航天項(xiàng)目計(jì)劃緩沖區(qū)尺寸確定方法研究
2020-10-13 08:41:02張沁生趙長見程永欣
導(dǎo)彈與航天運(yùn)載技術(shù) 2020年5期
張沁生,趙長見,趙 蕊,李 璞,程永欣
(中國運(yùn)載火箭技術(shù)研究院,北京,100076)
0 引 言
新一代智能技術(shù)與航天技術(shù)的深度融合正在成為中國由航天大國走向航天強(qiáng)國的重要驅(qū)動(dòng),新一代項(xiàng)目管理智能信息化系統(tǒng)的發(fā)展也同步成為航天項(xiàng)目管理的熱點(diǎn)問題。
關(guān)鍵鏈法提供了一種新的項(xiàng)目管理方法,相對傳統(tǒng)關(guān)鍵路徑法(Critical Path Method,CPM)或計(jì)劃評審技術(shù)(Project Evaluation and Review Technique,PERT)的改進(jìn)點(diǎn)在于在約束理論基礎(chǔ)上實(shí)現(xiàn)了計(jì)劃與資源的緊密結(jié)合。歷經(jīng)20 余年的發(fā)展,其理論逐漸被引入實(shí)際應(yīng)用,但其先進(jìn)性仍主要體現(xiàn)在管理思想方面,許多重要理論方法在實(shí)際應(yīng)用中仍存在普適性不足的問題。
將關(guān)鍵鏈法應(yīng)用于新一代航天項(xiàng)目管理信息化系統(tǒng)中需要解決多方面的問題,包括航天多級(jí)計(jì)劃中哪幾級(jí)應(yīng)用關(guān)鍵鏈法、長周期型號(hào)項(xiàng)目緩沖區(qū)(項(xiàng)目緩沖、匯入緩沖、資源緩沖)設(shè)置問題、多項(xiàng)目計(jì)劃的智能優(yōu)化、多項(xiàng)目計(jì)劃智能再調(diào)度以及多項(xiàng)目計(jì)劃的魯棒性等一系列問題。所有問題的最基本元素是活動(dòng)的工期估計(jì)和各類緩沖區(qū)確定。
1 問題分析
1.1 航天項(xiàng)目科研生產(chǎn)活動(dòng)分類及特點(diǎn)
依據(jù)“研制程序”等行業(yè)規(guī)范,項(xiàng)目科研生產(chǎn)直接相關(guān)活動(dòng)主要分為:設(shè)計(jì)類(含技術(shù)創(chuàng)新與工藝創(chuàng)新)、產(chǎn)品生產(chǎn)類、試驗(yàn)類和驗(yàn)收評審類。通過分析歷年來部分型號(hào)項(xiàng)目的各類活動(dòng)完成工期,并與部分項(xiàng)目管理人員研究,總結(jié)了上述4 類活動(dòng)工期特點(diǎn):
a)設(shè)計(jì)類:工作分解結(jié)構(gòu)中各活動(dòng)由設(shè)計(jì)人員單獨(dú)或與其他設(shè)計(jì)人員協(xié)調(diào)完成。其不確定性較大,主要取決于技術(shù)難度、人員的水平、態(tài)度及人員間的相互配合程度。多型號(hào)的此類活動(dòng)實(shí)作工期數(shù)據(jù)統(tǒng)計(jì)分析顯示,完工工期基本呈正態(tài)分布或略左傾的正態(tài)分布。“帕金森法則”、“學(xué)生綜合癥”等確實(shí)在一定程度上影響著工作的完成。
