針對(duì)彎道場(chǎng)景的角毫米雷達(dá)數(shù)據(jù)處理研究
2020-09-26 09:43:01何佳郭蓬唐風(fēng)敏張正奇夏顯召
汽車(chē)實(shí)用技術(shù) 2020年17期
何佳 郭蓬 唐風(fēng)敏 張正奇 夏顯召
摘 要:車(chē)輛盲區(qū)監(jiān)測(cè)系統(tǒng)作為輔助駕駛員視角的系統(tǒng),對(duì)減少駕駛員觀測(cè)盲區(qū)具有重要意義。角毫米波雷達(dá)數(shù)據(jù)基于直角坐標(biāo)系進(jìn)行數(shù)據(jù)處理,而當(dāng)車(chē)輛處于彎道行駛時(shí),常用方法很難判斷后方車(chē)輛是否與本車(chē)輛在同一車(chē)道上。基于此,提出基于車(chē)輛轉(zhuǎn)向模型和最小二乘法軌跡圓擬合相結(jié)合的道路曲率計(jì)算方法,從而判斷其它車(chē)輛與本車(chē)之間的相對(duì)車(chē)道位置,以此推測(cè)其它車(chē)輛是否對(duì)本車(chē)的正常行駛帶來(lái)危險(xiǎn),從而當(dāng)車(chē)輛在彎道行駛時(shí)降低盲區(qū)監(jiān)測(cè)系統(tǒng)的誤報(bào)率。
關(guān)鍵詞:盲區(qū)監(jiān)測(cè);轉(zhuǎn)向模型;道路曲率
中圖分類(lèi)號(hào):TN95? 文獻(xiàn)標(biāo)識(shí)碼:A? 文章編號(hào):1671-7988(2020)17-46-03
Research on Data Processing of Angular Radar for Curve Scene*
He Jia, Guo Peng, Tang Fengmin, Zhang Zhengqi, Xia Xianzhao
( China Automotive Technology&Research Center Co. Ltd Automotive Engineering Research Institute, Tianjin 300300 )
Abstract: As an assistant driver's visual angle system, vehicle blind area monitoring system is of great significance to reduce the blind area observed by drivers. The data of the angular radar is processed based on the rectangular coordinate system, but when the vehicle is in a curve, it is