高層建筑核心筒大型鋼模板施工專項技術
2020-10-13 03:38:48楊賀龍
建材與裝飾 2020年28期
楊賀龍
(中交第四公路工程局有限公司,北京 100010)
0 引言
在高層建筑工程之中使用核心筒大型鋼模板施工專項技術,可以以其較快的速度和簡單的操作,提高高空作業的效率,此外,通過簡單的結構設計和穩定性的操作,可以提高工程實施過程中的質量和安全性。在一般情況下,實施完成核心筒大型鋼模板施工專項技術的爬模架組裝作業,需要持續到頂部,保證其不落地,從而減少在作業實施環節的模板受到損壞以及占用地面面積的現象,進一步增加模板的再利用次數。
1 核心筒大型鋼模板施工爬模的技術特點
(1)在預警器中設計預警值的時候,需要通過使用爬模自身最大的受力情況以及傳感器的受力變形情況作為依據。另外,在設計完成預警值以后,保證數值能夠在受力前提最大化的范圍之內,確保整個工程項目施工進度穩步開展,同時要提高液壓爬模安全性和穩定性。
(2)有機結合預警裝置和液壓爬模裝置,將其組合形成一個整體,加快實現提高預警裝置和液壓爬模裝置的一體化進程,同時可以有效避免安裝的反復性,提高安裝質量和效率。綜合使用預警裝置和爬模技術完成核心筒大型鋼模板施工,這在國內是前所未有的,施工技術極具實用性和創新性。
(3)布置預警裝置的間隔時,需要以爬模的受力爬錐的分布狀況作為依據展開,必須在核心筒的四個大角位置、空洞的旁邊、核心筒內部的承載布料機爬模的所有爬錐位置都完成布置工作,從而實現在核心筒大型鋼模板施工中監控的全面性和多角度,實現無漏洞監管控制[1]。
(4)加快優化傳感器的結構形式,由此一來,既能夠達到結構受力的基本要求,又可以降低成本支出,保證工程施工環節與流程便利。使用傳感器,最主要的目標還是加快實現將爬模承重銷進行取代的目的,傳感器作為在傳遞爬模受力環節時最具有關鍵性作用的構件,它同時兼具傳遞信號和轉換信號的作用。當受力以及變形的要求達到以后,需要安裝設置爬模掛座連接口,從而加大傳感器的強度,進而更加確保在使用爬模的時候其穩定性與安全性。
2 設計頂升模架體系的要點分析
2.1 分析設計支撐系統與頂升系統
支撐系統與頂升系統可以組合形成支撐頂升系統,其中支撐系統的主要組成部分為實現支撐功能的立柱以及在立柱上的支腿,將桁架與立柱內管實施連接,同時要連接完成支腿和立柱外管。在其頂升的位置需要安裝設計同步控制系統與長行程的頂升油缸,主立柱的基本構造形式如圖1 所示。
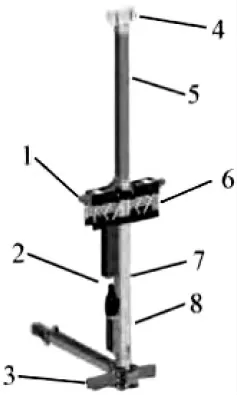
圖1 支撐系統主立柱的基本構造形式
將主立柱的詳細結構展開剖析,其平面布置圖詳細如圖2 所示。
2.2 分析與設計鋼桁架平臺系統
