應用于視覺SLAM的自適應去霧算法
2020-09-29 08:07:46劉自若侯嘉瑞梁西昌
計算機工程與設計 2020年9期
劉自若,萬 熠+,侯嘉瑞,梁西昌,孫 堯
(1.山東大學 機械工程學院 高效潔凈機械制造教育部重點實驗室,山東 濟南 250061;2.山東大學 機械工程國家級實驗教學示范中心,山東 濟南 250061)
0 引 言
近年來,視覺SLAM及相關圖像處理算法受到了廣泛的關注并取得了一定的研究成果,其中,Endres等[1]提出了基于SIFT特征點檢測算子的地圖建立方法,但計算量較大,難以滿足實時性需求;Engel等[2]提出了一種采用直接法視覺里程計的SLAM方法,省卻了特征點提取的復雜運算,可以實時運行,但該算法在光線強度會發(fā)生變化的環(huán)境下穩(wěn)定性較差;Mur-Artal等[3]提出了基于單目相機的SLAM算法,使用了ORB算子進行特征點的檢測和描述,該SLAM算法的運算速度可達每秒25-30幀,能夠滿足視覺系統(tǒng)的實時性需求。但在實際應用中,例如在霧氣遮擋、煙塵遮擋等天氣環(huán)境條件下,相機所捕獲的圖像信息將不再穩(wěn)定和可靠[4]。而不穩(wěn)定的圖像將嚴重影響視覺系統(tǒng)的工作[5],尤其在霧天條件下,由于特征稀疏[6],造成了視覺SLAM系統(tǒng)的穩(wěn)定性差,對視覺系統(tǒng)的工作精度以及工作效率造成很大影響,甚至會引起整個視覺系統(tǒng)的癱瘓。
為解決上述問題,需研究一種適合于視覺SLAM系統(tǒng)的圖像去霧算法,使視覺SLAM系統(tǒng)在霧天環(huán)境下仍能具有較強的魯棒性。
1 基于ORB算子的視覺SLAM系統(tǒng)
本文構建了ORBSLAM系統(tǒng)[3],并在后文使用圖像去霧算法對其進行了改進,該系統(tǒng)主要由視覺里程計、圖優(yōu)化及閉環(huán)檢測模塊、建圖模塊組成。
1.1 視覺里程計
視覺里程計的主要作用是建立攝像頭捕捉到的兩幀圖像之間的聯(lián)系,并由此計算相機的位姿變化和圖像中各點的空間位置。特征點法是實現(xiàn)視覺里程計的一種常用方法,通過匹配相鄰兩張圖像的共同特征點,獲取相機的運動姿態(tài)以及空間位置。
ORB算子使用帶有形心向量的oFAST算法檢測圖像中的特征點,使用對旋轉敏感的rBRIEF描述子對特征點進行描述,相較于傳統(tǒng)的SIFT算子及SURF算子,計算量更低。本文所構建的SLAM系統(tǒng)使用ORB算子進行圖像的特征點檢測和描述,以提高運算速度。
