水培葉菜移植輸送自動化裝備的設計和試驗
2020-09-27 23:21:45劉霓紅徐燦熊征吳玉發王周宇黃健榮
農業工程技術·溫室園藝 2020年7期
劉霓紅 徐燦 熊征 吳玉發 王周宇 黃健榮


中國設施蔬菜種植面積與產量均位于世界第一位,現如今蔬菜產業已成為國內各省市農民脫貧增收的支柱產業。目前中國設施蔬菜栽培方式主要以土壤種植栽培為主,而周年作業必然導致溫室土壤化肥農藥富集,嚴重威脅中國農產品質量安全。近年來,隨著設施農業自動化生產技術在全球范圍內的不斷發展與推廣提升,中國在蔬菜種植行業引入設施農業自動化生產技術進行生產所占的比重逐年增大。其中,設施管道式水培葉菜具有節水、節肥、省藥、農產品質量安全和環境友好等優勢,可解決傳統土培所致的設施環境生態惡化的弊端。目前,國內溫室設施中的管道通常置于固定架上,在整個設施管道水培葉菜的生產過程中,其移植和采收環節均需要人工作業,或人為干預率較高,同時由于作業空間狹小,且人工作業勞動強度大、作業效率低,因此無法滿足新常態下農業高效節能生產需求和高質量發展要求。為解決以上問題,廣東省現代農業裝備研究所團隊設計了以下水培葉菜移植輸送關鍵環節自動化技術及裝備。
水培葉菜自動化生產裝備工作流程
針對目前國內設施管道水培葉菜裝備層次總體較低、人為干預率過高、人工作業勞動強度大、作業效率低等缺陷問題,針對管道式水培葉菜全程自動化生產過程中的移植和輸送關鍵環節設計研制了一種管道式水培葉菜自動化生產裝備。
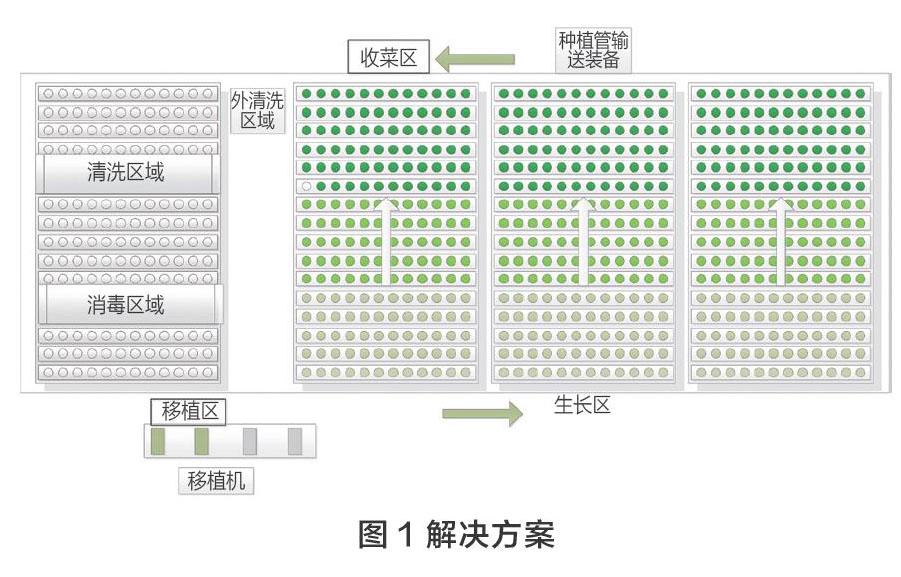
管道式水培葉菜自動化生產裝備在廣東省農業技術推廣總站溫室(以下簡稱“推廣總站”)進行了示范與展示,該解決方案如圖1所示,該裝備劃分為移植區、生長區、收菜區以及清洗消毒區等幾個區域。移植區布置有自主研發的水培葉菜移植機,將葉菜幼苗從穴盤移植到種植管內;當種植管內種滿葉菜幼苗,種植管輸送裝備將種植管輸送到生長區并提供其生長發育所需的溫光水氣肥等生長要素;葉菜生長成熟后,種植管輸送裝備將種植管輸送到收菜區,人工收獲種植管內的成熟葉菜;種植管輸送裝備輸送采收后的空種植管分別經過外部清洗區域、內部清洗區域和消毒區域,完成種植管外表面和內腔的清洗和消毒;清洗消毒后的種植管被輸送到移植區等待下一次的移植;重復上述步驟可以實現水培葉菜移植和輸送環節的自動化。隨著水培葉菜自動收獲技術與裝備的不斷成熟,該裝備配合使用可以實現管道式水培葉菜從移植-生長-收獲的全程機械化和自動化,提升設施管道水培葉菜裝備層次,減少勞動強度和人為干預率,提高產量和效益。
水培葉菜移植環節自動化裝備
目前,水培葉菜生產作業中的移苗環節主要依靠人工完成,隨著蔬菜的需求量與日俱增、勞動力成本越來越高,蔬菜種植的高效化和機械化成為了蔬菜種植業的迫切需求。
移苗系統設計遵循的原則
