乘用車在不同車身高度下的平順性分析
2020-09-23 08:45:04王金平李殿起王殿鈞郭君娥
機(jī)械工程師 2020年9期
王金平, 李殿起, 王殿鈞, 郭君娥
(沈陽工業(yè)大學(xué) 機(jī)械工程學(xué)院,沈陽110870)
0 引 言
人們對(duì)汽車的乘坐舒適性要求越來越高,汽車平順性是影響汽車乘坐舒適性的主要因素,但影響平順性的原因有很多。因此汽車平順性的研究具有重要的價(jià)值。各種激勵(lì)會(huì)刺激行駛過程中的車輛,汽車因這些激勵(lì)而產(chǎn)生振動(dòng),影響乘員的乘坐舒適性,并且使車輛的大部分零部件疲勞損傷,車輛的使用壽命因此縮短。另外,車輛的操縱穩(wěn)定性會(huì)因車輛振動(dòng)產(chǎn)生的輪胎動(dòng)載荷受到影響,降低了車輛的安全性,限制了車輛的動(dòng)力性,且路面也會(huì)在部分振動(dòng)情況嚴(yán)重時(shí)遭到破壞[1]。
外國學(xué)者做過人對(duì)不同頻率振動(dòng)反應(yīng)的試驗(yàn),讓人坐在椅子上,先給一個(gè)強(qiáng)度不是很大的振動(dòng),頻率由低到高,緩慢變化。結(jié)果發(fā)現(xiàn),振動(dòng)頻率小于1 Hz時(shí),人感到頭顱內(nèi)振動(dòng),持續(xù)幾分鐘以后,會(huì)產(chǎn)生肌肉疼痛的感覺;頻率為2 Hz時(shí),人感到困乏、愛打瞌睡;5~8 Hz時(shí),感到難以忍受,并且呼吸和講話都受到干擾;9~30 Hz時(shí),人會(huì)感到臉頰、頸部振動(dòng),視覺受到干擾;振動(dòng)頻率超過30 Hz時(shí),人雙手操作駕駛受到嚴(yán)重影響。汽車在駕駛過程中,路途顛震與發(fā)動(dòng)機(jī)的震顫,致使司機(jī)和乘員長期處于全身振動(dòng)狀態(tài),雖然振動(dòng)的傷害對(duì)人體的損傷很小,但是這種損傷正如滴水穿石的積累,最終會(huì)對(duì)人體健康造成嚴(yán)重的損害。因此汽車平順性的研究具有重要的價(jià)值。
J.A. Peterson[2]主動(dòng)懸架系統(tǒng)中增加自適應(yīng)阻尼,提升了車輛的行駛平順性和操縱穩(wěn)定性。Kazemeini[3]建立了1/4車輛空氣懸架模型,設(shè)計(jì)了全主動(dòng)控制器和相應(yīng)的試驗(yàn)臺(tái)架,仿真和試驗(yàn)的結(jié)果均表明控制器能有效地降低車身的加速度和輪胎動(dòng)載荷,提高了汽車平順性。Selim Solmaz等[4]研究了安裝輪轂電動(dòng)機(jī)引起的簧下質(zhì)量增加對(duì)車輛行駛平順性的影響,并提出通過改進(jìn)懸架及輪胎參數(shù)來抵消簧下質(zhì)量增加引起的負(fù)面效應(yīng)。對(duì)行駛平順性的分析和評(píng)價(jià)方法的研究,國內(nèi)學(xué)者要略晚于國外。但國內(nèi)學(xué)者通過借鑒和吸收國外對(duì)平順性的研究經(jīng)驗(yàn),也得到重要的研究成果。弓馨等[5]利用參數(shù)敏感度理論,分析輪胎剛度、懸架橡膠件垂向剛度、懸架彈簧剛度和座椅剛度對(duì)座椅和地板的垂直加速度均方根值的影響。張志飛等[6]針對(duì)商用車的平順性與道路友好性協(xié)調(diào)問題,采用遺傳算法優(yōu)化懸架剛度和阻尼系數(shù)。
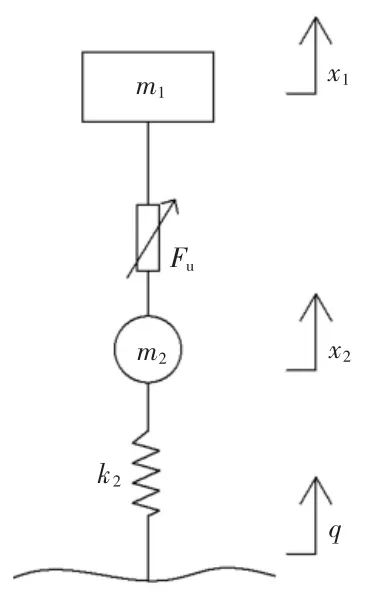
圖1 車輛全主動(dòng)懸架振動(dòng)簡化模型
1 全主動(dòng)懸架振動(dòng)簡化模型
1/4車輛半主動(dòng)懸架振動(dòng)簡化模型如圖1所示。
由圖1可得,1/4車輛全主動(dòng)懸架振動(dòng)簡化模型的運(yùn)動(dòng)學(xué)微分方程為:




2 不同車高對(duì)平順性的影響
部分限制條件的白噪聲可用作路面激勵(lì)的隨機(jī)波動(dòng),以濾波器完成對(duì)它的一定轉(zhuǎn)換,具有特定譜特征的隨機(jī)過程可由空間功率譜密度與時(shí)間功率譜密度聯(lián)合推導(dǎo)出,故路面不平度位移的時(shí)域表達(dá)式為

隨機(jī)路面的模型在軟件Simulink中的搭建如圖2所示。

圖2 隨機(jī)路面輸入模型
根據(jù)空氣懸架系統(tǒng)振動(dòng)模型、隨機(jī)路面模型及全主動(dòng)懸架的低位、中位和高位模型,在Matlab/Simulink中搭建的車身垂直加速度的仿真模型如圖3所示。此仿真模型以車身3個(gè)高度模式的車高,得出車身垂直加速度的變化,進(jìn)而得出空氣懸架的高度調(diào)節(jié)對(duì)乘用車平順性的影響。

圖3 全主動(dòng)懸架在不同車高下的仿真模型
當(dāng)車速分別為30 km/h、50 km/h,路面等級(jí)分別為A、C時(shí)的車身垂直加速度仿真結(jié)果如圖4~圖7所示,表1和表2所示為車身垂直加速度均方根值的計(jì)算結(jié)果。

圖4 車速30 km/h 時(shí)A 級(jí)路面車身垂直加速度仿真圖

圖5 車速30 km/h時(shí)C級(jí)路面車身垂直加速度仿真圖

圖6 車速50 km/h時(shí)A級(jí)路面車身垂直加速度仿真圖

圖7 車速50 km/h時(shí)C級(jí)路面車身垂直加速度仿真圖

表1 車速30 km/h在A級(jí)和C級(jí)路面車身垂直加速度均方根值
3 結(jié)論
由仿真結(jié)果可以看出,相同車速下,全主動(dòng)懸架在低位、中位和高位處車身垂直加速度均方根值逐漸增大,即車輛的行駛平順性變差;相同路況下,全主動(dòng)懸架在低位、中位和高位處車身垂直加速度均方根值逐漸增大,即車輛的行駛平順性變差;車身位置變化對(duì)平順性的影響大于車速和路況變化對(duì)平順性影響。

表2 車速50 km/h在A級(jí)和C級(jí)路面車身垂直加速度均方根值
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:36:28
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中國公路(2017年18期)2018-01-23 03:00:38
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
