基于非結構嵌套網格技術的低空大動壓級間分離數值模擬
2020-10-13 08:40:38馬友林
導彈與航天運載技術 2020年5期
袁 亞,李 冬,馬友林,陳 皓,王 亮
(中國運載火箭技術研究院,北京,100076)
0 引 言
多級飛行器低空高速條件下的級間分離存在分離動壓高、前后體流場復雜、流場非定常效明顯等顯著特點。工程上一般利用采用定常的氣動參數作為插值表,采用彈道、分離等數學仿真對分離過程進行模擬,分析評估分離安全性。該方法可對大量的危險工況進行模擬,但該過程是將分離過程簡化為定常過程,無法考慮實時分離過程部件運動的非定常效應和多體運動的氣動干擾,且對分離過程預示不夠清晰、直觀。
近年來,隨著網格變形重構技術、嵌套網格技術等計算流體力學數值模擬方法的發展,對高速動態的級間分離運動進行實時的數值仿真和分析已具備條件。Peter 和Buning 等人在X-43A 項目級間分離研究中,使用結構嵌套網格技術對流場和6DOF 耦合計算,分析了分離力、飛行器舵偏規律對子級軌跡的影響,給出了CFD 計算的實時分離軌跡和依靠定常氣動力計算的彈道軌跡的差異,證明了CFD 計算在分離專業的重要性[1,2],X-43A 級間分離數值模擬見圖1。
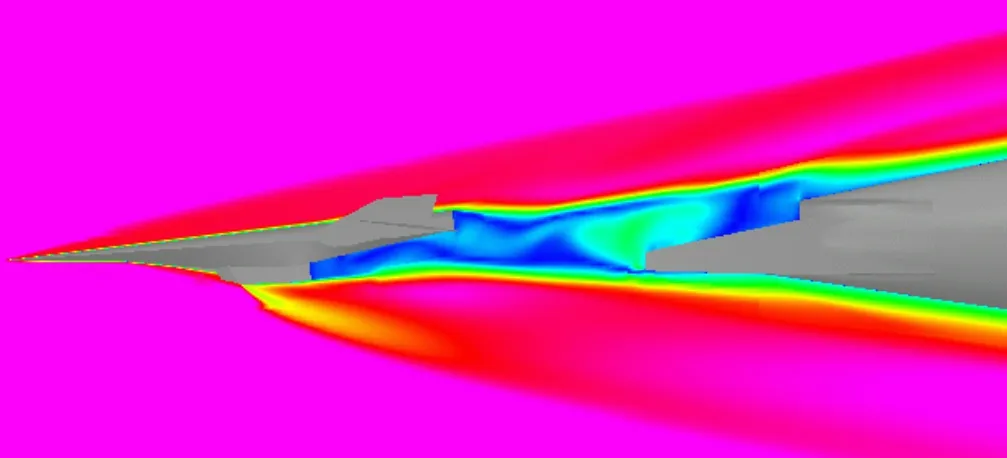
圖1 X-43A 級間分離數值模擬Fig.1 Numerical Simulation of Stage Separataion of X-43A
Li 等人采用德國宇航中心的TAU-Code 動態非結構重疊網格技術數值模擬了兩級火箭的級間熱分離過程,獲得了后體和上面級的俯仰、滾轉、偏航特性[3]。Chan 等人在研究載人飛船逃逸分離時采用動態結構嵌套網格技術計算了飛船在固體火箭推力、重力、控制力作用下的分離過程,具有較高的工程應用價值[4]。