水培葉菜移苗系統是針對水培葉菜生產的移苗環節,將穴盤苗自動移植到種植管內。因此,該移苗系統的設計需遵循以下原則:①針對水培葉菜育苗盤規格為72穴;②移苗系統一次對葉菜育苗盤的整排進行移植,一次移植6株葉菜苗;③移苗系統的進苗端與苗盤輸送系統對接,需實現苗盤自動輸送到移苗系統;④移苗系統的出苗端與種植管輸送系統銜接,需針對單條種植管進行移植并輸送。
移苗系統硬件
移苗系統的移植機如圖2所示,包括供盤帶、苗盤推送機構、苗盤精準輸送機構、移植手取苗機構、種植管精準輸送機構以及控制系統,其中移植手取苗機構包括移植手、移植手水平輸送機構和移植手變距機構。供盤帶主要功能是為移苗機輸送待移植的葉菜苗。苗盤推送機構將供盤帶上的苗盤推送到苗盤精準輸送機構處。苗盤精準輸送機構使苗盤以步進的方式到達移植手作業范圍。在移植手取苗機構的作用下,移植手抓取苗盤內的一排葉菜苗并將其精準放入到種植管的種植孔內。移植手返回到初始位置,種植管精準輸送機構使種植管向前移動6個孔位,繼續下一次的移植作業。當種植管內種滿葉菜苗后,種植管精準輸送機構將種植管輸送到種植管輸送設備中,并接收種植管輸送設備輸送的空種植管并對其進行葉菜苗移植,循環上述流程,完成葉菜苗移植作業。
為了實現移苗系統的移苗成功率,移苗系統的移植手取苗機構所完成的取苗、輸送和移植的動作需要精準控制,因此,苗盤精準輸送機構和移植手水平輸送機構均采用伺服電機驅動,達到移植手的精準定位。供盤帶的輸送精度要求不高,因此選擇常用的交流減速機驅動即可。移植手取苗機構和苗盤推送機構采用氣力驅動的方式,結構簡單、動作準確。栽培管精準輸送機構采用交流減速機結合楔形導向塊的方式,實現栽培管的定位輸送。
移苗系統軟件
根據移苗系統的作業流程,軟件采用FX3GA-60MT/CM型號PLC可編程序控制器進行編程實現,軟件實現的順序功能如圖3所示。
移苗系統樣機測試
移苗系統樣機調試后進行了整機性能測試,選擇不同根系狀況種苗、移植手水平加速度和豎直加速度作為影響因素進行正交試驗,結果表明移植手抓取成功率可達90%,移栽效率可達1200株/h。其中,種苗的根系狀況對移植手的抓取成功率影響最大,水平和豎直加速度對移植成功率影響較小。
水培葉菜種植管自動化輸送裝備
種植系統需求分析
隨著水培葉菜生產規模逐漸擴大,其生產作業過程中的種植管、種苗及收獲葉菜的輸送用工量大的問題,正成為行業發展的瓶頸,針對以上問題,研制了水培葉菜種植管自動化輸送裝備。
種植系統設計遵循的原則
水培葉菜移苗系統是針對水培葉菜生產的種植管輸送環節,完成移植和采收環節種植管的自動化輸送。因此,該種植系統的設計需遵循以下原則:①針對水培葉菜管道淺液流水培種植模式;②針對水培葉菜種植管尺寸為3750 mm×75 mm×50 mm,種植管上分布有24個直徑為50 mm,間距為150 mm的種植孔;③種植系統每次對1根種植管進行輸送;④種植系統的移植區與移苗系統對接,需提供空種植管等待幼苗移植;⑤種植系統需提供葉菜生長所需的肥液,實現肥液循環;⑥種植系統需實現種植管循環輸送。
