無人機傾斜攝影測量在1∶500 地形圖測繪中的應用
2020-09-22 11:12:34戴金榮
經緯天地 2020年4期
戴金榮
(龍巖市勘察測繪大隊,福建 龍巖 364000)
0.引言
無人機傾斜攝影測量作為一門新科學技術,在城市規劃、日照分析、地質沉陷監測、精準測量等領域得到廣泛應用[1,2]。無人機傾斜攝影測量具有操作簡單、節約人工、精度高等優點,目前具有極廣的市場應用價值[3,4]。
周呂等[5]重點研究某體育館建筑,借助Context Capture 分析無人機影像從而構建體育館模型,三維各向誤差在3cm 以內;錢琛等[6]將無人機低空傾斜攝影應用于新農村建設,并提出優化技術應用途徑;牛井義[7]將無人機三維傾斜攝影應用于礦山監測,有效提升了礦山測繪精準性和成圖速度;齊昌洋[8]在竣工規劃測量中引入了無人機傾斜攝影測量技術,為工程竣工驗收提供依據。
本文以龍巖市紅坊片區為研究區域,進行無人機傾斜攝影測量,并總結了該項技術的特點及操作過程。最終得到全要素1∶500 數字線劃地形圖,為區域規劃提供依據。
1.無人機傾斜攝影系統
無人機傾斜攝影系統中,無人機型號為大疆經緯600Pro 無人機,搭載的傾斜攝影相機品牌為雙魚,適用于大面積塊狀、帶狀等測量區域。該系統除了無人機和搭載相機外,還有成熟的控制模塊。該系統成本較低、操作難度低、精準度和影像分辨率高,在傾斜攝影測量與快速三維建模中具有顯著的優勢。
1.1 飛行平臺及傾斜攝影平臺
無人機傾斜攝影系統多用于低空攝影測量,可實現厘米級導航定位和高清成像,同時具有便于外出攜帶的特點。無人機傾斜三維攝影平臺,適用于無人機進行地形圖測量工作,影像分辨率最高可達1.5cm。
1.2 自動建模軟件
三維建模軟件采用的是ContextCapture Master 自動建模系統,該系統是一種快速三維場景運算軟件,整個過程只需簡單的人工干預,人工給予一定數量的控制點,便能基于連續影像自動生成三維實景模型,模型成果采用OSGB 數據格式,采用多達12 層的分層顯示技術(LOD),以保證地物模型及建筑物細部特征清晰顯示,自動建模技術整體架構。(如圖1 所示):

圖1 自動建模技術整體架構圖
1.3 三維測圖軟件
三維測圖軟件使用航天遠景的MapMatrix 5.0 平臺下的傾斜測圖模塊,在高精度三維模型的基礎上采集二維矢量信息。該平臺可實現接入航天遠景、JX4 航測一體化采編及信息化測繪入庫,是采編一體化的測量系統。三維測圖界面圖(如圖2 所示):