difficult to judge whether the rear vehicle is in the same lane with the vehicle. Based on this, a road curvature calculation method based on the combination of the vehicle steering model and the least square method of track circle fitting is proposed to judge the relative lane position between other vehicles and the vehicle, so as to speculate whether other vehicles bring danger to the normal driving of the vehicle, so as to reduce the false alarm rate of the blind area monitoring system when the vehicle is driving in the curve.
Keywords: Blind area monitoring; Steering model; Road curvature
CLC NO.: TN95? Document Code: A? Article ID: 1671-7988(2020)17-46-03
引言
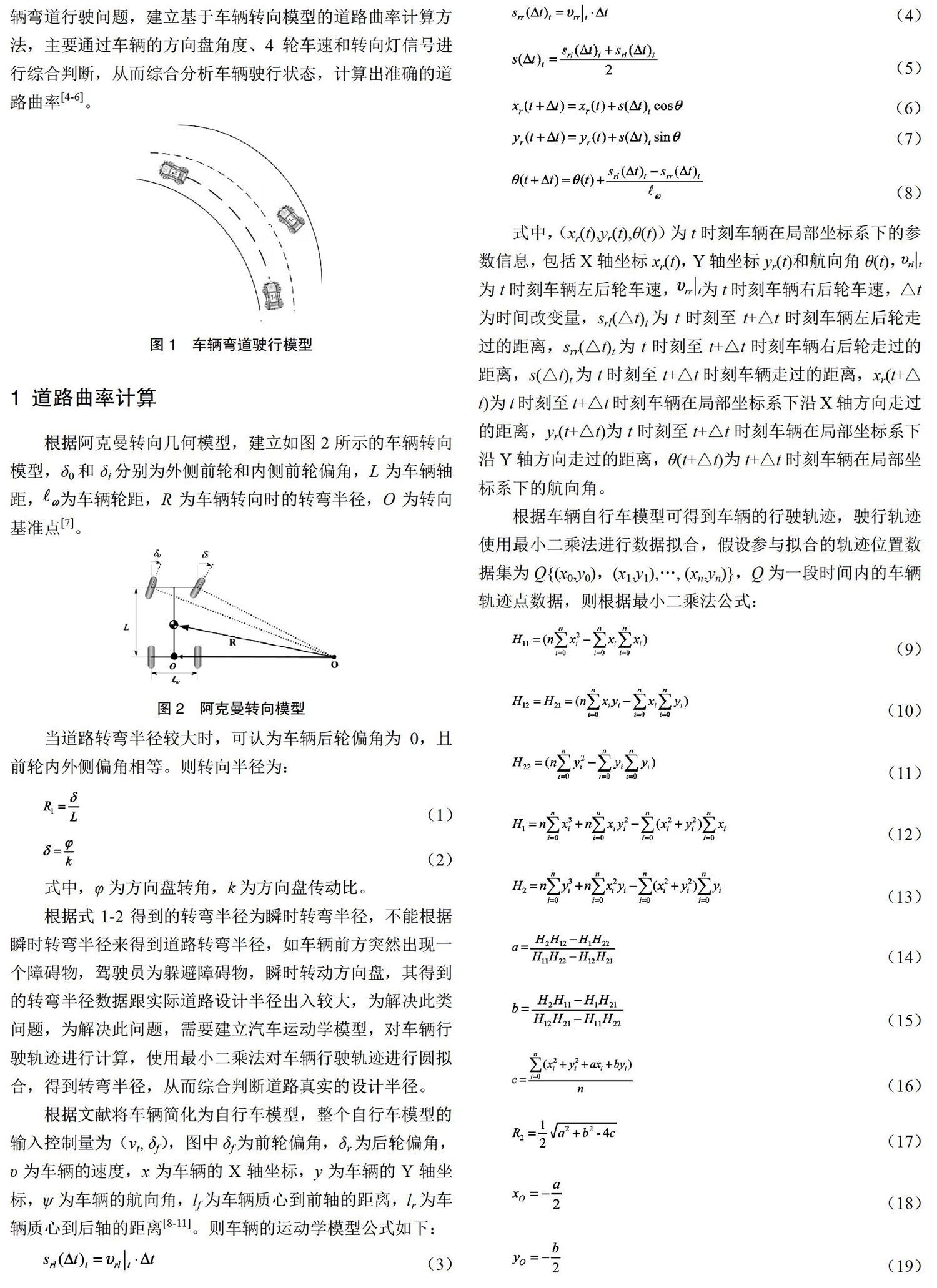
由于車(chē)輛自身結(jié)構(gòu)設(shè)計(jì)以及駕駛員注意力不集中的問(wèn)題,駕駛員駕駛車(chē)輛時(shí)不可避免的存在視覺(jué)盲區(qū),駕駛員視覺(jué)盲區(qū)分為多種,對(duì)駕駛員影響最大的視覺(jué)盲區(qū)為后視鏡盲區(qū),其后方的車(chē)輛或行人如果處于后視鏡盲區(qū)內(nèi),由于駕駛員無(wú)法對(duì)其進(jìn)行觀測(cè),將對(duì)駕駛員的安全帶來(lái)潛在危險(xiǎn)[1-3]。當(dāng)車(chē)輛行駛在彎道時(shí),由于駕駛員視覺(jué)差異問(wèn)題,不能很好判斷后方車(chē)輛與駕駛員駕駛的車(chē)輛之間的車(chē)道關(guān)系。如圖1所示,內(nèi)側(cè)車(chē)道車(chē)輛在彎道行駛時(shí),外側(cè)車(chē)道車(chē)輛可能位與其正后方,然而由于道路曲率,外側(cè)車(chē)道車(chē)輛與內(nèi)側(cè)車(chē)道車(chē)輛相互之間不會(huì)存在碰撞危險(xiǎn)。