針對低空大動壓條件下的級間分離過程,本文采用計算流體力學方法中的嵌套網格技術,對低空大動壓級間分離前后體的流場和運動特性進行模擬,為飛行器的級間分離總體方案設計和安全性評估提供支撐。
1 數值模擬
1.1 N-S 方程及離散方法
公式(1)給出了N-S 控制方程:

式中 W為守恒變量;cF 為對流通量矢量;vF 為粘性通量矢量;Q為源項;Ω 為控制體積,N-S方程離散、求解方法和過程較可參考相關文獻[5~8],本文不再贅述。
1.2 剛體運動方程
級間分離仿真中對前、后體運動進行建模,其運動方程如式(2)、式(3)所示。
式中 m為前、后體質量;F為作用在前后體上的氣動力、分離作用力等合外力;V為前、后體的速度矢量;M為剛體的轉動慣量張量;ω 為剛體運動的角速度矢量;N為剛體運動所受到的合力矩。
1.3 嵌套網格及求解技術
多體運動數值仿真的嵌套網格主要由背景網格及子嵌套網格組成,背景網格和子嵌套網格獨立生生成后進行組裝和拼接。計算過程中兩套網格采用網格挖洞、宿主搜尋、網格裝配等技術,實現背景網格和子網格的參數傳遞,詳細的計算過程可參考文獻[9]。
2 動態多面體網格嵌套技術驗證
為驗證本文數值模擬方法的正確性,選擇具有豐富的風洞試驗數據的機翼/掛架/帶舵外掛物(Wing/Pylon/Finned-Store,WPFS)模型進行數值模擬方法的校核。數值模擬的條件為:Ma=0.95,H=8 km,攻角0°,其他參數設置可參見文獻[10],該模型的網格如圖2 所示。
帶舵外掛物質心位移、速度的風洞試驗結果與數值模擬結果對比如圖3 所示。
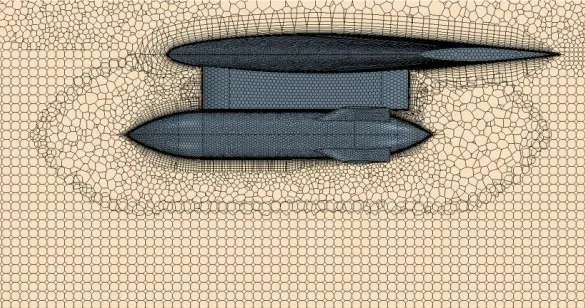
圖2 WPFS 嵌套網格Fig.2 Overset Unstructured Grid of WPFS