圖2 三維測圖界面圖
1.4 其他輔助軟硬件
GNSS 接收機、手持式激光測距儀、數字水準儀、全站儀、計算機、數字測圖軟件。
2.研究區分區及空中三角測量和模型建立
2.1 研究區概況
研究區位于龍巖市新羅區西南,呈不規則形狀,東西長約2.45km,南北寬約5.27km,測圖面積為5.5km2。研究區中心地處北緯25°03′,東經116°59′,涉及田心村、上洋村、進貝村、龍溪邦村、東埔村等村莊。居民地較密集,房屋以3 層左右為主,給測量帶來了很大困難,研究區困難類別為Ⅱ類區。研究區區域范圍示意圖。(如圖3 所示):
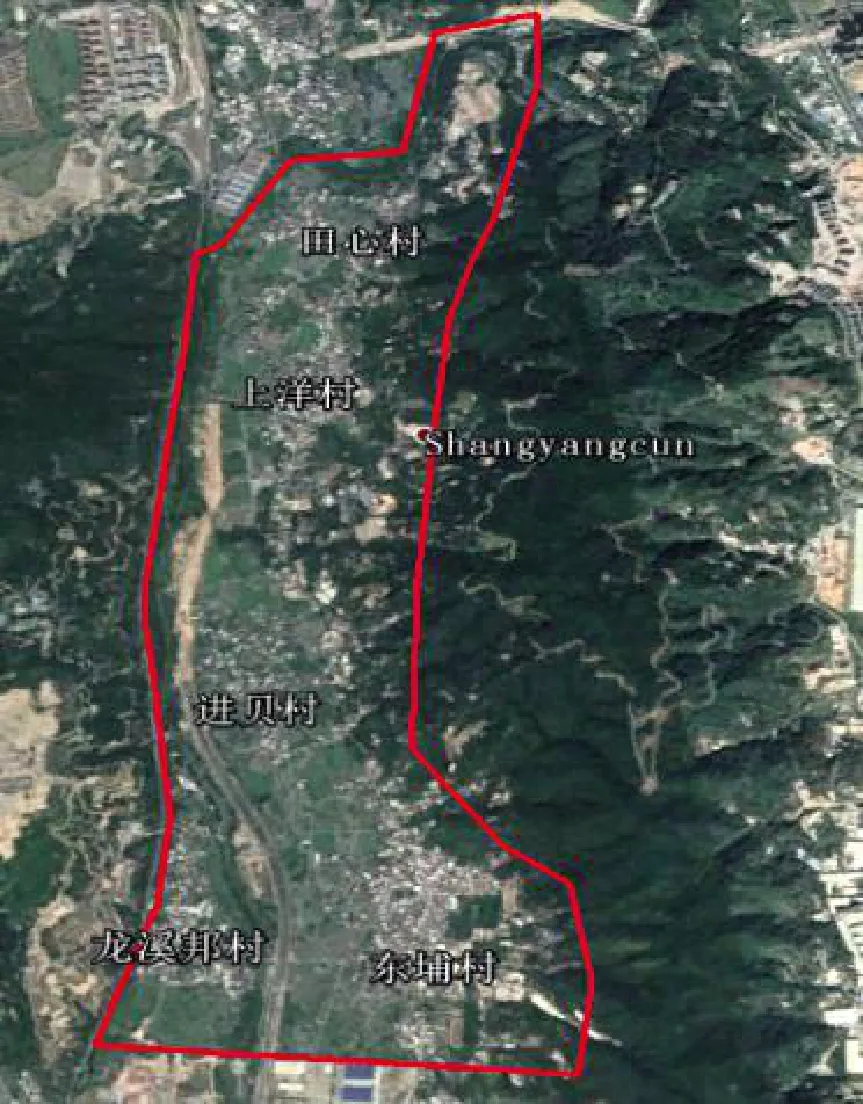
圖3 研究區區域范圍示意圖
2.2 攝影分區與航高設定
研究區海拔最低處348m,最高535m,高低落差約200m,且研究區為大面積面狀區域,呈南北走向趨勢,主要施測對象為范圍內的地物、地貌。由于無人機攝影測量需在攝區范圍上空執行往復航線,考慮到單架次航線長度受無人機電池續航及安全控制距離的影響,以及為了保障三維圖像成像的質量,采用結合分區的地形條件,測圖等高距,考慮基高比,綜合考慮效果、效率、成本等因素,最終按照單條航線距離1km-2km 將航線分為以下4 區塊:區塊1 為房屋密集區,區塊2 與區塊3 為房屋田地結合區;區塊4 為高程落差較大的山邊區域,。本項目地面分辨率為1.6cm,無人機航攝高度為120m,最終地面分辨率均優于規范要求的5cm。研究區攝影分區示意圖(如圖4 所示):

圖4 研究區攝影分區示意圖
2.3 航線設計
航線按大面積無人機往復航線敷設,根據所提供的紅線范圍,并利用緩沖區工具對所繪制的范圍線進行150m 范圍外擴,保證研究區最邊緣地物采集完整,建模時沒有破洞。最終形成“紅坊航飛范圍.KML”文件,作為飛控引導文件。本項目總計飛行18 架次航線,總條數108 條,總航程175.5Km。其中主線按東西向布設,構架線按南北向布設。四處攝影分區的航線圖分別(如圖 5、圖 6、圖 7、圖 8 所示):
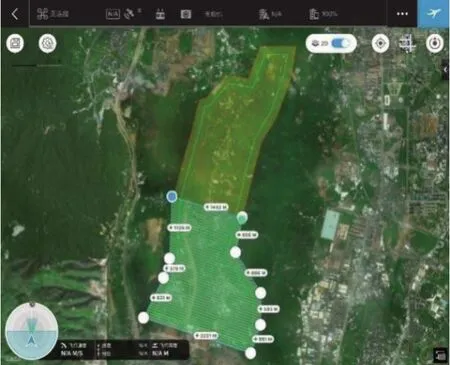
圖5 分區1 航線設計圖