b)生產(chǎn)類:各類活動(dòng)主要指各種產(chǎn)品或試驗(yàn)件的生產(chǎn),其活動(dòng)內(nèi)容及時(shí)間由生產(chǎn)工藝進(jìn)行規(guī)范,該類活動(dòng)的完工工期有一定的剛性。不確定性主要來源于生產(chǎn)準(zhǔn)備時(shí)間、人員操作熟練程度等。該類活動(dòng)的完工工期統(tǒng)計(jì)數(shù)據(jù)呈右傾較多的正態(tài)分布,或以對數(shù)正態(tài)分布擬合更為恰當(dāng)。
c)試驗(yàn)類:指利用試驗(yàn)設(shè)備、設(shè)施,按試驗(yàn)大綱規(guī)定完成試驗(yàn),取得各類試驗(yàn)參數(shù),供設(shè)計(jì)人員確定和調(diào)整設(shè)計(jì)狀態(tài)。其不確定性主要來源于操作人員、試驗(yàn)進(jìn)程是否符合預(yù)期等。不確定性介于設(shè)計(jì)類和生產(chǎn)類之間,完工工期統(tǒng)計(jì)數(shù)據(jù)呈現(xiàn)略右傾的正態(tài)分布。
d)驗(yàn)收評審類:經(jīng)對統(tǒng)計(jì)數(shù)據(jù)分析,該類活動(dòng)工期通常較短,確定性較高,可以將估計(jì)工期直接設(shè)置為計(jì)劃的執(zhí)行時(shí)間,不設(shè)置緩沖區(qū)。
主要類型活動(dòng)的完工工期概率密度如圖1所示(不包括評審驗(yàn)收類)。
1.2 緩沖區(qū)大小確定常用方法
關(guān)鍵鏈法緩沖區(qū)大小的確定通常采用“剪切-粘貼法”或“根方差法”。
“剪切-粘貼法”[1]由關(guān)鍵鏈法創(chuàng)始人Goldratt 提出,將活動(dòng)執(zhí)行時(shí)間設(shè)定為估計(jì)工期值的50%,將關(guān)鍵鏈或非關(guān)鍵鏈的各活動(dòng)工期剪去部分的1/2 作為安全時(shí)間,求和后直接放置在關(guān)鍵鏈尾或非關(guān)鍵鏈尾,作為項(xiàng)目緩沖(Project Buffer,PB)或匯入緩沖(Feeding Buffer,F(xiàn)B)。此方法自提出之日起就頗具爭議,文獻(xiàn)[2]~[6]從不同側(cè)面做了論述,項(xiàng)目緩沖、匯入緩沖都隨著計(jì)劃網(wǎng)絡(luò)復(fù)雜度增加和活動(dòng)數(shù)量增多而呈線性增長,與項(xiàng)目實(shí)際嚴(yán)重脫節(jié)。
根方差法[2]由Newbold 提出,主要目的是解決“剪切-粘貼法”緩沖區(qū)隨鏈上活動(dòng)線性增長問題。具體方法是以估計(jì)工期的50%作為執(zhí)行時(shí)間,將核減的時(shí)間作為安全時(shí)間σi,對關(guān)鍵鏈或非關(guān)鍵鏈上各活動(dòng)安全時(shí)間的平方和開平方,放置鏈尾形成項(xiàng)目緩沖PB 或匯入緩沖FB。其計(jì)算式為