1.2 閉環(huán)檢測和圖優(yōu)化算法
本文所構建的SLAM系統(tǒng)使用閉環(huán)檢測算法和圖優(yōu)化算法共同保證所建地圖的有效性。
由于相機所采集的圖像中具有噪聲,SLAM系統(tǒng)在進行建圖的過程中,不可避免會產生誤差,并且隨地圖的拓展不斷累積。為此,使用圖優(yōu)化算法進行誤差抑制以提高建圖的準確性。同時,SLAM系統(tǒng)在運動到之前曾經經過的位置時,由于存在誤差,在所建立的地圖中,系統(tǒng)的位置有時并不處于實際對應位置。為此,引入閉環(huán)檢測模塊,在檢測到曾到達的位置時,將信息輸入圖優(yōu)化模塊進行處理,修正誤差。
1.3 建圖模塊
拓撲地圖與度量地圖是SLAM系統(tǒng)中兩種較為常用的地圖類型。相較而言,度量地圖具有更多信息,可以表示更為復雜的地形,適合工作于未知環(huán)境下的SLAM系統(tǒng)。而點云地圖可直接使用特征點構建地圖,是一種更為適合于視覺SLAM的地圖類型,本文使用點云地圖作為構建地圖的類型。
2 自適應快速圖像去霧算法
在圖像去霧方面,Zhang等[7]對暗通道先驗去霧算法進行了優(yōu)化,提高了算法的運算速度。何等[8]提出了一種快速圖像去霧算法,將算法運行時間縮短了50%,但面對霧濃度不同的圖像時,仍存在需手動調整去霧參數的問題。針對當前去霧算法存在的問題,本章提出了一種適用于視覺SLAM系統(tǒng)的自適應圖像去霧算法。
2.1 基于大氣散射模型的快速圖像去霧算法
基于大氣散射模型[9],可知霧天環(huán)境下圖像的退化滿足以下關系
F(x,y,z)=P(x,y,z)exp(-sh(x,y,z))+
L(1-exp(-sh(x,y,z)))
(1)
式中: exp(-sh) 代表介質透射率,F(xiàn)為霧氣遮擋圖像,P為未受到霧氣遮擋的清晰圖像,h代表圖像的景深,s代表大氣散射系數,L表示全局大氣光的值,且L=[Lo,Lo,Lo]T。
通過引入環(huán)境光N對式(1)進行簡化表示
FL=P(L-N)+NL
(2)
因此,對一幅霧退化圖像,若求出環(huán)境光N及大氣光L,即可還原出去除霧氣遮擋的清晰圖像。
由式(1)可知
L(1-exp(-sh))≤F
(3)
求出霧氣遮擋圖像F各通道中的最小值D,則
(4)
對D進行均值濾波,則可認為介質透射率的值滿足以下關系
(5)
式中:μ為偏移補償系數,用來對介質透射率進行偏移補償,其計算公式如下
(6)
式中:γ是設定的去霧參數,影響圖像的去霧程度。依據上式求出μ值后,聯(lián)立式(3)、式(4)以及式(5)估計介質透射率的值和環(huán)境光的值