圖6 分區2 航線設計圖

圖7 分區3 航線設計圖
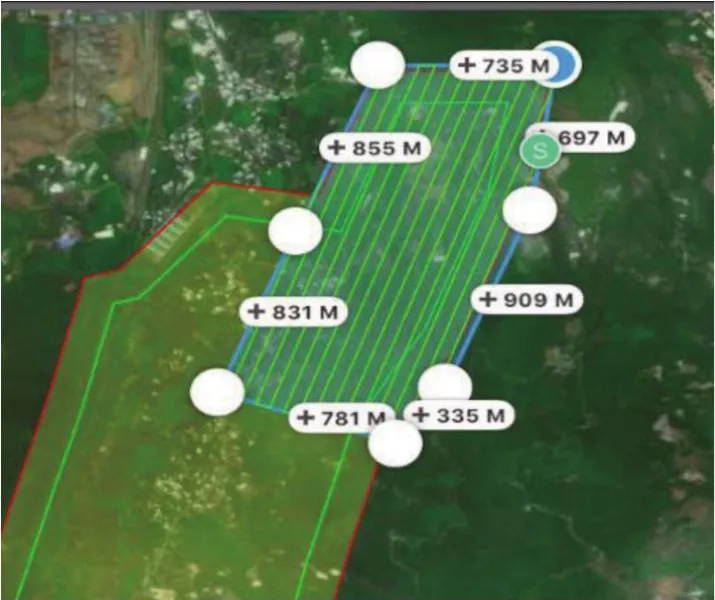
圖8 分區4 航線設計圖
為保證航攝光線,將航攝時間定為正午前后兩小時。主航線航向、旁向重疊率皆為75%,航向、旁向覆蓋均超出攝區邊界線150m。
2.4 像片控制測量
控制點的標志點,在水泥道路紅色油漆畫邊長為40cm、寬度為 20cm 的L 字形標志(如圖9 所示):

圖9 像片控制點
2.5 空中三角測量及三維實景模型建立
自動建模系統中空三計算是通過光束法區域網整體平差方法自動完成,完成空三解算,選取坐標系,導入相應的像控點,并完成刺點。本次共獲取有效像片27640 張,像控點共71 個,采用710 張數字像片進行刺點,刺點位置是L 字內交叉的中心,刺點完成后,再進行絕對定向。定向完后,進行模型建立,并最終選擇模型坐標系、范圍及分塊尺寸,通過自動建模系統生成三維實景模型。(如圖10 所示),本次求得空三精度平面最大誤差0.02m,高程最大誤差0.02m,均在規定的限差內。

圖10 三維實景模型
3.后期處理及成果精度
3.1 內業制圖
居民地、工礦建筑、道路設施、管線設施、水系設施、水稻田等地形地貌測繪采用三維測圖模塊,以生成的三維實景模型為基礎,先內業后外業的作業方法,內業按立體模型定位,外業實地定性, 對能夠準確判讀的地物、地貌要素,均全部采集,影像不清晰、要素部確定而無法采集時,用特殊符號標記,并進行實地補測。生成滿足1∶500 數字線劃圖規范要求的地形圖。
3.2 數字線劃圖調繪與修補測
通過裸眼采編內業三維測圖時,由于房屋、屋檐、門檐、樹木等遮擋導致生成的三維實景模型局部變形,三維測圖無法或不能準確采集這些要素點,還有少部分不明顯特征點需要進行補測,電桿等之間的連線要外業調查得出。所以還需對少部分不明顯特征點采用全站儀設站進行補測、利用手持式激光測距儀或鋼尺按交會法進行補量。
3.3 調繪成果
通過無人機傾斜攝影測量,得到全要素1∶500 數字線劃地形圖(如圖11 所示):

圖11 全要素1∶500 數字線劃地形圖
3.4 現場采集點與模型平面和高程精度比對
本測區采用全站儀設站在地物點相對鄰近圖根點設站實地采集方式,采集一定比例且在測區內分布均勻的建、構筑物等明顯地物點平面位置,及道路、農田高程、水泥坪等地形高程,本次共采集平面位置點330個、高程點210 個,通過與模型進行平面和高程精度比對,驗證模型質量精度。詳細精度分析(如表1、表2 所示):

表1 現場采集點與模型平面點精度比對

表2 現場采集點與模型高程點精度比對
通過上表可以得出,地物點相對于鄰近控制點的平面點位中誤差和高程中誤差均優于規范要求的指標,因此采用無人機傾斜攝影測量能滿足《城市測量規范》規定。
4.結束語
(1)本文介紹了無人機傾斜攝影測量系統的組成,對儀器設備、自動建模及三維測圖軟件進行了詳細介紹,為無人機傾斜攝影測量系統的構建提供參考。
(2)通過結合實例,對無人機傾斜攝影測量的應用進一步展開研究,實踐表明新工藝對測量技術的支持與提升有很大的促進作用。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03