林晶晶[3]認(rèn)為:根方差法提出的各活動(dòng)相對獨(dú)立的基本假設(shè)并不符合實(shí)際;張文靜等[4]認(rèn)為“根方差法”與“剪切粘貼法”一樣,都未考慮資源約束的松緊度。
1.3 航天項(xiàng)目緩沖區(qū)確定需解決的首要問題
a)執(zhí)行時(shí)間應(yīng)符合航天項(xiàng)目各類活動(dòng)工期分布
王雪青等[5]提出不應(yīng)簡單地將安全時(shí)間設(shè)定為估計(jì)工期的50%,緩沖區(qū)大小確定應(yīng)考慮人員、設(shè)備、技術(shù)、風(fēng)險(xiǎn)等因素的影響。蔡晨等[6]在三點(diǎn)估值法基礎(chǔ)上,設(shè)置彈性系數(shù)KB,通過KB計(jì)算安全時(shí)間。
航天項(xiàng)目3 類主要活動(dòng)呈現(xiàn)出不同的工期分布特征,統(tǒng)一以估計(jì)工期的50%劃分為執(zhí)行時(shí)間和安全時(shí)間不符合航天項(xiàng)目實(shí)際。上級(jí)計(jì)劃按此考核下級(jí)執(zhí)行單位,對生產(chǎn)類、試驗(yàn)類工作則過于嚴(yán)苛、失實(shí),不僅于任務(wù)完成無益,而且可能造成管理混亂。
b)多項(xiàng)目計(jì)劃的魯棒性問題
航天項(xiàng)目管理信息化系統(tǒng),安排著眾多的型號(hào)科研生產(chǎn)任務(wù),各型號(hào)、各項(xiàng)目的眾多活動(dòng)存在對同一資源的爭奪。為平衡競爭,在計(jì)劃制定之初就依據(jù)設(shè)定的各活動(dòng)工期進(jìn)行了多項(xiàng)目計(jì)劃的優(yōu)化與反復(fù)協(xié)調(diào)。在執(zhí)行過程中,如果由于活動(dòng)工期嚴(yán)重失準(zhǔn),導(dǎo)致前項(xiàng)計(jì)劃未按期完成,必然造成后續(xù)計(jì)劃節(jié)點(diǎn)的批量調(diào)整。如果此現(xiàn)象在眾多型號(hào)中普遍存在,必然造成多型號(hào)、多項(xiàng)目普遍進(jìn)行計(jì)劃的再調(diào)度和再優(yōu)化。計(jì)劃的大面積、頻繁變更不僅造成計(jì)算資源大幅浪費(fèi),也將導(dǎo)致系統(tǒng)失敗和項(xiàng)目管理失控。
面對上述問題,基于中心極限定理,忽略各活動(dòng)工期分布特征,將緩沖區(qū)大小建立在統(tǒng)一的正態(tài)分布基礎(chǔ)上,簡單地將各活動(dòng)估計(jì)工期的50%設(shè)定為安全時(shí)間顯然是不可行的。
為解決這一問題,需要尋找更為靈活、符合航天項(xiàng)目各類活動(dòng)實(shí)際完工工期分布特點(diǎn)的執(zhí)行工期、安全時(shí)間及緩沖區(qū)大小的確定方法。綜上,航天項(xiàng)目計(jì)劃緩沖區(qū)確定方法應(yīng)滿足下述基本條件:
a)活動(dòng)工期估計(jì)、執(zhí)行時(shí)間確定、緩沖區(qū)大小計(jì)算方法應(yīng)能夠利用活動(dòng)完工工期統(tǒng)計(jì)數(shù)據(jù)和經(jīng)驗(yàn),符合航天項(xiàng)目不同類型活動(dòng)的完工概率密度分布特征;
b)以新方法編制的關(guān)鍵鏈法計(jì)劃,不必追求項(xiàng)目紙面計(jì)劃的盡可能短,而應(yīng)為實(shí)際執(zhí)行計(jì)劃和多項(xiàng)目執(zhí)行計(jì)劃具有高魯棒性提供必要的基礎(chǔ);同時(shí),新方法計(jì)劃也應(yīng)體現(xiàn)關(guān)鍵鏈法的先進(jìn)思想。
2 緩沖區(qū)大小確定
2.1 基于模糊理論的執(zhí)行時(shí)間確定
項(xiàng)目工作分解結(jié)構(gòu)中任意一項(xiàng)活動(dòng)的執(zhí)行時(shí)間及安全時(shí)間都源于對該活動(dòng)的工期估計(jì)。活動(dòng)的工期估計(jì)一般由經(jīng)驗(yàn)豐富的項(xiàng)目管理人員依據(jù)經(jīng)驗(yàn)主觀估計(jì),不可避免地具有模糊性。將模糊數(shù)學(xué)引入活動(dòng)工期估計(jì),能較貼切地描述和處理這種模糊性。
2.1.1 模糊數(shù)簡介
模糊數(shù)學(xué)基本理論將模糊數(shù)定義為一個(gè)連續(xù)的模糊集合[7,8]。描述活動(dòng)工期通常采用梯形模糊數(shù)和三角形模糊數(shù),梯形模糊數(shù)形式如圖2 所示。

