基于DSM 自動提取建筑物輪廓線的研究
2020-09-22 11:12:32李小紅
經緯天地 2020年4期
關鍵詞:利用
李小紅
(山西省測繪地理信息院第一測繪院,山西 太原 030002)
0.引言
隨著城市的快速發展,能快速、高精度地提取建筑物的基本情況,對城市規劃和建設有極其重要的意義,對航空攝影測量產品的快速更新和地理國情數據建庫的更新以及對三維建模也有非常重要的意義。1∶10000DLG 房屋層生成現有的方法有三種:(1) 利用符合時相的大比例矢量圖縮編,此方法作業效率高,但可利用的大比例尺矢量數據成果較少;(2)利用航空影像立體測圖,勞動強度大,作業成本高;(3)利用正射影像提取建筑物輪廓線,在城區樓層較高區域建筑物投影差較大,精度不能保證,還有部分建筑物被遮擋及陰影等很多因素干擾, 從高分辨率衛星影像和航空影像中提取建筑物輪廓會有好多被遮擋的建筑物的輪廓提不到的情況。
LiDAR(Light Detection And Ranging)是激光探測及測距系統的簡稱。LiDAR 系統是一種利用機載激光掃描(Airborne Laser Scanning,ALS)技術快速采集地表點的攝影測量裝置,可自動生成精確的數字表面模型 DSM(Digital Surface Model)。ADS100 是徠卡公司的一款采用線陣CCD 推掃式數字成像技術,集成了全球衛星定位系統(GPS)和高精度慣性測量系統(IMU),其成果可以直接用于測繪生產作業,最大限度地減少了外業控制測量工作,提高了攝影測量的工作效率和成果質量。
像素工廠與傳統的攝影測量軟件相比較, 其中一個優勢就是高效自動大面積計算數字表面模型(DSM)。超高精度數字地面模型柵格大小能達到0.04m的空間DSM(依賴原始影像分辨率),在計算獲得的高程影像上噪聲通常比較少,適用于光學衛星、雷達衛星以及航拍影像,不同于傳統的基于相關算法的技術,做完空三之后,像素工廠生成立體相對,根據前后視及下視的多重相關,在并行節點上快速生成高分辨率的DSM。DAS100 航攝儀可以獲取高分辨率的影像,利用像素工廠生產高精度的DSM。
近年來,很多學者對利用點云數據提取建筑物輪廓進行了大量的研究。如武漢大學的李必軍等提出的利用建筑物的幾何特征,從激光掃描數據中進行建筑物特征提取研究;南京大學的程亮等提出在LiDAR 輔助下利用超高分辨率影像提取建筑物輪廓方法等。利用機載激光雷達獲取的點云數據或航空攝影測量處理計算生成的DSM 數據包括了地形和地貌的三維數據,本文提出了通過DSM 數據提取建筑物的輪廓線的方法。
1.原理和方法
因為DSM 是在DEM 的基礎上包括了建筑物、構筑物、樹木、植被等要素,所以要提取建筑物的輪廓等信息,就需要首先提取出地物信息,通過機載激光雷達或航空攝影測量獲取的LAS 格式的DSM,對DSM 進行濾波處理生成DEM,利用DSM 與DEM 的差值模型影像,再根據建筑物幾何形狀基本規則,折角一般接近直角,面積比較大,房頂高程基本一致等特性。根據高程閾值和面積閾值從地物中過濾掉植被等其他地物點,生成建筑物輪廓線,將輪廓線轉點,通過房子的一些特征,平行、垂直進行建筑物輪廓線細化。流程(如圖1 所示):