如高速行駛時(shí),后方車(chē)輛加速?gòu)淖笥覂蓚?cè)車(chē)道進(jìn)行超車(chē)時(shí),盲區(qū)監(jiān)測(cè)系統(tǒng)如果進(jìn)行報(bào)警,將嚴(yán)重影響駕駛員對(duì)盲區(qū)監(jiān)測(cè)系統(tǒng)的信任度和降低系統(tǒng)舒適性。為有效的保證盲區(qū)監(jiān)測(cè)系統(tǒng)報(bào)警的有效性,需要對(duì)車(chē)道處于彎道行駛時(shí)角毫米波雷達(dá)數(shù)據(jù)進(jìn)行特殊處理。為解決車(chē)輛彎道行駛問(wèn)題,建立基于車(chē)輛轉(zhuǎn)向模型的道路曲率計(jì)算方法,主要通過(guò)車(chē)輛的方向盤(pán)角度、4輪車(chē)速和轉(zhuǎn)向燈信號(hào)進(jìn)行綜合判斷,從而綜合分析車(chē)輛駛行狀態(tài),計(jì)算出準(zhǔn)確的道路曲率[4-6]。
1 道路曲率計(jì)算
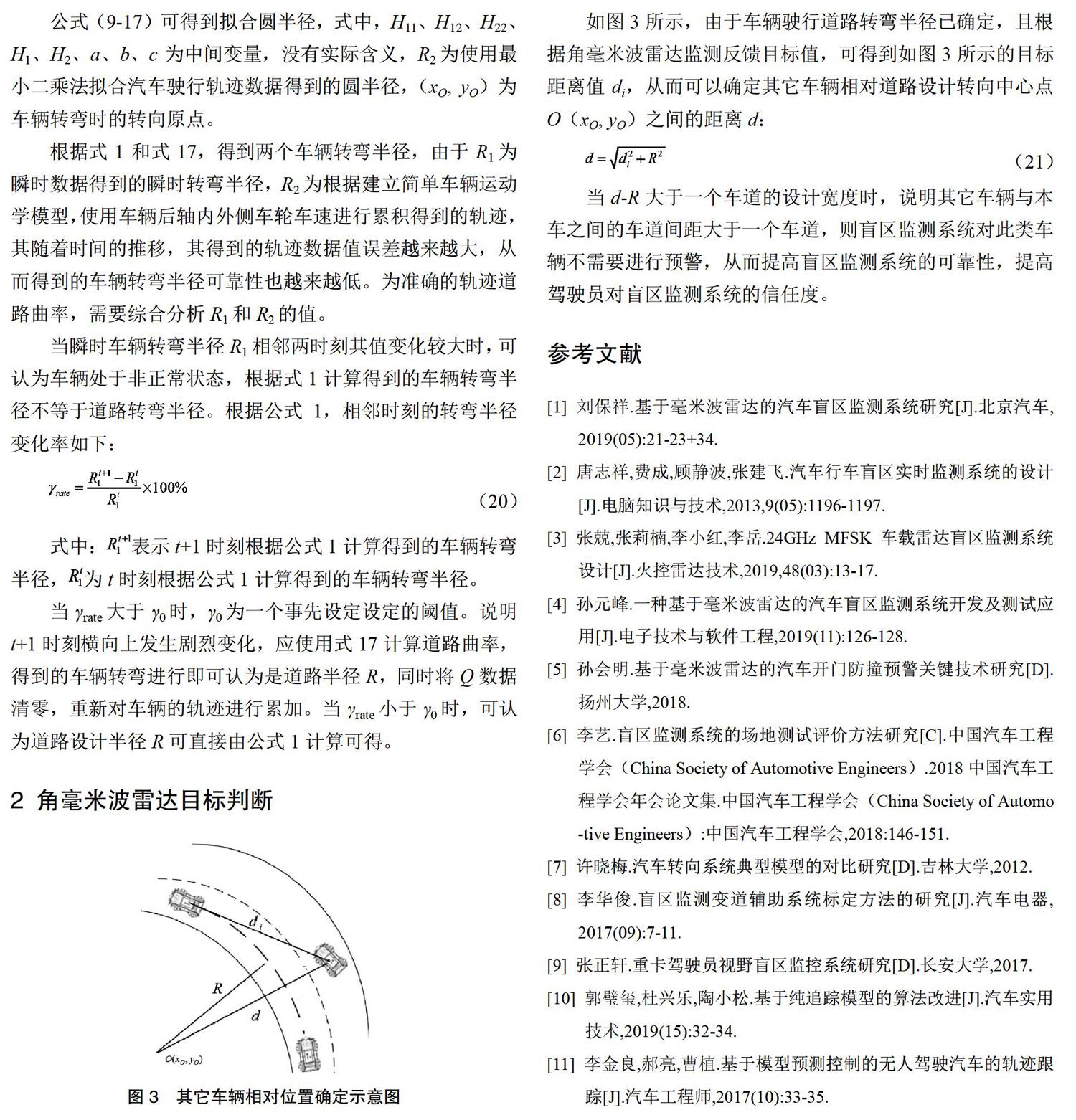
根據(jù)阿克曼轉(zhuǎn)向幾何模型,建立如圖2所示的車(chē)輛轉(zhuǎn)向模型,δ0和δi分別為外側(cè)前輪和內(nèi)側(cè)前輪偏角,L為車(chē)輛軸距, 為車(chē)輛輪距,R為車(chē)輛轉(zhuǎn)向時(shí)的轉(zhuǎn)彎半徑,O為轉(zhuǎn)向基準(zhǔn)點(diǎn)[7]。
當(dāng)?shù)缆忿D(zhuǎn)彎半徑較大時(shí),可認(rèn)為車(chē)輛后輪偏角為0,且前輪內(nèi)外側(cè)偏角相等。則轉(zhuǎn)向半徑為:
(1)
(2)
式中,φ為方向盤(pán)轉(zhuǎn)角,k為方向盤(pán)傳動(dòng)比。
根據(jù)式1-2得到的轉(zhuǎn)彎半徑為瞬時(shí)轉(zhuǎn)彎半徑,不能根據(jù)瞬時(shí)轉(zhuǎn)彎半徑來(lái)得到道路轉(zhuǎn)彎半徑,如車(chē)輛前方突然出現(xiàn)一個(gè)障礙物,駕駛員為躲避障礙物,瞬時(shí)轉(zhuǎn)動(dòng)方向盤(pán),其得到的轉(zhuǎn)彎半徑數(shù)據(jù)跟實(shí)際道路設(shè)計(jì)半徑出入較大,為解決此類(lèi)問(wèn)題,為解決此問(wèn)題,需要建立汽車(chē)運(yùn)動(dòng)學(xué)模型,對(duì)車(chē)輛行駛軌跡進(jìn)行計(jì)算,使用最小二乘法對(duì)車(chē)輛行駛軌跡進(jìn)行圓擬合,得到轉(zhuǎn)彎半徑,從而綜合判斷道路真實(shí)的設(shè)計(jì)半徑。