(7)
(8)
由式(5)可知,Davg≤L。 且L的值小于圖像三通道的最大值。因此可估計大氣光L的值
(9)
獲取環(huán)境光N和大氣光L的估計值之后,代入式(2)進行運算可還原出去霧圖像。在進行還原運算時,參數γ越大則去霧圖像的去霧效果越強。
由于SLAM系統(tǒng)所處環(huán)境的霧濃度是未知的,因此在不同環(huán)境下使用固定去霧參數γ會導致圖像過度去霧或去霧不完全,若過度去霧會導致圖像失真[10],使SLAM系統(tǒng)檢測到錯誤的特征;而去霧不完全將導致圖像無法滿足SLAM系統(tǒng)提取特征點[11]的需求。
2.2 自適應圖像去霧算法
為解決去霧算法無法根據圖像霧濃度自適應調節(jié)去霧參數γ的問題,本文使用去霧參數的校正算法對2.1節(jié)中的去霧算法進行了改進。
根據式(7)和式(1),當介質透射率為1-D/Lo時,意味著去霧圖像滿足以下條件[12]
(10)
在去霧圖像P中滿足式(10)條件的像素點處,RGB三通道中必有一通道取值為0,即該像素點的三通道之一在進行去霧計算時受到阻塞,下文將該類像素點稱為阻塞點。阻塞點的去霧程度較深,易導致圖像失真。因此,整幅圖像阻塞點占比越高,則表示整幅圖像去霧程度以及圖像失真程度越高。
圖像阻塞點占比β的計算公式如下
(11)
式中:Z為阻塞點數目,N為圖像像素點總數。
使用2.1節(jié)中所述基于大氣散射模型的圖像去霧算法,設置了不同去霧參數γ對收集到的100張含霧圖像進行了去霧處理。部分圖像去霧效果如圖1所示,從圖像中可以看出圖像的去霧程度越深,阻塞點占比β越大。
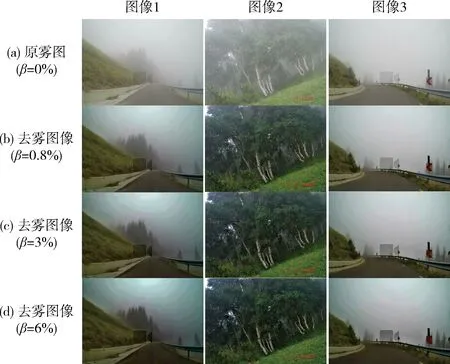
圖1 部分圖像的去霧效果
又由式(6)知,參數γ的取值可決定圖像的去霧程度。
因此,依據阻塞點占比β反映圖像去霧程度、去霧參數γ決定圖像去霧程度的原理,提出了一種自適應去霧算法,算法的核心思想是:設定去霧圖像理想阻塞點占比βt,在對視頻前一幀圖像進行去霧處理后,計算去霧圖像的實際阻塞點占比β,若β過大或過小則根據理想阻塞點占比與實際阻塞點占比之間的差值Δβ校正去霧算法中的參數γ,然后再繼續(xù)對下一幀圖像進行處理,如此每處理一幀圖像就對去霧參數γ進行一次校正,以保證去霧算法在未知霧濃度環(huán)境下的去霧效果,算法流程如圖2所示。
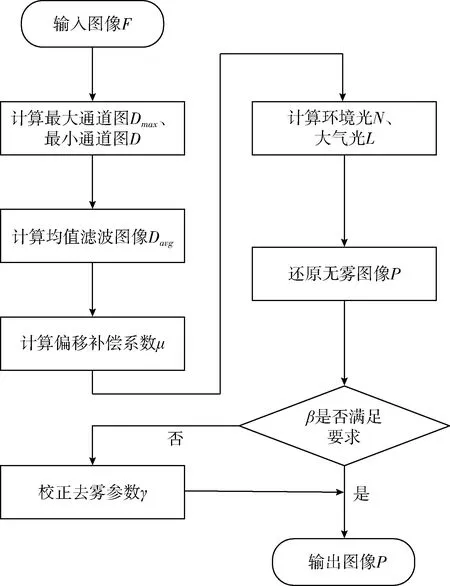
圖2 自適應去霧算法流程