技術參數與技術指標
管道式水培葉菜種植管自動化輸送裝備適用于管道淺液流水培種植模式,葉菜種植于種植管上的種植孔內。種植管表面設置有營養液入口,種植管底部設置有營養液出口。管道式水培葉菜自動化生產裝備的主要功能是完成移植和采收環節種植管的自動化輸送,此外該裝備設有移植區和收菜區,避免了工作人員進入生產區從事作業,增加了葉菜種植密度,并且通過對種植管的清洗和消毒,實現了種植管在水培葉菜生產過程中的循環使用,為葉菜生產全程無人化作業提供基礎。本研究要求種植管在水培葉菜自動化輸送裝備上的運行成功率大于98%,縱向運輸機構運行一次時間小于5 s,橫向運輸機構輸送一次種植管時間小于15 s,符合設備研制生產的技術要求。
種植系統硬件
如圖4所示,種植管輸送裝備主要由輸送床、外清洗機構、內腔清洗消毒機構和控制系統等組成。根據功能,將輸送床分為種植床和清洗床,一般有多列種植床,1列清洗床,如在推廣總站示范的項目有3列種植床和1列清洗床;外清洗機構布置在種植床和清洗床之間;內腔清洗消毒機構根據噴頭噴出溶液成分分為內腔清洗機構和內腔消毒機構,內腔清洗消毒機構分別布置于清洗區域和消毒區域。
圖5所示為輸送床,輸送床主要由縱向輸送機構、橫向輸送機構以及營養液循環機構等組成。縱向輸送機構主要功能是實現種植管在輸送床上的縱向步進輸送,將種植管從種植床一端輸送到另一端,每次向前移動一步;橫向輸送機構布置在輸送床的兩端,其將種植管從一個輸送床輸送到另一個輸送床,實現種植管跨床輸送;營養液循環機構主要由營養液槽、滴頭、營養液泵等組成,當縱向輸送機構和橫向輸送機構停止時,營養液泵將營養液通過滴箭滴入種植床上種植管的營養液入口,通過種植槽的高差,營養液從種植管出口流出,營養液槽收集營養液排入消毒過濾池,營養液經消毒過濾后,由營養液泵將營養液通過滴箭滴入種植管,實現營養液循環。
如圖6所示,外清洗機構主要由毛刷、電機以及集水槽等組成,其主要功能是清洗葉菜收獲后種植槽的外表面。種植床的橫向輸送機構將種植管送入外表面清洗機構入口處,電機帶動毛刷對種植管的4個面進行清洗,清洗完畢后種植管從出口處進入清洗床的橫向輸送機構,清洗后的廢水由集水槽收集并排出。
內腔清洗機構和內腔消毒機構結構相同,統稱為內腔清洗消毒機構,結構如圖7所示,主要由噴嘴、氣缸等組成,內腔清洗機構和內腔消毒機構分別安裝在清洗床上方,分別對種植管內腔進行清洗和消毒。當種植管由清洗床縱向輸送機構輸送到清洗消毒機構正下方時,氣缸伸出使噴嘴伸入種植管內部,噴嘴分別噴射清洗液和消毒液,實現對種植管內腔的清洗和消毒。
種植系統軟件
