基于ADAS實驗平臺ACC系統控制研究
2020-09-26 09:43:01姜陽石晶付陽
汽車實用技術 2020年17期
姜陽 石晶 付陽

摘 要:隨著道路上交通事故發生率越來越高,汽車的發展速度也越來越快,為了降低由于駕駛員駕駛車輛途中發生事故的發生率,減少人員傷亡和財產損失。文章將在ADAS實驗平臺下,實現 MATLAB/Simulink 和 CarSim 軟件的聯合仿真,對ACC系統控制研究。
關鍵詞:自適應巡航;ADAS實驗平臺;聯合仿真
中圖分類號:U471.15? 文獻標識碼:A? 文章編號:1671-7988(2020)17-49-02
ACC System Control Research Based on ADAS Experimental Platform*
Jiang Yang, Shi Jing, Fu Yang
(College of Automobile and Transportation Engineering, Liaoning University of Technology, Liaoning Jinzhou 121000)
Abstract: As the occurrence rate of traffic accidents on the road is higher and higher, the development speed of automobiles is also faster and faster. In order to reduce the occurrence rate of accidents caused by drivers driving vehicles on the way, and reduce casualties and property losses. In this paper, the joint simulation of MATLAB/Simulink and CarSim software will be implemented under the ADAS experimental platform to study the ACC system control.
Keywords: Adaptive cruise; ADAS experimental platform; Joint simulation
CLC NO.: U471.15? Document Code: A? Article ID: 1671-7988(2020)17-49-02
前言
自適應巡航系統是智能輔助駕駛系統中研發較早技術較為成熟的車輛駕駛系統。是由傳統的巡航控制(CC)基礎上發展起來的,所以既具有傳統的巡航功能,又具有現代不同工況下的適應能力[1]。作為ADAS的研究熱點,在乘用車以及商用車領域均取得廣泛的研究。ACC系統通過控制制動力驅動力,可以有效減輕駕駛員的負擔,避免因誤操作或疏忽造成的惡意交通事故,提高道路利用率,確保行車安全[2]。
1 ACC系統
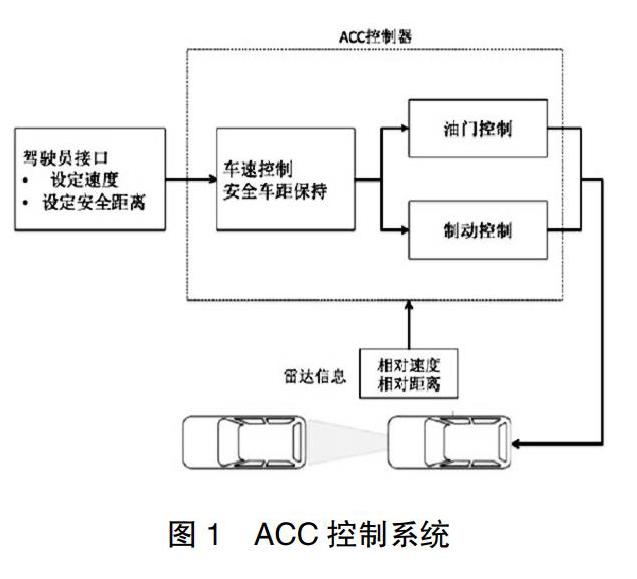
ACC控制系統主要由雷達傳感器、ACC控制器、執行器三部分組成。雷達傳感器目前主要以毫米波雷達和激光雷達為主。其作用都是探測前方信息主要是車輛行駛狀態信息。ACC控制器是整個系統中的電子控制單元。將雷達傳感器采集的信號經過設計好的控制策略和算法做出適當的控制命令。執行器主要是準確的執行電控單元計算發出的指令。主要為控制車輛的節氣門開度和制動力[3]。如圖1。
2 ADAS實驗平臺
ADAS實驗平臺采用美國國家儀器公司的操作系統,由中華V3駕駛模擬器、主控計算機、實時采集系統和快速原型控制器組成[4]。以CarSim仿真軟件為核心的仿真軟件用于設置車輛模型、道路模型、場景設置的初始狀態、仿真時間和相應的數據接口等仿真參數。實時采集系統用于在駕駛模擬器中捕獲制動、轉向、加速度等信號,在CarSim中設置虛擬雷達和攝像機信號,通過Can通訊信號傳輸到快速成型控制器,在經過控制策略和算法計算結果再將采集到的信號傳輸到駕駛模擬器上,在主控制計算機中,車輛動力學信號、虛擬雷達信號和攝像機信號可以實時顯示,進而實現高級駕駛輔助功能。
3 軟件聯合仿真
CarSim是 MSC公司開發的車輛動力學仿真軟件。該軟件性能較好動力學模型。其功能主要包括:模型設置和參數設置、數學模型的求解與輸出仿真3D效果演示動畫[5]。
Simulink 是 MATLAB 中的一部分,具有 動態系統建模、仿真和分析等功能。
在CarSim與Simulink聯合仿真時,首先需要定義CarSim與Simulink 的接口,CarSim的輸入接口控制巡航車輛的驅動與制動。ACC系統需要獲取從CarSim 中的車輛信息以及傳感器探測的信息,CarSim的輸出本車信息接口和雷達信息接口。本車信息包括車輛速度、變速器、制動踏板信號、加速器踏板信號、車輛左右轉向信號、自加速信號、發動機轉速信號等。雷達信號結口包括前后車相對距離、相對速度和相對角速度信號等。
3.1 仿真分析
設置前車與后車開始車速都以72 km /h的初始速度行駛,二者相距60m,設置主車以90 km /h巡航行駛,20s后
開始以-1.0 m /s的加速度減速10s,后以36 km /h的速度行駛,仿真時間為60s。仿真結果如圖2。
4 結論
本文將設計好的自適應巡航控制策略及算法通過Simulink 建模,然后將控制策略算法和搭建模型運行到ADAS 實驗平臺上進行仿真。運用 Carsim 作為仿真軟件,可實現對設計好的 ACC 系統的進行仿真驗證。并且提供了虛擬實車驗證試驗平臺,為基于ADAS實驗平臺ACC系統控制研究打下基礎。
參考文獻
[1] 吳光強,張亮修,劉兆勇,郭曉曉.汽車自適應巡航控制系統研究現狀與發展趨勢[J].同濟大學學報(自然科學版),2017,45(04):544- 553.
[2] 孫鵬飛.汽車自適應巡航系統(ACC)起停控制研究[D].吉林大學, 2018.
[3] 李肖含.汽車自適應巡航控制系統模糊控制策略研究[D].北京理工大學,2015.
[4] 許廣吉,石晶.ADAS實驗平臺硬件在環仿真[J].汽車實用技術, 2019(09):42-43.
[5] 王凱強.自適應巡航控制算法及策略研究[D].遼寧工業大學,2019.