根據(jù)文獻(xiàn)將車(chē)輛簡(jiǎn)化為自行車(chē)模型,整個(gè)自行車(chē)模型的輸入控制量為(vt, δf),圖中δf為前輪偏角,δr為后輪偏角,υ為車(chē)輛的速度,x為車(chē)輛的X軸坐標(biāo),y為車(chē)輛的Y軸坐標(biāo),ψ為車(chē)輛的航向角,lf為車(chē)輛質(zhì)心到前軸的距離,lr為車(chē)輛質(zhì)心到后軸的距離[8-11]。則車(chē)輛的運(yùn)動(dòng)學(xué)模型公式如下:
(3)
(4)
(5)
(6)
(7)
(8)
式中,(xr(t),yr(t),θ(t))為t時(shí)刻車(chē)輛在局部坐標(biāo)系下的參數(shù)信息,包括X軸坐標(biāo)xr(t),Y軸坐標(biāo)yr(t)和航向角θ(t), 為t時(shí)刻車(chē)輛左后輪車(chē)速, 為t時(shí)刻車(chē)輛右后輪車(chē)速,△t為時(shí)間改變量,srl(△t)t為t時(shí)刻至t+△t時(shí)刻車(chē)輛左后輪走過(guò)的距離,srr(△t)t為t時(shí)刻至t+△t時(shí)刻車(chē)輛右后輪走過(guò)的距離,s(△t)t為t時(shí)刻至t+△t時(shí)刻車(chē)輛走過(guò)的距離,xr(t+△t)為t時(shí)刻至t+△t時(shí)刻車(chē)輛在局部坐標(biāo)系下沿X軸方向走過(guò)的距離,yr(t+△t)為t時(shí)刻至t+△t時(shí)刻車(chē)輛在局部坐標(biāo)系下沿Y軸方向走過(guò)的距離,θ(t+△t)為t+△t時(shí)刻車(chē)輛在局部坐標(biāo)系下的航向角。
根據(jù)車(chē)輛自行車(chē)模型可得到車(chē)輛的行駛軌跡,駛行軌跡使用最小二乘法進(jìn)行數(shù)據(jù)擬合,假設(shè)參與擬合的軌跡位置數(shù)據(jù)集為Q{(x0,y0),(x1,y1),…, (xn,yn)},Q為一段時(shí)間內(nèi)的車(chē)輛軌跡點(diǎn)數(shù)據(jù),則根據(jù)最小二乘法公式:
(9)
(10)
(11)
(12)
(13)
(14)
(15)
(16)
(17)
(18)
(19)
公式(9-17)可得到擬合圓半徑,式中,H11、H12、H22、H1、H2、a、b、c為中間變量,沒(méi)有實(shí)際含義,R2為使用最小二乘法擬合汽車(chē)駛行軌跡數(shù)據(jù)得到的圓半徑,(xO, yO)為車(chē)輛轉(zhuǎn)彎時(shí)的轉(zhuǎn)向原點(diǎn)。
