32通道傳聲器陣列進行了聲源定位精度校準研究。
3.1 傳聲器陣列波束形成聲源定位算法
本文被校準對象為一個 32通道的傳聲器聲陣列,該陣列采用波束形成算法計算聲源位置。波束形成是目前傳聲器聲陣列應用最普遍的一種方法[6-7],在傳聲器陣列技術方面占據著舉足輕重的地位。波束形成法測量速度快、計算效率高,可以進行各種距離的測量,尤其是在中長距離時。無論是穩態聲源還是瞬態聲源,波束形成都具有較高的定位精度[8]。如圖9所示的延時-求和-平方模型是普通波束形成的示意圖。
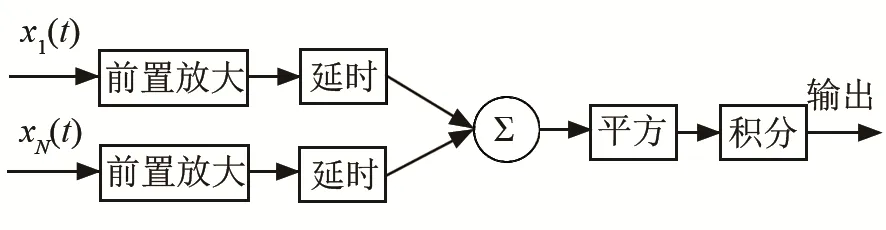
圖9 普通波束形成的方框圖Fig.9 Block diagram of general beamforming
傳統的波束形成中[9]:

其中,向量e(r) ∈ CM×1是位置向量r處的轉向向量。
在單極點源假設下,均質流介質中,記錄轉向矢量的方法為[10]

其中:‖r‖是波束形成器聚焦位置到陣列中心的距離;‖r-rm‖是波束形成聚焦位置到第m個傳聲器的距離(如圖1中所示);f為頻率。
3.2 傳聲器聲陣列系統聲源定位精度校準實驗與結果分析
一般情況下,陣列中使用的單個傳聲器的頻率范圍為 20 Hz~20 kHz,測量的有效聲音信號數據頻率范圍也可達到 20 Hz~20 kHz[11]。然而,整個系統實際可定位的頻帶要小于該范圍。陣列定位系統的低頻主要受限于分辨率。頻率越低,分辨率越差。當頻率過高時,由于空間混疊產生無法分辨的鬼影,陣列的有效動態范圍較小。
本文中被校準的傳聲器聲陣列如圖 10所示,實驗采用美國 PCB傳感器制造公司(PCB Piezotronics Inc.)制造的130E22型駐極體傳聲器(如圖11所示)、浙江愛華儀器有限公司生產的AWA14424S型聲陣列耦合腔標準聲源、32通道的數據輸出卡、32通道的數據采集卡以及PC端測量采集軟件。在精確校準陣列分辨率和動態范圍基礎上,使用點聲源模擬系統精確模擬從低頻到高頻的空間點聲源,從而定量給出陣列的有效頻率響應范圍。

圖10 32通道傳聲器聲陣列實物圖Fig.10 Picture of 32-channel microphone array
圖11 130E22型傳聲器Fig.11 Type-130E22 microphone
實驗模擬了 50~5 000 Hz 的單頻空間點聲源(按照1/3倍頻程),對傳感器陣列進行校準。被校準的32通道傳聲器陣列使用3.1節中所述的波束形成算法,聲壓級設置為 50 dB,通過對比傳聲器陣列定位的位置與模擬點源的位置,校正陣列定位位置的精度。設定模擬聲源的位置分別位于中心點(0, 0)和(0.4, 0.4)。實測點聲源坐標的實驗數據如表1所示。