圖2 梯形模糊數(shù)Fig.2 Trapezoidal Fuzzy Number
梯形模糊數(shù)(a,b,c,d)的隸屬函數(shù)表達(dá)式為

式中 μ(t) 為隸屬函數(shù);t 為活動(dòng)執(zhí)時(shí)間。
2.1.2 一致指數(shù)
一致指數(shù)最早由Gupta 和Kaufmand[9]提出,被用來評價(jià)兩個(gè)模糊事件的一致程度。其實(shí)際含義為描述模糊事件A 有多大比例分布在事件B 的區(qū)間中。兩個(gè)事件A、B 的一致指數(shù)AI(A,B)面積表達(dá)式為

式中 μ(A∩B)為模糊數(shù)A 與模糊數(shù)B 交集的隸屬函數(shù);μ(A)為模糊數(shù)A 的隸屬函數(shù)。
一致指數(shù)AI(A,B)指標(biāo)的面積表示如圖3 所示。設(shè)定項(xiàng)目工作分解結(jié)構(gòu)中某一活動(dòng)A(事件A)的工期估計(jì)為梯形模糊數(shù)(a,b,c,d);同時(shí)假定事件B 的模糊數(shù)為(0,0, th, th),則Area(A ∩ B)為圖中陰影部分的面積,一致指數(shù)AI(A,B)為陰影部分面積除以梯形(a,b,c,d)的面積。