為確定理想阻塞點占比βt,對100張含霧圖像的去霧結果進行了比較,得出了如下結論:當去霧圖像的阻塞點占比為0.4%-4%時,圖像的去霧效果較好,在檢測去霧圖像中特征點時不易出現(xiàn)特征點過少的現(xiàn)象;當去霧圖像的β值在0.8%左右時,去霧圖片不易出現(xiàn)失真現(xiàn)象,去霧效果最理想,因此,可將去霧圖像的理想阻塞點占比βt設為0.8%。
接下來,需設定合適的去霧參數γ初值,以縮短參數校正的過程、提高自適應算法的效率。為此,對收集到的100張含霧圖像分別進行去霧處理,使去霧圖像的阻塞點占比β=0.8%, 并記錄此時去霧參數γ的值,獲得了100張去霧圖像β=0.8%時的γ分布柱狀圖如圖3所示,圖中曲線為根據γ的平均值和標準差生成的正態(tài)分布曲線。

圖3 γ的取值分布柱狀圖
根據圖中γ的取值分布特征和正態(tài)分布曲線特征,將去霧參數γ的初值設定為1.15。
在校正去霧參數γ時,自適應算法結合了PID算法,令Δβ=βt-β, 則每次校正的校正量為
(12)
實際上對連續(xù)的圖像來說,即便使用相同的去霧參數γ,去霧圖像的阻塞點占比β仍會產生一定的波動。在這種情況下PID算法中的微分項將會影響算法性能,因此將PID算法簡化為PI算法
(13)
為方便確定上式中的Kp和Ki,本文統(tǒng)計了去霧圖像不同阻塞點占比β與對應去霧參數γ的數據,以探究圖像阻塞點占比β與去霧參數γ之間的關系。結果表示:對絕大多數含霧圖像,均存在對應的參數a,b∈[0,1], 當參數γ的取值在 [a,b] 內時,γ和β滿足非線性正相關關系;當參數γ取值在 [0,a] 內時,圖像不存在阻塞點;當參數γ取值在 [b,1] 內時,μ值不隨γ增大而增大,阻塞點占比β恒定不變。圖4所示為圖1中3幅含霧圖像在去霧過程中的β-γ關系曲線,從該圖中可以看出β與γ之間的關系。
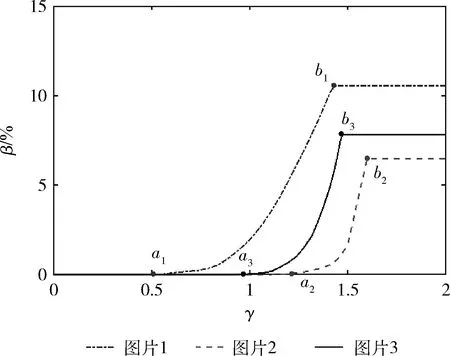
圖4 去霧圖像的β -γ關系曲線
根據β-γ關系曲線特征以及阻塞點占比和圖像去霧效果之間的關系特征,設計校正約束條件

(14)

(15)
Δγ=0, Δβ∈(-0.001,0.001)
(16)
(17)
(18)
(19)
其中,m為算法在校正參數γ的過程中γ=0的次數,Vn為校正過程中Δβ變換符號的次數。式(16)為算法在有霧環(huán)境下的校正結束條件,當滿足該結束條件時,結束校正過程,使校正算法休眠,在接下來的運行過程中若檢測到β<4%或β>0.4%, 則重新喚醒校正算法,對去霧參數進行調整。式(18)為算法在無霧環(huán)境下的校正結束條件,在無霧環(huán)境下將去霧參數設置為0。