本研究設計的系統根據元件的控制要求和數量,可編程序控制器的選型為FX3U-128MR-ES-A以及擴展模塊FX2N-32ER等。根據系統的作業流程,軟件采用PLC可編程序控制器進行編程實現。觸摸屏控制界面由手動模式、自動模式、參數設置和開關狀態區構成。
◆手動模式界面
如圖8所示,系統處于手動模式下,按下電控柜上對應的控制按鈕,相對應的動作在運行或完成后可分別通過界面監控其運行狀態。
◆自動模式界面
如圖9所示,監控工作狀態下各個區域的運行狀態,可實時查看各電機、氣缸是否在正常運行,設備在種植模式下還有多少種植管未完成種植。
◆參數設置界面
如圖10所示,點擊種植區中的滴液間隔和滴液時間,清洗區的消毒時間和清洗時間,可分別按照品種設置不同的時間。彈出數字框與數字小鍵盤,通過數字小鍵盤設定作業時間后,點擊數字小鍵盤上“ENTER”鍵完成作業時間設置。
操作流程如下:①將電控柜上的模式旋鈕調到自動模式,等待電控柜上啟動指示燈常亮,設備進入自動模式;②想收獲某列種植床上的葉菜,在觸摸屏上點擊對應區的成熟按鈕,使之變紅為選定狀態,在成熟量上輸入需要收獲的種植管數量;③在種植區的按鈕盒上按下成熟確認按鈕,設備進入種植收獲模式,清洗床將種植管送至移苗區,待移苗機完成移苗工作,將移苗后的種植管輸送到對應的種植床,并將對應種植床上成熟的葉菜輸送到收菜區;④成熟葉菜全部從種植管上采收完畢后,人工按下按鈕盒上的工作完成按鈕,輸送種植管進入外清洗機構,輸送外表面被清洗后的種植管至清洗床;⑤清洗床將種植管輸送到內腔清洗機構和內腔消毒機構處,兩個機構分別對種植管內腔進行清洗和消毒;⑥重復以上3~5的動作,直至觸摸屏上剩余量為0后,移苗及輸送采摘結束。
種植管輸送裝備樣機測試
樣機調試后進行了整機性能測試,樣機驗證試驗表明樣機的縱向運輸成功率為100%,平均周期為2.09 s,橫向運輸成功率為98.67%,平均周期為12.17 s,滿足設計要求與水培種植農藝要求。
總結
國外經驗啟示,水培葉菜生產中發展機械化、自動化成為一種趨勢,可有效提高勞動生產率,降低生產成本,提高經濟效益。針對中國設施園藝機械化需求,研發適用于中國設施園藝的水培葉菜移植輸送關鍵環節自動化技術及裝備對中國設施農業發展具有重要的意義,為設施園藝的水培葉菜生產的機械化、自動化和工廠化提供了基礎。
*項目支持:廣東省重點領域研發計劃-設施園藝物流化輸送智能裝備研究與示范(2019B020222002);2018年省級設施農業建設項目-設施園藝機械化需求的水培葉菜關鍵環節自動化技術及裝備的研發應用(粵財農【2018】125號)。
作者簡介:劉霓紅(1972-),男,高級工程師,主要從事現代農業設施及裝備的科研開發和推廣應用工作。
[引用信息]劉霓紅,徐燦,熊征,等.水培葉菜移植輸送自動化裝備的設計和試驗[J].農業工程技術,2020,40(19):23-27.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08