圖3 一致指數(shù)的含義Fig.3 The Meaning of the High Agreement Index
性質(zhì)1:0≤AI(A,B)≤1
性質(zhì)2:AI(A,B)= f ( th)
2.1.3 執(zhí)行工期確定
將梯形模糊數(shù)引入項(xiàng)目活動(dòng)工期估計(jì),梯形模糊數(shù)(a,b,c,d)對應(yīng)的完工可能性如表1 所示。
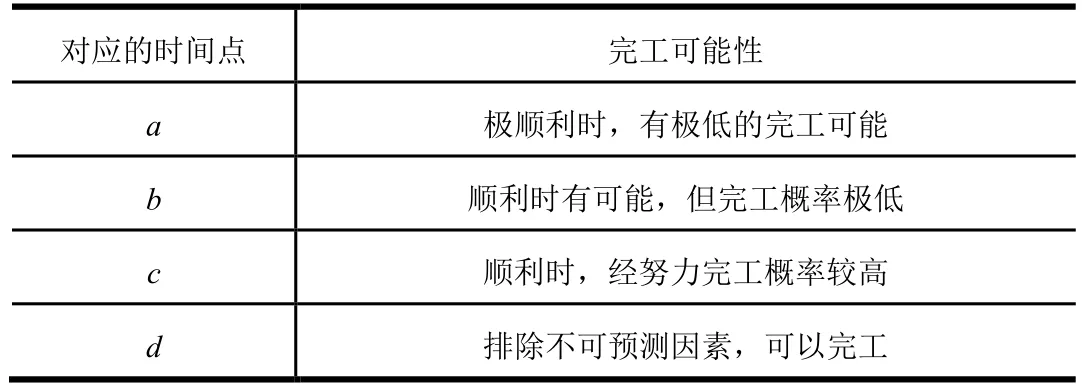
表1 梯形模糊數(shù)表示的完工可能性Tab.1 Probability of Task Completion Indicated by Trapezoidal Fuzzy Number
梯形模糊數(shù)b,c 取值相等時(shí),就轉(zhuǎn)化為三角形模糊數(shù),因此“三點(diǎn)法”可以看作“梯形模糊數(shù)法”的一個(gè)特例。
工期估計(jì)的四點(diǎn)分布需結(jié)合歷史經(jīng)驗(yàn)、活動(dòng)類型、技術(shù)成熟度、活動(dòng)不確定性等因素,應(yīng)體現(xiàn)被評估活動(dòng)完工概率密度的基本特征。
在文獻(xiàn)[9]~[10]的基礎(chǔ)上得出以下定義:
一致指數(shù)AI(A,B)反映的是:在 th時(shí)刻活動(dòng)A的完工概率。若令h=AI(A,B),此時(shí) th為完工概率為h 時(shí)活動(dòng)A 的執(zhí)行時(shí)間,稱h 為活動(dòng)A 的真度值。
由表1 可知,活動(dòng)的執(zhí)行時(shí)間th取值范圍僅應(yīng)在(b,c)或(c,d)區(qū)間內(nèi)。
由假設(shè)條件及式(3),可推導(dǎo)出:
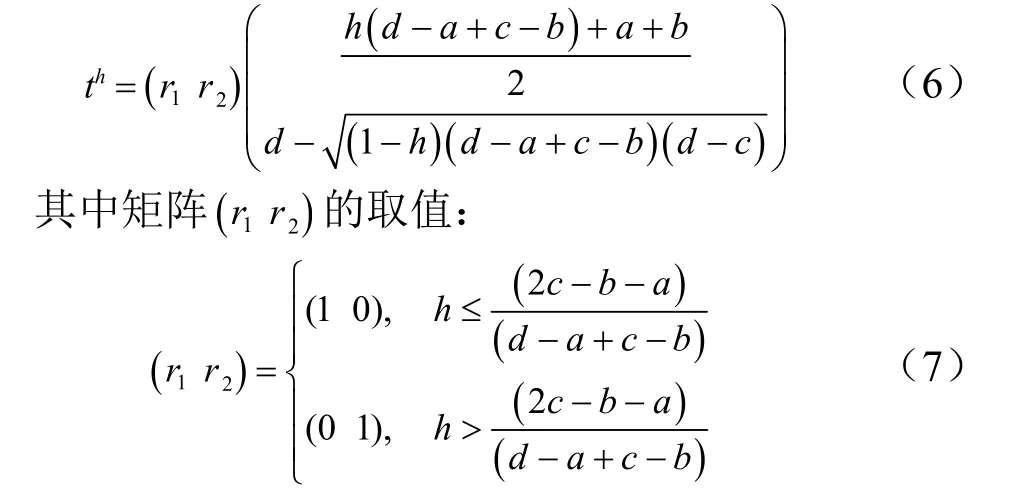
活動(dòng)執(zhí)行工期的分類計(jì)算:
a)新技術(shù)(新工藝)開發(fā)或應(yīng)用等類型活動(dòng):主要?dú)w類為設(shè)計(jì)類活動(dòng),真度值h 取50%,活動(dòng)執(zhí)行時(shí)間可取t50%;
b)試驗(yàn)等類活動(dòng):真度值h 取55%,活動(dòng)執(zhí)行時(shí)間取t55%;
c)生產(chǎn)等類活動(dòng):真度值h 取60%,活動(dòng)執(zhí)行時(shí)間取t60%。
驗(yàn)收評審類工作與其它類型活動(dòng)相比,通常時(shí)間較短,可以將估計(jì)工期作為執(zhí)行時(shí)間,不設(shè)定安全時(shí)間裕量,不計(jì)入緩沖區(qū)。
本文僅基于部分統(tǒng)計(jì)數(shù)據(jù)和經(jīng)驗(yàn)總結(jié),對有關(guān)類型活動(dòng)真度值h 選取給出概略性建議。更合理、準(zhǔn)確的選取值有待大量各類活動(dòng)實(shí)際執(zhí)行時(shí)間的積累和分析。項(xiàng)目管理人員可依據(jù)經(jīng)驗(yàn)、歷史數(shù)據(jù)積累以及具體活動(dòng)的不同特點(diǎn)等選取具體活動(dòng)的真度值h。
通過真度值h 的調(diào)整,項(xiàng)目管理人員能靈活地應(yīng)用活動(dòng)的完工概率積累數(shù)據(jù),確定活動(dòng)的執(zhí)行時(shí)間th,從而使計(jì)劃更符合實(shí)際,有利于提高實(shí)際執(zhí)行計(jì)劃的魯棒性。
2.2 緩沖區(qū)大小計(jì)算
2.2.1 安全時(shí)間裕量與風(fēng)險(xiǎn)因素
活動(dòng)的安全時(shí)間裕量:

式中si為活動(dòng)i 的安全時(shí)間裕量; di為活動(dòng)i 估計(jì)工期的最大值; thi為活動(dòng)i 的執(zhí)行時(shí)間。
決定緩沖區(qū)大小的因素除安全時(shí)間裕量外,還有影響各活動(dòng)執(zhí)行的風(fēng)險(xiǎn)因素,主要有資源不確定性(αi)、網(wǎng)絡(luò)活動(dòng)復(fù)雜度(βi)、技術(shù)不確定性(δi)及環(huán)境不確定性等。
資源不確定性是指被評估活動(dòng)所需資源(人力、設(shè)備及設(shè)施等可更新資源)的保障程度,其評價(jià)指標(biāo)多以資源緊張度(αi)表示[3]。
網(wǎng)絡(luò)活動(dòng)復(fù)雜度是指:距離項(xiàng)目開始時(shí)間越遠(yuǎn)的活動(dòng),其工期估計(jì)的不確定性越大。其評價(jià)指標(biāo)以網(wǎng)絡(luò)活動(dòng)復(fù)雜度(βi)表示[3]。
技術(shù)不確定性:活動(dòng)包含新技術(shù)開發(fā)或應(yīng)用,理論的成熟性、新技術(shù)的實(shí)現(xiàn)途徑、作用機(jī)理、對環(huán)境的適應(yīng)性以及應(yīng)用結(jié)果等都會(huì)對活動(dòng)完成時(shí)間造成較大的影響。為定量化表示技術(shù)不確定性,部分研究采用了層次分析法。該方法的評價(jià)指標(biāo)打分、權(quán)重的確定是主觀的,計(jì)算過程也相對較多。本文采用經(jīng)驗(yàn)設(shè)定,即參照其他項(xiàng)目歷史數(shù)據(jù),對特定的活動(dòng)可設(shè)定技術(shù)不確定性系數(shù)(δi)為0.2~0.5 的一個(gè)經(jīng)驗(yàn)系數(shù)。
環(huán)境的不確定性,是指用戶要求、項(xiàng)目實(shí)施環(huán)境變化等對活動(dòng)的影響,具有不可預(yù)測性,一般采用臨時(shí)應(yīng)對措施,不在緩沖區(qū)計(jì)算中考慮。
2.2.2 緩沖區(qū)大小計(jì)算
確定緩沖區(qū)大小的步驟是:a)計(jì)算各活動(dòng)執(zhí)行時(shí)間;b)依據(jù)緊前、緊后關(guān)系,結(jié)合資源約束繪制網(wǎng)絡(luò)圖,確定關(guān)鍵鏈、非關(guān)鍵鏈;c)確定插入?yún)R入緩沖及項(xiàng)目緩沖的位置;d)計(jì)算項(xiàng)目緩沖PB 及匯入緩沖FB。
綜合各風(fēng)險(xiǎn)因素影響,項(xiàng)目緩沖與匯入緩沖大小的計(jì)算公式為

式中 PB 為項(xiàng)目緩沖;i 為關(guān)鍵鏈上所有活動(dòng)(1,2,3…,i,…,n-1,n)的第i 項(xiàng);n 為關(guān)鍵鏈上所有活動(dòng)的最后一項(xiàng);αi,βi,δi和si分別為關(guān)鍵鏈上第i 項(xiàng)活動(dòng)的資源緊張度、網(wǎng)絡(luò)活動(dòng)復(fù)雜度、技術(shù)不確定性系數(shù)和安全時(shí)間裕量;FB 為匯入緩沖;j 為某一非關(guān)鍵鏈上所有活動(dòng)(1,2,3…,j,…,m-1,m)的第j 項(xiàng);m 為某一非關(guān)鍵鏈上所有活動(dòng)的最后一項(xiàng);αj,βj,δj和sj分別表示此非關(guān)鍵鏈上第j 項(xiàng)活動(dòng)的資源緊張度、網(wǎng)絡(luò)活動(dòng)復(fù)雜度、技術(shù)不確定性系數(shù)和安全時(shí)間裕量。
2.3 緩沖的檢驗(yàn)與調(diào)整
非關(guān)鍵鏈匯入關(guān)鍵鏈如圖4 所示。

圖4 非關(guān)鍵鏈匯入關(guān)鍵鏈?zhǔn)疽釬ig.4 Schematic Diagram of Non Critical Chain and Critical Chain
將關(guān)鍵鏈各項(xiàng)活動(dòng)及項(xiàng)目緩沖向右靠齊,非關(guān)鍵鏈各項(xiàng)活動(dòng)向左靠齊;匯入緩沖的大小須滿足:

式中 FBmn為非關(guān)鍵鏈活動(dòng)(i~m)的匯入緩沖;FFm為非關(guān)鍵鏈上最后一個(gè)活動(dòng)m 的自由時(shí)差;LFn為關(guān)鍵鏈上活動(dòng)n 的最晚結(jié)束時(shí)間;EFm為非關(guān)鍵鏈上活動(dòng)m的最早結(jié)束時(shí)間。
若不滿足式(11)要求,則令 FBmn=FFm;否則此匯入緩沖將導(dǎo)致關(guān)鍵變更和項(xiàng)目完工時(shí)間推遲。
3 算例
3.1 項(xiàng)目基本信息
算例網(wǎng)絡(luò)圖如圖5 所示。

圖5 算例網(wǎng)絡(luò)Fig.5 Network Graph of the Example
算例的工作內(nèi)容、資源、工期估計(jì)如表2 所示。

表2 算例基本信息Tab.2 Basic Information of the Example
其關(guān)鍵路徑為B-C-F-H-I,以活動(dòng)估計(jì)工期的期望值為執(zhí)行工期,關(guān)鍵路徑法求得的算例項(xiàng)目總工期為70.17 個(gè)時(shí)間單位。此關(guān)鍵路徑未考慮活動(dòng)C 與活動(dòng)D的資源沖突,實(shí)際此關(guān)鍵路徑不可執(zhí)行。
3.2 緩沖區(qū)尺寸計(jì)算
不同方法計(jì)算所得各活動(dòng)執(zhí)行時(shí)間、安全時(shí)間裕量具體數(shù)值如表3 所示。

表3 各活動(dòng)執(zhí)行時(shí)間、安全時(shí)間裕量Tab.3 Execution Time and Safety Allowance of Activities
對比表3 中活動(dòng)F、G、H 有關(guān)數(shù)據(jù)可見:當(dāng)活動(dòng)的估值范圍(d~a)較大且不屬于正態(tài)分布時(shí),本文方法計(jì)算所得活動(dòng)的執(zhí)行時(shí)間、標(biāo)準(zhǔn)差明顯不同于其他兩種方法的計(jì)算值。其原因在于其他兩種方法不考慮數(shù)據(jù)的分布特征。
算例中,由于活動(dòng)C 與活動(dòng)D 存在資源使用沖突,原并行執(zhí)行關(guān)系轉(zhuǎn)為了串行執(zhí)行關(guān)系。以資源需求、供給為依據(jù),根據(jù)活動(dòng)的緊前關(guān)系、活動(dòng)的執(zhí)行時(shí)間,可尋得關(guān)鍵鏈與非關(guān)鍵鏈。此算例3 種不同計(jì)算方法所得關(guān)鍵鏈均相同,其甘特圖如圖6 所示,關(guān)鍵鏈為A-D-C-F-H-I,非關(guān)鍵鏈為B 及E-G。

圖6 算例關(guān)鍵鏈法甘特圖Fig.6 Gantt Chart of the Example Based on Critical Chain
不同方法計(jì)算所得項(xiàng)目緩沖PB、匯入緩沖FB1、FB2以及項(xiàng)目完工時(shí)間如表4 所示。

表4 不同方法計(jì)算所得緩沖區(qū)大小及完工時(shí)間Tab.4 Buffer Size and Completion Time Calculated by Different Methods
由表4 可知,3 種方法計(jì)算所得項(xiàng)目完工時(shí)間差別不顯著,最大差距也僅為0.93 個(gè)時(shí)間單位;因此,本文所列方法既實(shí)現(xiàn)了關(guān)鍵鏈法的先進(jìn)思想,也借助于真度值h 的靈活調(diào)整,使項(xiàng)目的各活動(dòng)執(zhí)行時(shí)間及各類緩沖區(qū)更符合實(shí)際。
3.3 完工時(shí)間模擬
本文應(yīng)用Crystal Ball 軟件,以各活動(dòng)估計(jì)工期的概率密度為輸入假設(shè),進(jìn)行算例完工時(shí)間模擬。
算例執(zhí)行計(jì)劃網(wǎng)絡(luò)如圖7 所示。由于資源約束,活動(dòng)C 與活動(dòng)D 之間增加了約束關(guān)系。