表1 不同頻率下模擬點聲源坐標對應的實測坐標值Table 1 The measured coordinates corresponding to the coordinates of the simulated point sound source at different frequencies
圖12給出了在200~4 000 Hz不同頻率下,傳聲器陣列定位位置與模擬點聲源在(0, 0)位置處的對比(圖中的黑點為坐標原點,圖中的色棒代表聲壓級的范圍為56.3~56.9 dB)。
由校準實驗結果對比圖可以發現,模擬點聲源位置與聲陣列定位的位置重合度較好。結合實測坐標值進一步得到:當頻率較高(630~4 000 Hz)時,傳聲器陣列定位的坐標值是恒定的,且圖形結果顯示較好,陣列定位位置與模擬點源的位置重合,校準精度高;當頻率較低(200~500 Hz)時,傳聲器陣列定位的坐標值有小幅波動,但波動小于0.02 m,同時圖形結果顯示較差,在軟件中調小動態范圍,圖形全部顯示后,兩個位置也是重合的。實驗結果表明,被校準的32通道傳聲器陣列的有效頻率響應范圍為200~4 000 Hz。這說明本文提出的基于自由場點聲源模擬系統的傳感器陣列成像校準方法對聲陣列的校準精度較高。
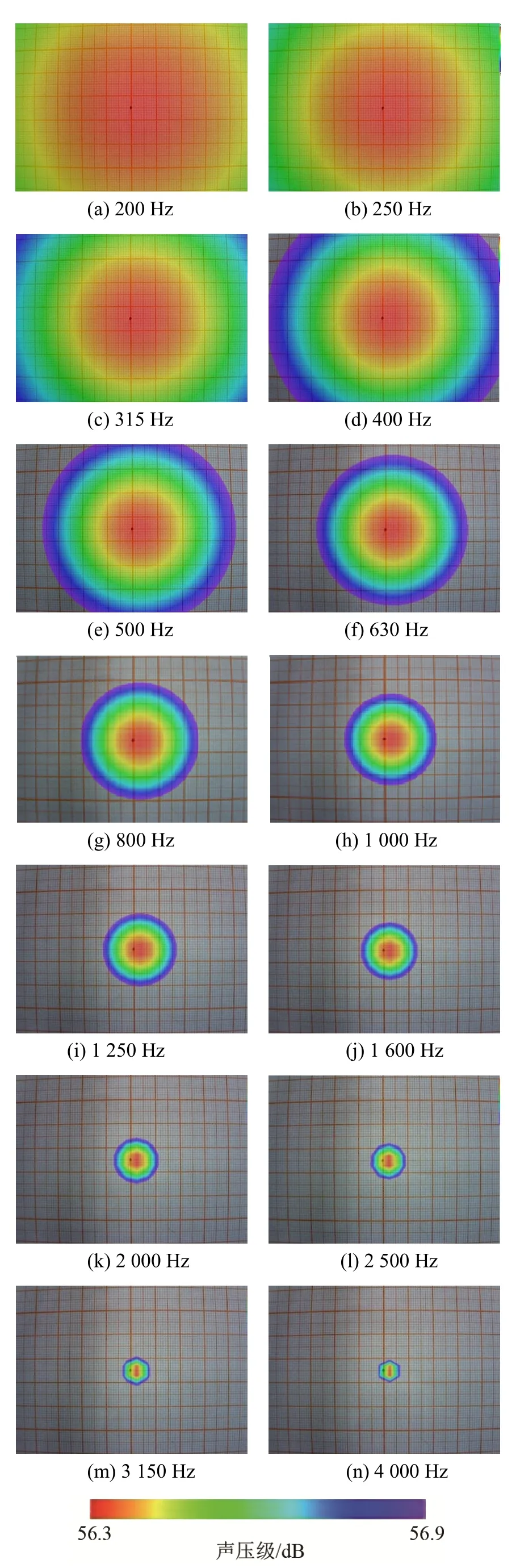
圖12 對200~4 000 Hz單頻點聲源的傳聲器陣列定位聲圖像Fig.12 Acoustic images of microphone array positioning for 200~4 000 Hz signal frequency point sources
4 結 論
本文介紹了一種基于多通道標準聲源的空間點聲源聲場模擬方法,并利用此方法設計了一套空間點聲源模擬系統。本文設計了一個無空間指向性、空間尺寸極其小的點聲源,精確地模擬了從低頻到高頻的空間點聲源,定量給出了陣列的有效頻率響應范圍,實現了對傳聲器陣列系統定位準確性的校準,為傳聲器陣列系統聲源定位精度校準的研究提出了一個新的思路與方式。
實驗模擬了50~5 000 Hz頻率下的空間點聲源對聲陣列進行校準,被校準的32通道傳聲器陣列采用波束形成算法,對比傳聲器陣列定位的位置與模擬點源的位置。結合 200~4 000 Hz點聲源位置與傳聲器陣列定位位置對比圖,實驗結果表明本文提出的基于自由場點聲源模擬系統的傳感器陣列成像校準方法對傳聲器陣列的校準精度較高。該方法操作簡單,定位精度高,不受環境因素的影響,可以方便地校準傳聲器陣列系統定位精度。因此,本文提出的基于多通道標準聲源的空間點源聲場模擬方法能夠滿足各種實驗要求,具有工程應用意義。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06