結果表明,基于嵌套網格的數值模擬結果與風洞實驗值變化趨勢和數值大小較為一致,分離體的軌跡預示可指導工程設計,采用嵌套網格數值模擬技術對多體分離運動進行分析的方法是可信的。
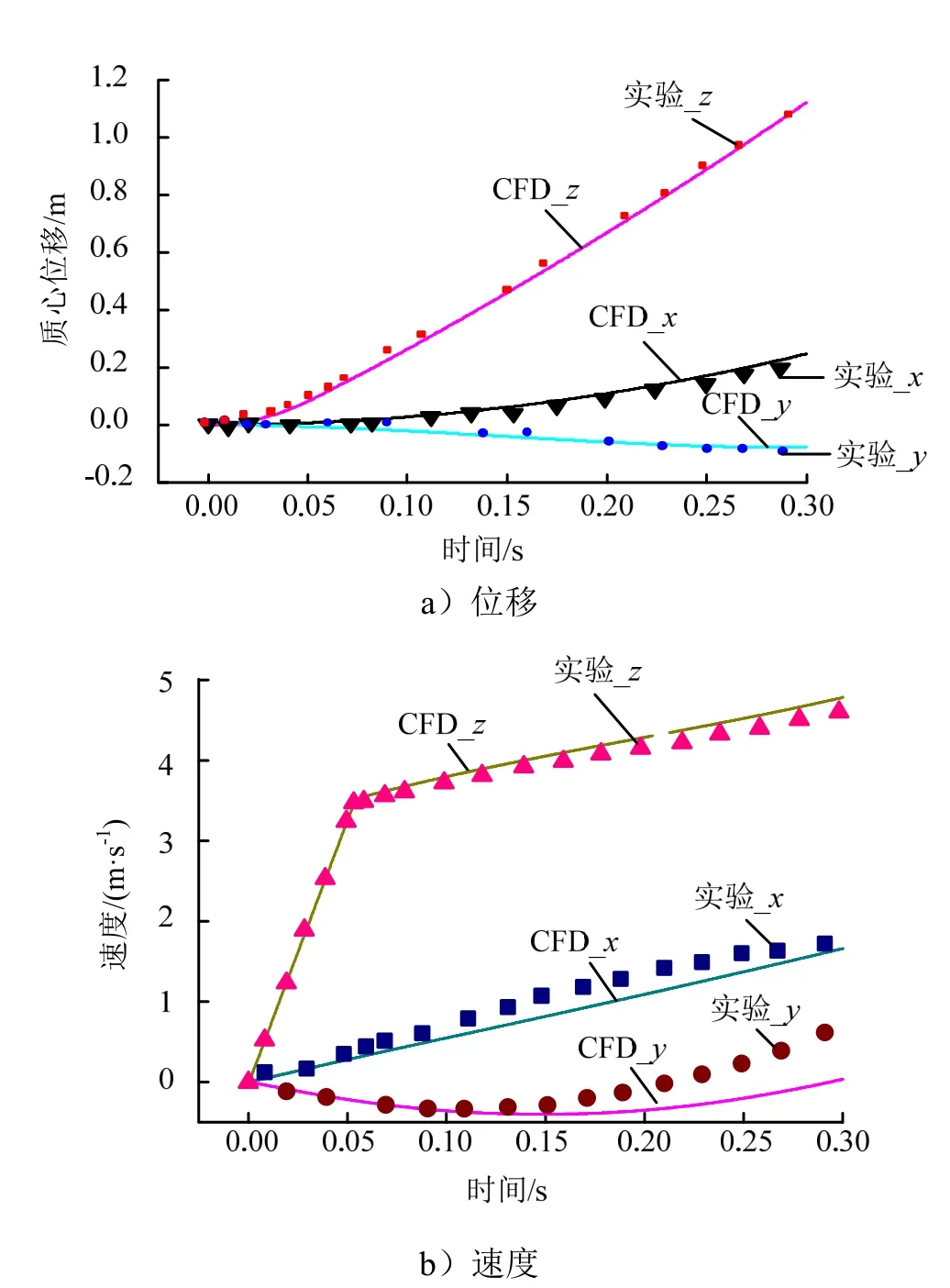
圖3 外掛物質心動態特性Fig.3 Dynamic Characteristics of Finned-Store
3 數值模擬機結果分析
3.1 級間分離網格系統
本文開展的級間分離數值模擬的前、后體嵌套網格系統詳見圖4。由圖4可知,采用背景網格、前體嵌套網格、后體嵌套模式,網格單元的總數量約為120萬個。數值模擬的時間步長Δt設置為0.00005 s[11],其余相關參數詳見表1。
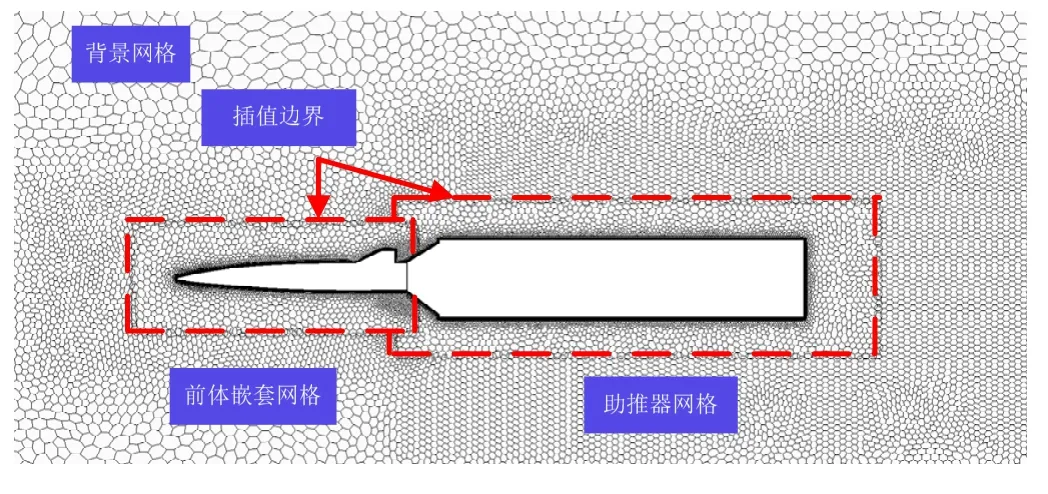
圖4 級間分離網格系統Fig.4 Stage Separation Grids

表1 級間分離條件Tab.1 Simulation Conditions of Stage Separation
3.2 發動機后效推力設置
當飛行器軸向加速度小于飛行時序諸元裝訂值時,開始執行級間分離時序,此時分離過程的后體發動機存在一定的后效推力,圖5 給出了本文算例中級間分離后發動機后效推力變化曲線。
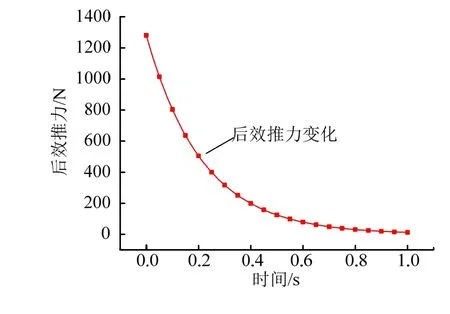
圖5 發動機后效推力曲線Fig.5 Engine After-effect Thrust Curve
3.3 級間分離數值模擬
3.3.1 初始流場特性分析
級間分離初始流場和受力大小如圖6 和表2 所示。
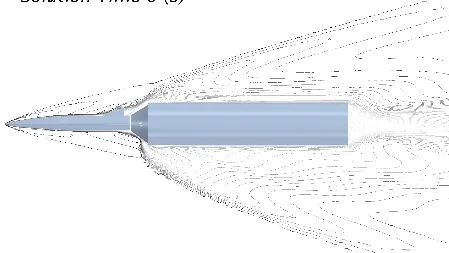
圖6 初始流場馬赫數云圖Fig.6 Mach Number in Initial Flow Field
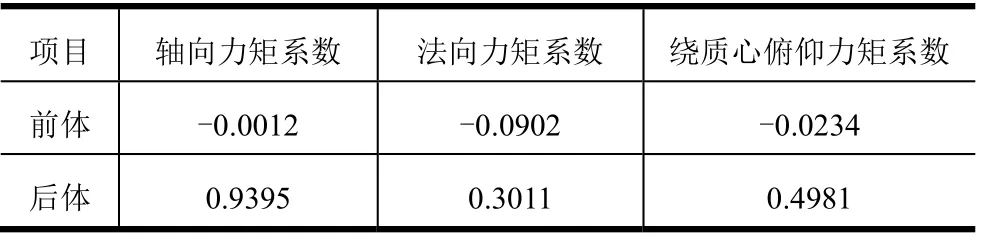