在校正過程中,為保證自適應算法的收斂性,避免發(fā)生校正失敗的情況,當檢測到β的取值由0.8%的一側向另一側發(fā)生跳變時,開始記錄算法每次迭代后γ和β的值,若繼續(xù)歷經20次迭代后仍無法滿足算法的結束條件,則結束參數校正過程,令γ為迭代過程中使阻塞點占比最接近0.8%時的值
γ=γr, |βn-βt|≥|βr-βt|, (n=1.2.3…20)
(20)
自適應算法的偽代碼如下:
adaptive-algorithm:
procedure Calm()
{01} if (β=0) m=m+1;
{02} if (m≥8) mflag=true;γ=0;
procedure Calend()
{03} if (|Δβ|≤0.001) endflag=true;sleepflag=false;m=0;num=0;
procedure Calsleep()
{04} if (preΔβ1*Δβ<0) sleepflag=true;
{05} if (sleepflag){
{06} num=num+1;
{07} if (num=1) preγ=γ;preΔβ=Δβ;
{08} |preΔβ|=fabs(preΔβ);
{09} if (|Δβ|<|preΔβ|)preγ=γ;preΔβ=Δβ;
{10} if (num≥20) totalendflag=true;γ=preγ;}
procedure Main()
{11} initialize();
{12} if ((endflag)OR(totalendflag)OR(mflag))reset=0;
{13}γ=γ+reset;
{14} P=dehaze(F,γ);
{15} Δβ=getdelta();
{16} |Δβ|=fabs(Δβ)
{17} if (reset≠0)Calm();Calsleep();Calend();
{18} if ((β>0.04)OR(β<0.004))endflag=false;
{19} reset=Calreset();
{20} preΔβ1=Δβ;
偽代碼中,F(xiàn)代表有霧圖像,P代表去霧圖像,initia-lize 函數為定義函數,負責對代碼中的變量進行定義,dehaze 函數負責對圖像進行去霧處理,getdelta函數負責計算Δβ,Calreset函數負責根據式(13)計算校正量Δγ,代碼中去霧參數γ的初始值為1.14,reset的初始值為0.01。
使用上述算法對圖像進行去霧處理可獲得較好的去霧效果,考慮到去霧算法的應用場景,本文使用特征點數量對圖像的去霧效果進行評價,檢測到的特征點數量越多,則SLAM系統(tǒng)可用于建圖的信息越多、圖像去霧效果越好。