根據(jù)式1和式17,得到兩個(gè)車(chē)輛轉(zhuǎn)彎半徑,由于R1為瞬時(shí)數(shù)據(jù)得到的瞬時(shí)轉(zhuǎn)彎半徑,R2為根據(jù)建立簡(jiǎn)單車(chē)輛運(yùn)動(dòng)學(xué)模型,使用車(chē)輛后軸內(nèi)外側(cè)車(chē)輪車(chē)速進(jìn)行累積得到的軌跡,其隨著時(shí)間的推移,其得到的軌跡數(shù)據(jù)值誤差越來(lái)越大,從而得到的車(chē)輛轉(zhuǎn)彎半徑可靠性也越來(lái)越低。為準(zhǔn)確的軌跡道路曲率,需要綜合分析R1和R2的值。
當(dāng)瞬時(shí)車(chē)輛轉(zhuǎn)彎半徑R1相鄰兩時(shí)刻其值變化較大時(shí),可認(rèn)為車(chē)輛處于非正常狀態(tài),根據(jù)式1計(jì)算得到的車(chē)輛轉(zhuǎn)彎半徑不等于道路轉(zhuǎn)彎半徑。根據(jù)公式1,相鄰時(shí)刻的轉(zhuǎn)彎半徑變化率如下:
(20)
式中: 表示t+1時(shí)刻根據(jù)公式1計(jì)算得到的車(chē)輛轉(zhuǎn)彎半徑, 為t時(shí)刻根據(jù)公式1計(jì)算得到的車(chē)輛轉(zhuǎn)彎半徑。
當(dāng)γrate大于γ0時(shí),γ0為一個(gè)事先設(shè)定設(shè)定的閾值。說(shuō)明t+1時(shí)刻橫向上發(fā)生劇烈變化,應(yīng)使用式17計(jì)算道路曲率,得到的車(chē)輛轉(zhuǎn)彎進(jìn)行即可認(rèn)為是道路半徑R,同時(shí)將Q數(shù)據(jù)清零,重新對(duì)車(chē)輛的軌跡進(jìn)行累加。當(dāng)γrate小于γ0時(shí),可認(rèn)為道路設(shè)計(jì)半徑R可直接由公式1計(jì)算可得。
2 角毫米波雷達(dá)目標(biāo)判斷
如圖3所示,由于車(chē)輛駛行道路轉(zhuǎn)彎半徑已確定,且根據(jù)角毫米波雷達(dá)監(jiān)測(cè)反饋目標(biāo)值,可得到如圖3所示的目標(biāo)距離值di,從而可以確定其它車(chē)輛相對(duì)道路設(shè)計(jì)轉(zhuǎn)向中心點(diǎn)O(xO, yO)之間的距離d:
(21)
當(dāng)d-R大于一個(gè)車(chē)道的設(shè)計(jì)寬度時(shí),說(shuō)明其它車(chē)輛與本車(chē)之間的車(chē)道間距大于一個(gè)車(chē)道,則盲區(qū)監(jiān)測(cè)系統(tǒng)對(duì)此類(lèi)車(chē)輛不需要進(jìn)行預(yù)警,從而提高盲區(qū)監(jiān)測(cè)系統(tǒng)的可靠性,提高駕駛員對(duì)盲區(qū)監(jiān)測(cè)系統(tǒng)的信任度。
參考文獻(xiàn)