表2 初始狀態前后體受力情況Tab.2 The Force of Front and Rear Body in Initial Flow Field
復雜的異型級間段構形導致后體與高速來流形成多個壓縮面,在后體前部形成復雜的激波,后體氣動阻力較大;由于后體的前端外形的非對稱性,其前端上下受力不均衡,導致后體在分離開始時刻抬頭明顯。
3.3.2 動態運動特性
圖7 給出了前后體分離的運動軌跡圖。由于前后體存在較大加速度差,后體在氣動力的作用下安全分離,后體發動機的后效推力對分離過程影響較小,后體無前向運動,前后體在分離過程無碰撞和追撞危險。
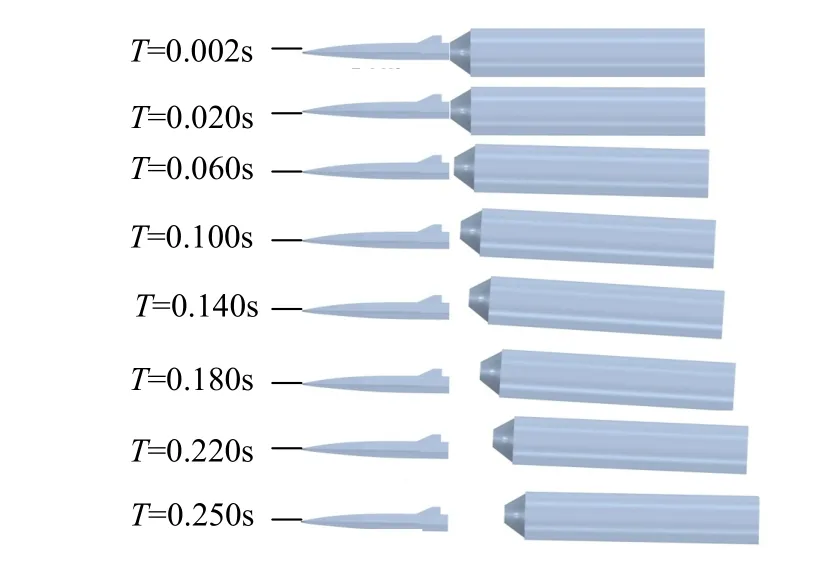
圖7 級間分離前、后體運動軌跡Fig.7 Trajectory of Stage Separation
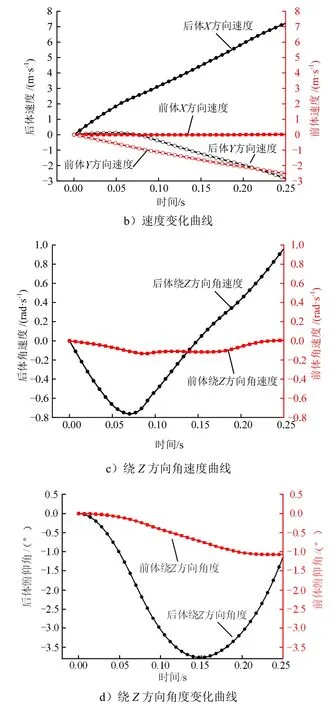
圖8 給出了前、后體分離過程質心的位移和速度曲線以及繞質心的角速度和角度曲線。
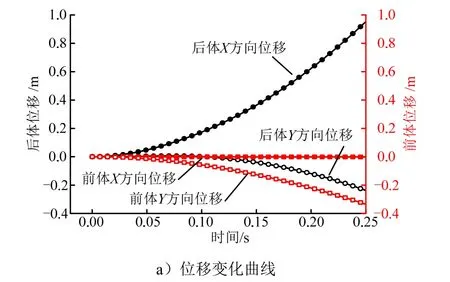
圖8 級間分離前、后體運動軌跡及運動學參數曲線Fig.8 Kinematic Parameters of Stage Separation
續圖8
由圖8 可知,分離過程后體的氣動阻力推動其快速分離,X 方向速度在分離結束時刻0.25 s 時已增加到7.21 m/s,X 方向位移增加到0.95 m。工程經驗認為,前、后體安全分離的標準為分離距離與前體底部直徑的比值至少大于2.5 倍,本文算例在分離末秒分離距離與前體底部直徑之比達到3 倍,前后體已經安全分離。分離過程后體和前體在氣動力作用下朝Y 負方向運動,仿真結束時后體與前體的Y負向的速度分別為2.83 m/s和2.53 m/s;分離過程后體抬頭角度最大僅為3.7°,抬頭運動未造成分離碰撞,但存在一定的風險[11]。