2.3 自適應去霧算法實驗結果
基于VisualStdio2010,驗證本文自適應去霧算法的去霧效果及算法與SLAM系統(tǒng)結合后的運算速度,使用的圖像來源于網絡,運行環(huán)境為Intel(R) Core(TM)i7-4900CPU@3.6 GHZ,4 G物理內存,64位win7系統(tǒng)。在運算速度方面,本文算法處理一幅800×600圖像平均耗時0.01 ms,將本文算法作為前端與所建立的運算速度為每秒30幀的SLAM系統(tǒng)結合后,系統(tǒng)的運算速度可達到每秒23幀,考慮到現(xiàn)有相機的幀數一般在20幀左右,因此本文算法可以基本滿足SLAM系統(tǒng)的實時性需求。
在去霧效果方面,使用本文算法、基于大氣散射模型的快速去霧算法[13]以及HE算法[7]分別對圖像進行了去霧處理,獲得的實驗結果如圖5所示。在實驗中,使用如下方式設定快速去霧算法和HE算法的去霧參數:隨機選取一幅實驗圖像,針對選定圖像設定合適的去霧參數。最終針對圖像2將快速去霧算法的去霧參數設定為1.21;針對圖像3將HE算法的去霧參數設定為0.67。對圖5(b)~圖5(d)進行比較可以看出,快速去霧算法在處理圖像1和圖像3時去霧效果較差;HE算法在處理圖像1和圖像2時去霧效果較差。而本文算法在處理3幅圖像時均獲得了較好的去霧效果。
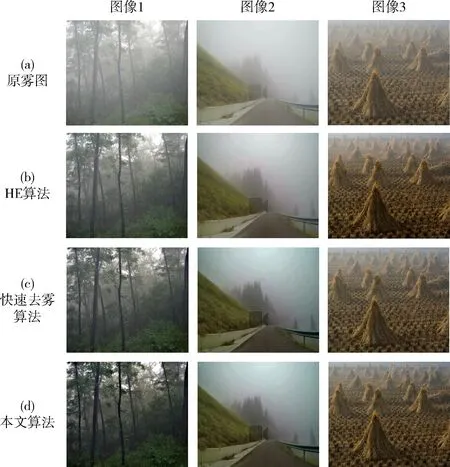
圖5 算法去霧后的效果
下面使用ORB算子分別對圖5中的去霧圖像進行特征點檢測,特征點檢測結果見表1。
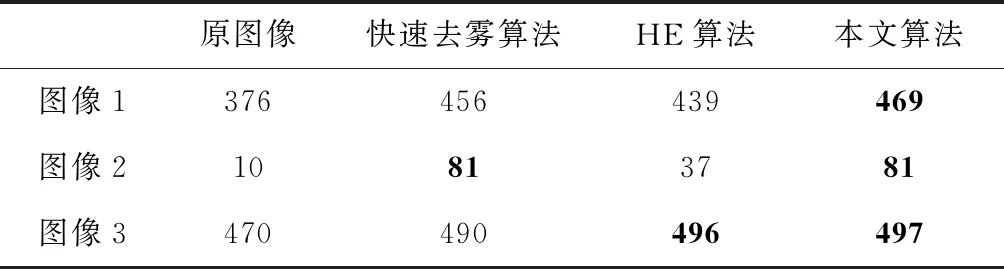
表1 去霧圖像有效特征點檢測結果
由表1和圖5可知,現(xiàn)有去霧算法一旦針對某幅圖像設置了去霧參數,就會導致算法對其它圖像的去霧效果不佳。相較而言,本文算法在面對不同霧濃度的圖像時可以獲得更好的去霧效果。
下面檢驗本文算法校正去霧參數的效率:使用本文算法將去霧參數γ的初值設定為0和2.5,以模擬霧濃度發(fā)生突變的情況。共對3個場景下的圖像進行了處理,并獲取了算法校正去霧參數γ所需要的圖像幀數,見表2。
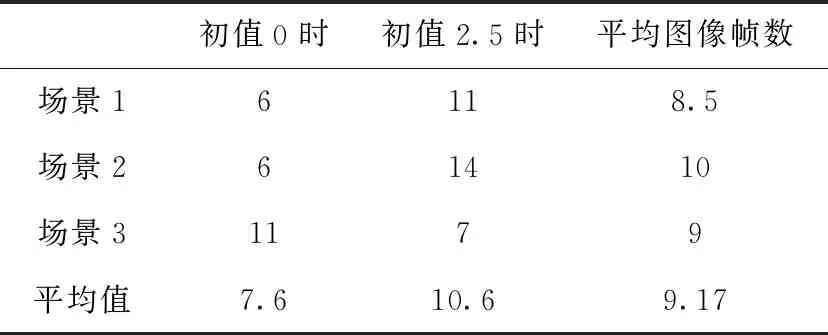
表2 參數校正實驗結果
由表2可知:在運算速度為每秒23幀的SLAM系統(tǒng)中,本文算法平均僅需9.17幀圖像即0.398 s的時間即可完成參數γ的自適應校正,說明本文算法可以快速適應不同霧濃度的環(huán)境。