[1] 劉保祥.基于毫米波雷達(dá)的汽車(chē)盲區(qū)監(jiān)測(cè)系統(tǒng)研究[J].北京汽車(chē), 2019(05):21-23+34.
[2] 唐志祥,費(fèi)成,顧靜波,張建飛.汽車(chē)行車(chē)盲區(qū)實(shí)時(shí)監(jiān)測(cè)系統(tǒng)的設(shè)計(jì)[J].電腦知識(shí)與技術(shù),2013,9(05):1196-1197.
[3] 張兢,張莉楠,李小紅,李岳.24GHz MFSK車(chē)載雷達(dá)盲區(qū)監(jiān)測(cè)系統(tǒng)設(shè)計(jì)[J].火控雷達(dá)技術(shù),2019,48(03):13-17.
[4] 孫元峰.一種基于毫米波雷達(dá)的汽車(chē)盲區(qū)監(jiān)測(cè)系統(tǒng)開(kāi)發(fā)及測(cè)試應(yīng)用[J].電子技術(shù)與軟件工程,2019(11):126-128.
[5] 孫會(huì)明.基于毫米波雷達(dá)的汽車(chē)開(kāi)門(mén)防撞預(yù)警關(guān)鍵技術(shù)研究[D].揚(yáng)州大學(xué),2018.
[6] 李藝.盲區(qū)監(jiān)測(cè)系統(tǒng)的場(chǎng)地測(cè)試評(píng)價(jià)方法研究[C].中國(guó)汽車(chē)工程學(xué)會(huì)(China Society of Automotive Engineers).2018中國(guó)汽車(chē)工程學(xué)會(huì)年會(huì)論文集.中國(guó)汽車(chē)工程學(xué)會(huì)(China Society of Automo -tive Engineers):中國(guó)汽車(chē)工程學(xué)會(huì),2018:146-151.
[7] 許曉梅.汽車(chē)轉(zhuǎn)向系統(tǒng)典型模型的對(duì)比研究[D].吉林大學(xué),2012.
[8] 李華俊.盲區(qū)監(jiān)測(cè)變道輔助系統(tǒng)標(biāo)定方法的研究[J].汽車(chē)電器, 2017(09):7-11.
[9] 張正軒.重卡駕駛員視野盲區(qū)監(jiān)控系統(tǒng)研究[D].長(zhǎng)安大學(xué),2017.
[10] 郭璧璽,杜興樂(lè),陶小松.基于純追蹤模型的算法改進(jìn)[J].汽車(chē)實(shí)用技術(shù),2019(15):32-34.
[11] 李金良,郝亮,曹植.基于模型預(yù)測(cè)控制的無(wú)人駕駛汽車(chē)的軌跡跟蹤[J].汽車(chē)工程師,2017(10):33-35.