3.3.3 級間分離流場特性分析
圖9 給出了前體與后體的氣動力及力矩系數隨分離過程的變化曲線。分離開始后前體軸向力為負,且呈下降趨勢,說明前、后體級間流場對前體產生正推力,利于前體的分離遠離。相關文獻指出[11~13],隨著分離距離的加大,級間部分完全包裹在前體上下表面的剪切層之中,級間形成壓強大、速度低的回流區,主要對前體產生較小的推力,這種“后體效應”已經在各種風洞試驗中得到證實[14]。
圖9 級間分離過程前后體氣動力變化Fig.9 Aerodynamic of the Stage Separation
圖10 給出了分離過程流場馬赫數云圖。分離過程中后體逐漸淹沒于前體飛行器的尾流中,后體飛行器下部前端產生的強激波加速后體的抬頭趨勢,隨著抬頭角度增加,后體飛行器上部迎著來流,在上部也產生較大的強激波,該激波的作用力使后體飛行器有低頭趨勢,流場實時圖表明,在該仿真工況下,后體長期處于前體尾流中。
圖10 級間分離過程馬赫數云圖Fig.10 Mach Contour of the Separation Process
4 結 論
本文采用計算流體力學的動態嵌套網格技術對飛行器前后體的級間分離過程進行了數值模擬,模擬中考慮發動機后效作用、流體氣動力、重力的綜合作用,研究的主要內容和結論如下:
a)由于后體復雜的級間構型,其分離初始時刻氣動阻力較大,單純依靠后體的氣動阻力即可實現兩體安全分離;后體初始時刻及分離過程中存在抬頭運動,在分離設計中需重點關注。
b)在一定分離距離內,級間低速回流區產生“后體效應”,可推動前體分離運動,有利于前、后體安全分離。
c)基于非結構動態嵌套網格技術模擬級間分離能夠得到清晰、直觀的分離軌跡和分離姿態,可對危險的工況進行校核,具有較高的工程應用價值。