圖7 算例關(guān)鍵鏈法計(jì)劃網(wǎng)絡(luò)Fig.7 Network Graph of the Example Based on Critical Chain
非關(guān)鍵鏈匯入關(guān)鍵鏈共有兩個(gè)結(jié)點(diǎn),由于輸入數(shù)據(jù)為滿足一定概率分布特征的隨機(jī)數(shù),故模擬過程中其緊后活動(dòng)須滿足限制條件式(13):

式中 ESC、ESI為關(guān)鍵鏈被匯入點(diǎn)緊后活動(dòng)C、I 的最早開始時(shí)間;LFB、LFD分別為匯入節(jié)點(diǎn)緊前活動(dòng)B、D的最晚結(jié)束時(shí)間;LFG、LFH分別為匯入節(jié)點(diǎn)緊前活動(dòng)G、H 的最晚結(jié)束時(shí)間。模擬結(jié)果如圖8、圖9 所示。模擬結(jié)果顯示:確定性為90%、95%時(shí),項(xiàng)目完工時(shí)間分別為85.5、87.61 個(gè)時(shí)間單位。采用本文計(jì)算方法所得項(xiàng)目完工時(shí)間按計(jì)劃完工的確定性達(dá)到90%,體現(xiàn)了關(guān)鍵鏈法的先進(jìn)思想和作用。

圖8 完工時(shí)間模擬頻率視圖Fig.8 Simulation Frequency of Completion Time

圖9 完工時(shí)間累計(jì)頻率視圖Fig.9 Accumulation Frequency of Completion Time
4 結(jié) 論
a)將模糊數(shù)學(xué)引入活動(dòng)工期估計(jì),能較貼切地描述和處理工期估計(jì)的模糊性;同時(shí)采用梯形模糊數(shù)進(jìn)行工期估計(jì),也能體現(xiàn)航天項(xiàng)目不同類型活動(dòng)的工期分布特征。
b)本文方法改變了僵化的執(zhí)行時(shí)間確定方法,以不同真度值h 下的可靠工期th作為活動(dòng)執(zhí)行工期,有堅(jiān)實(shí)的理論支撐。
c)項(xiàng)目管理人員可以充分利用人員經(jīng)驗(yàn)和工期統(tǒng)計(jì)數(shù)據(jù)概率分布等知識(shí),通過真度值h 取值的調(diào)整恰當(dāng)?shù)卮_定活動(dòng)執(zhí)行時(shí)間th、安全時(shí)間及緩沖區(qū)大小,從而使得編制的計(jì)劃更加符合實(shí)際。
d)通過仿真模擬,應(yīng)用該方法確定的緩沖區(qū)大小與項(xiàng)目計(jì)劃,計(jì)劃完工確定性可以達(dá)到較高水平,體現(xiàn)了關(guān)鍵鏈法的先進(jìn)思想。
綜上,本文提出的緩沖區(qū)大小確定方法,實(shí)現(xiàn)了初始設(shè)定的目標(biāo),具有一定的實(shí)用價(jià)值。
猜你喜歡
少先隊(duì)活動(dòng)(2022年5期)2022-06-06 03:45:04
家庭科學(xué)·新健康(2022年3期)2022-05-10 00:32:13
中老年保健(2021年2期)2021-08-22 07:31:10
中學(xué)生數(shù)理化(高中版.高考理化)(2021年6期)2021-07-28 06:21:04
少先隊(duì)活動(dòng)(2021年1期)2021-03-29 05:26:36
快樂語文(2020年30期)2021-01-14 01:05:38
人大建設(shè)(2019年9期)2019-12-27 09:06:30
海峽姐妹(2018年3期)2018-05-09 08:20:40
NBA特刊(2014年7期)2014-04-29 00:44:03
中國商人(2013年1期)2013-12-04 08:52:52