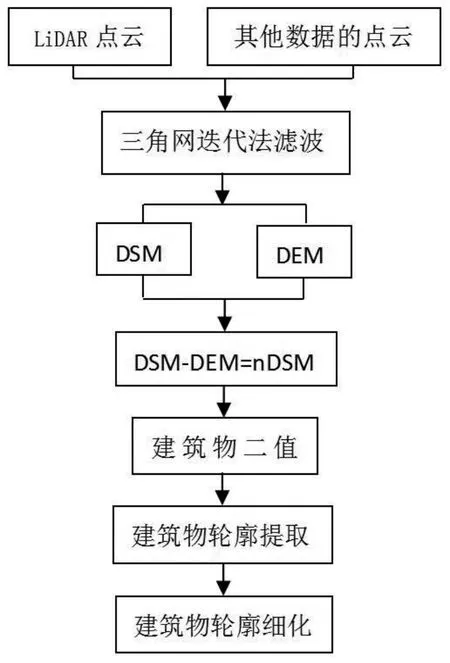
圖1 技術流程
1.1 數據預處理
比周圍點的平均高程明顯高的點為空中點,這些點通常是噪點,低點通常指的是一個或一組比周圍點明顯低的點,一般在地面點分類之前需進行低點分類,而且需要分類多次才能全部找到低于地面的錯誤點。需要去除錯誤點和激光掃描儀的系統誤差可能造成不必要的高位或低位的粗差點云。首先,利用濾波軟件剔除這些粗差點云。剔除DSM 中的壞值,即極高、極低粗差點。然后,基于地形坡度學的分類方法,該方法根據假設法,假設兩個相鄰的點的高差不可能由地形陡坡引起,這些高程點更可能是非地面點,兩點的高差隨著兩點距離縮小,較高的點為地面點的可能性降低。通過迭代法建立三角網的方式過濾地面點,例如假設max building size = 70m,它則是假設在一個70m×70m 的區域內,至少有一個點為地面點。通過該方法找出一些初始的地面點構成三角網,再根據限制的條件(地形的角度、迭代角的大小、迭代距離),不斷地向三角網中加入LAS 點進行迭代,進一步細化三角網,最終得到的三角網頂點則為地面點。根據地形類別的不同,選擇不同的參數,一般城市地區,Max building size 要設大點,在山區或農村,Max building size 要設小點。通過濾波后剩下的非地面點中還包含房屋、車輛、樹木、花草等地物。
1.2 生成 nDSM
由于地形的高低起伏太大會給提取建筑物輪廓帶來麻煩,灰度值較大的區域不一定是高建筑物,可能是其所在的地形較高。同時,地形的起伏會給建筑物輪廓的提取算法增加了干擾,容易引起錯誤。因此,我們必須首先消除DSM 地形因子,提取數字地面模型(DEM),然后獲得規格化后的DSM(即nDSM),然后開始構建提取。由于機載激光雷達或者航空攝影測量獲取的DSM 包括了地形和地貌,要提取建筑物的信息,建筑物屬于地物,首先要去掉地貌,用DSM 和DEM 做差值計算,生成地物影像。
1.3 建筑物影像分割
利用邊緣分割的算法,對地物影像進行分隔,這種算法計算很快,通過不同閾值控制,從而產生從粗到細的分隔。選擇高的閾值將會分隔出很少塊,選擇低的閾值將會分出很多塊,要選擇合理的閾值進行分隔,盡量分隔出好的邊界。地物影像除了建筑物,還有植被、圍墻、道路等地物。利用建筑物比較高、面積比較大、屋頂高程一致的特性,提取建筑物影像。
(1)根據建筑物高度一般都高于3m,所以高程閾值h 設為3m,這時候把低矮植被、汽車等過濾掉,從地物影像里提取h>3m 的地物影像;余下的地物影像主要包括高植被和建筑物。
(2)檢測、標記并計算連通地物影像的面積。
(3)根據建筑物的面積一般都大于6×6m2,設面積閾值S>36m2,可以過濾掉孤立的高植被、電線桿、路燈等地物。
(4)利用第三步提取的地物影像,生成二值圖像,如式(1):