3 基于自適應去霧算法的視覺SLAM系統(tǒng)
本章對采用了自適應去霧前端的改進SLAM系統(tǒng)進行了模擬實驗,驗證了其具有良好的魯棒性,實驗所用視頻來源于網絡。
3.1 改進視覺SLAM系統(tǒng)框架
使用自適應圖像去霧算法作為整個SLAM系統(tǒng)的前端,將霧化圖像還原為清晰圖像后再進行特征點提取及匹配等運算。SLAM系統(tǒng)框架如圖6所示。
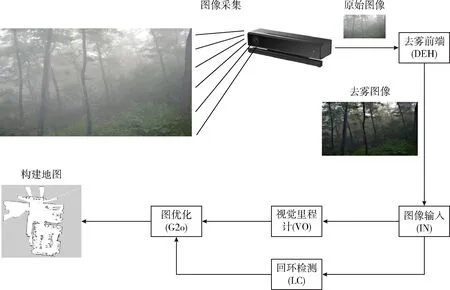
圖6 改進SLAM系統(tǒng)框架
3.2 模擬實驗結果
基于UBUNTU16.04操作系統(tǒng),對改進的視覺SLAM系統(tǒng)進行了模擬實驗,使用霧天環(huán)境下汽車行車記錄儀錄制的視頻,模擬視覺SLAM系統(tǒng)在該霧天環(huán)境下的運行,并以改進前的視覺SLAM系統(tǒng)為對照,隨機選取視頻中的一幀繪制了特征點匹配效果對比和運行結果對比,如圖7所示。
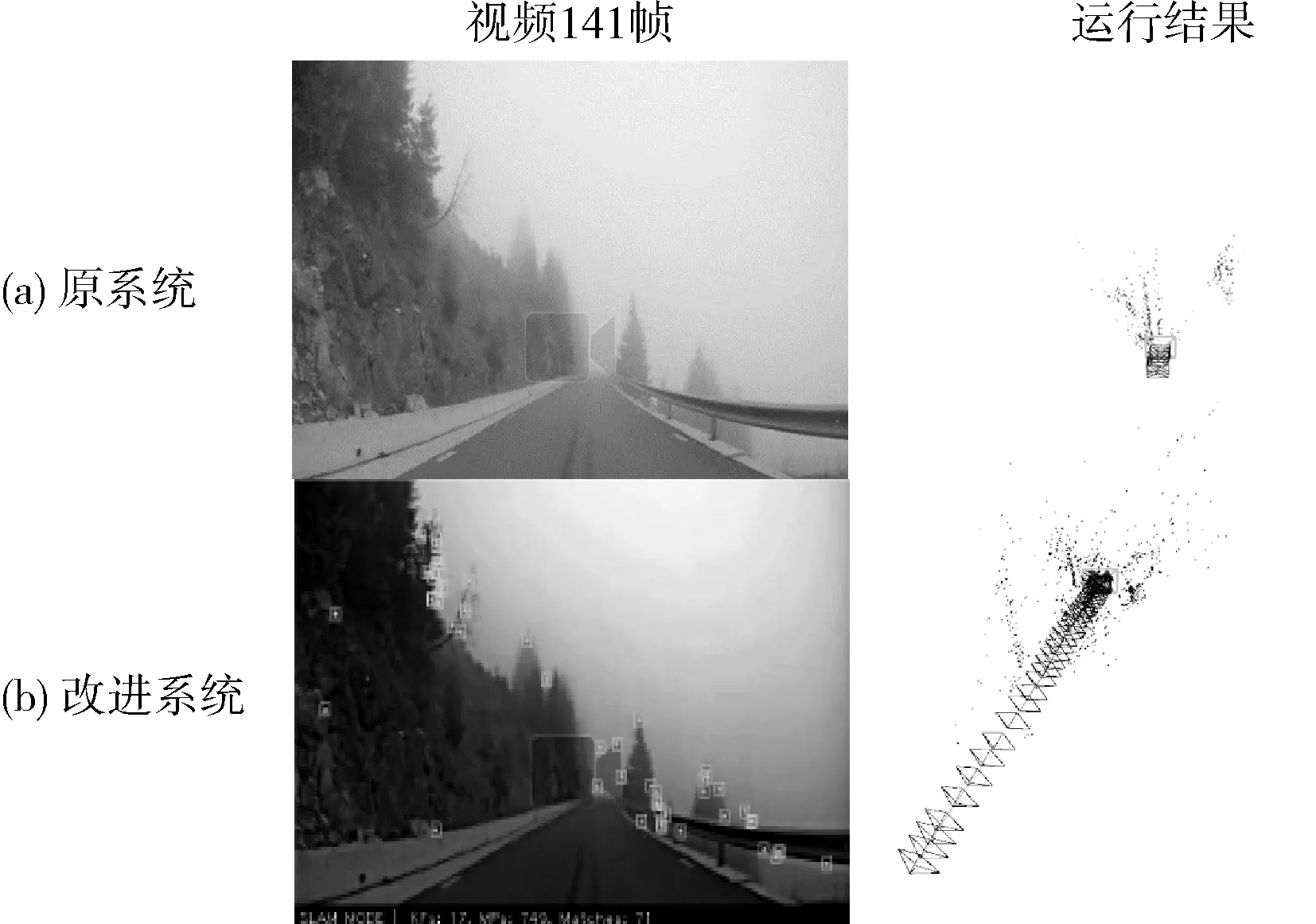
圖7 實驗結果對比
在實驗中,改進前系統(tǒng)在視頻116幀時成功建立初始地圖,但隨著相機的運動,由于無法將新的特征點加入到構建的地圖中,地圖無法隨相機視角的前移而進行拓展,SLAM系統(tǒng)無法繼續(xù)運行。改進的SLAM系統(tǒng)在111幀時成功建立初始地圖,由于可以連續(xù)檢測到足夠的特征點,直至視頻結束,SLAM系統(tǒng)都可以保持正常運行。這驗證改進的SLAM系統(tǒng)具有更好的魯棒性。
4 結束語
針對視覺SLAM算法在霧天環(huán)境下表現(xiàn)不佳的問題,本文提出了一種適用于視覺SLAM系統(tǒng)的自適應去霧算法,該算法根據反饋的去霧效果對去霧參數進行實時校正。相較于現(xiàn)有去霧算法,本文所提出的算法對未知霧濃度環(huán)境下的圖像具有更好的去霧效果。使用本文所提出的算法作為去霧前端后,視覺SLAM系統(tǒng)在模擬運行實驗中表現(xiàn)出了更好的魯棒性。
猜你喜歡
中老年保健(2021年12期)2021-11-30 02:58:01
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
中華詩詞(2018年11期)2018-03-26 06:41:34
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
Coco薇(2016年8期)2016-10-09 02:11:50