式(1)p(xi,yj)表示點(xi,yj)高程值,一幅二值圖像按照從左到右、從上到下的順序搜索,找到的第一個g(x,y)=1 的點作為種子點, 將種子點的8 鄰域范圍內的高度與種子點的高度做差值,得出它與其連通地物影像每個像元的高差值Δhi,若所有的Δhi<0.5m,則該連通區域為建筑物。
(5)剩下的建筑物面邊緣雜亂,面中仍存在由數據處理中產生的小面積數據空白,建筑物面還存在不規則缺口和凸出塊的情況,為了處理小面積的空白和不規則的缺口和凸出塊,利用數學形態學中的閉運算操作,閉運算的原理是先膨脹后腐蝕的聯合運算,閉運算第一步需要先估算出空白數據的最大面積,然后用該面積除以單元格網的面積,取整數之后可得數學形態學閉運算需要窗口B 的大小。數學形態學閉運算可以填充比窗口B 小的缺口、孔洞和連同小間隔的間斷以及平滑邊界的功能,閉運算可以部分彌補建筑物面域的空洞。閉運算是利用結構元素B 對初始提取的建筑物面A 進行膨脹,然后接著再進行一次腐蝕的結果,其公式如式(2):

式(2)中,A 為提取的建筑物面的集合;B 為窗口大小;·為閉運算;為膨脹運算;θ 為腐蝕運算。
1.4 建筑物輪廓提取及規則化
根據建筑物影像是二值圖,利用ArcGIS 矢量化建筑物邊線,先建一個面矢量文件和一個線矢量文件,設置坐標系與影像坐標系一致,開始編輯線矢量,在菜單欄上點擊“自定義”下的“工具條”,勾選上ArcScan 工具條,在ArcScan 工具條上點擊“矢量化”,選擇矢量化設置,在彈出的“矢量化設置”設置樣式為“輪廓”, 在ArcScan 工具條上點擊“矢量化”,選 “生成要素”,按照默認設置生成建筑物矢量。生成的建筑物輪廓線有好多條線段組成。根據實際情況建筑物的邊數不會太多,建筑屋頂輪廓線存在平行、直角等特點,需要規則化建筑屋頂邊線,修整過程包含兩步:(1)對所得結果中近似平行的一些直線進行合并。(2)根據建筑物一般形狀是規則的幾何形狀,折角接近直角,把相交線正交化。
2.實驗結果及分析
2.1 實驗數據
本文使用一種格網間距為0.2m-0.3m 的LiDAR點云數據和一種地面分辨率優于0.2mADS100 航空影像數據。兩種數據是使用不同機載設備、采集相同區域得到的不同密度的點云數據。選取的該試驗區覆蓋面積約為6.7km2,且地勢比較平坦,適合于采用本文的方法進行實驗。LiDAR 點云數據的密度是每平方米16點, ADS100 航空攝影數據處理獲取的分辨率為0.4m的DSM 及LAS 格式的點密度是每平方米2.5 點。
2.2 實驗結果
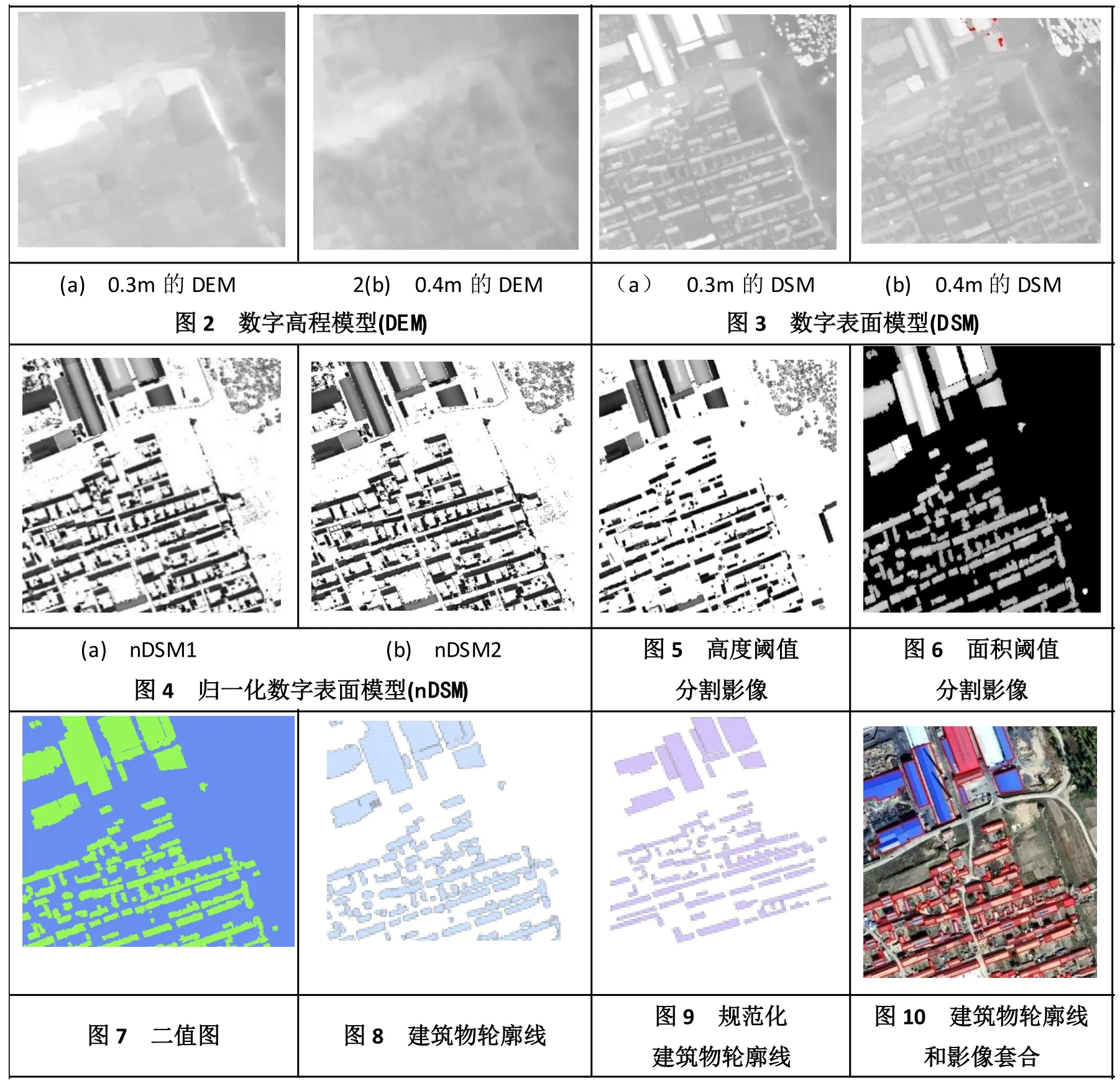
首先將像素工廠生成的分辨率為0.4m 的DSM 數據轉換成LAS 格式,基于TerraScan 軟件剔除粗差點(及LAS 中的極低點和極高點);然后,采用三角網迭代濾波法區分出地面點和非地面點,利用二次樣條函數法從分離出來的地面點層內插生成的格網間距為0.3m 和 0.4m 的 DEM,(如圖 2 所示);也利用二次樣條函數法將濾除低點的LAS 點內插生成的格網間距為0.3m 和 0.4m 的 DSM,(如圖 3 所示)。從圖 3(a)和 3(b)中可以看出建筑物比較多,除了建筑物還有圍墻、車輛和植被等地物。再利用DSM1 減去DEM1 得到差值影像nDSM1(如圖 4(a)所示);利用 DSM2 減去 DEM2 得到差值影像nDSM2(如圖4(b)所示)。根據建筑物高度一般都高于3m,所以高程閾值h 設為3m,這時候把低矮植被、汽車等過濾掉, 從地物影像里提取h>3m 的地物影像;余下的地物影像主要包括高植被和建筑物,(如圖5 所示)。圖6 為采用面積閾值獲得,去掉低矮植物、圍墻、獨立樹的地物影像圖。圖7 為根據初步的建筑物影像圖生成二值圖,黑色值0 為非建筑物,白色值1 為建筑物。圖8 為提取的建筑物輪廓線。圖9 為對平行線近似合并及對建筑物線進行正交化處理的結果。
2.3 結果分析
為了分析提取建筑物輪廓線的精度,采用了兩種方法,一種方法是通過建立立體相對,利用ERDAS 軟件里的測圖模塊(LPS)采集建筑物矢量,將自動提取的建筑物邊界線和立體采集建筑物矢量進行套合,結果顯示兩套矢量數據基本套合;另一種方法是利用提取的建筑物輪廓線和正射影像進行套合,結果顯示也基本套合(如圖10 所示)。但是,由于高度閾值、面積閾值設置過大會出現個別漏提和高度閾值、面積閾值設置過小多提的情況。
3.結束語
本文提出了從激光雷達或從ADS 數據獲取的LAS 格式的數據,通過濾波分離出地面點和非地面點,做差值影像,分離出非地面點,通過高度閾值、面積閾值和建筑物頂接近平行,分割出建筑物,自動提取建筑物的粗略邊線并進行細化得到建筑物邊界線,能夠滿足1∶10000 DLG 生產的需要。
本文的方法仍然存在一些不足,實驗中發現了分割建筑物時,有少數建筑物和鄰近非建筑物分割成同一個建筑物面的情況,所以建筑物規則化處理算法有待更好地解決。今后將進一步對利用LAS 數據結合正射影像提取建筑物輪廓線的方法和基于分類法從真正射影像中提取建筑物輪廓線的方法進行研究。
猜你喜歡
中等數學(2022年2期)2022-06-05 07:10:50
中學生數理化·七年級數學人教版(2021年11期)2021-12-06 05:38:48
中學生數理化(高中版.高考數學)(2021年6期)2021-07-28 06:19:08
小學生學習指導(低年級)(2020年6期)2020-07-25 02:31:36
小學生學習指導(低年級)(2019年11期)2019-11-25 07:31:44
小學生學習指導(低年級)(2018年9期)2018-09-26 05:59:44
瘋狂英語·新讀寫(2018年2期)2018-09-07 09:32:10
數學小靈通·3-4年級(2017年6期)2017-06-22 11:28:50
工業設計(2016年5期)2016-05-04 04:00:33
河北遙感(2015年4期)2015-07-18 11:05:06