核心筒鋼桁架平臺系統在設計的時候,需要有高度和榀的要求,為了方便工程實施,在布置主桁架和次桁架的時候,應該在兩者之間提前預留一定的空間,同時在連接交叉位置的時候,可以通過利用桁架連接器得以實現,詳細的連接方式如圖3 所示。
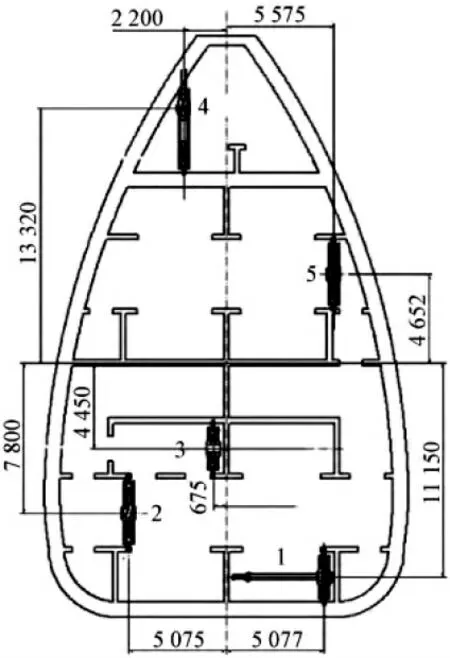
圖2 主立柱的平面結構布置

圖3 頂升桁架系統的連接
在外架與核心筒的墻體位置中間需要提前預留大約60cm的空間,預留的主要目的是在后期的拆除與清理過程中,方便操作。
2.3 分析與設計模板系統
安裝與頂模體系之中的模板系統,在設計的時候需要通過使用拼裝式全鋼大模板實現。在使用全鋼大模板的時候,需要滿足其參數要求。首先是厚鋼板的厚度,必須要維系在5mm。其次其高度要達到4500mm。最后,其寬度應該分別達到1500mm、1200mm、900mm、600mm 和 300mm。設計 5 排模板背楞,在使用過程中選擇兩個10 號的槽鋼,豎肋所使用的槽鋼為8 號,將其間距和控制300mm。在設計模板系統的時候,要盡可能實現通用,從而更進一步達到經濟性、適用性和安全性[2]。
3 工藝操作的基本要點探究
3.1 安裝傳感器
首先要分析傳感器的受力情況,將爬模承重的插銷替換成為具有預警能力的傳感器。當其在使用的過程中,將會受到彎矩和豎向力的影響。在實施爬模作業的時候,通過利用防傾覆支腿將傾覆彎矩產生的力予以抵消。
其次在傳感器的安裝使用之前,要及時組織開展校對和驗收工作。由于安裝傳感器需要與爬模施工兩者之間相互結合,為了規避在完成安裝傳感器以及爬模爬升以后出現不良問題,在正式實施安裝之前,必須要完成校核工作。
再次將使用的液壓爬模承重銷替換成為傳感器,在完成安裝液壓爬模橫梁勾頭以后,需要在勾頭的插孔內部完成傳感器的安裝工作。
之后安裝傳感器和爬模掛座時,要進行定位,同時在完成安裝以后要將其固定住,保證安裝過程中能夠精準找到位置,并且保證在施工環節中不會出現偏轉的現象,使傳感器始終處于最佳的受力狀態。
最后完成傳感器的安裝以后,傳感器設備的管理人員要在最短的時間內完成檢查工作,同時要及時展開監測數據的操作,倘若出現位移或者是偏轉現象,那么便要及時矯正。
3.2 設計與安裝專用三級箱
在預警系統中所用的為專用三級箱,這種箱子的使用要求是無論出現何種情況,都不能夠占據使用,除非在爬模爬升的時候出現斷電現象,在其他任何時候,都必須要時刻保持持續通電的狀態。
安裝三級箱的位置并非隨意,而是要將其在液壓爬模下架位置的防護網立桿位置實施安裝,通過使用電焊將爬模的走道板與三級箱的支撐腳做好嚴格的固定,堅決不能出現移動。
3.3 爬模體系的防傾防墜措施
在實施爬模體系的時候,要保證其處于禁止的狀態,通過使用防傾調節支腿以及掛座等措施,盡可能確保整個架體始終處于垂直的狀態之下,通過利用爬模堆料平臺荷載垂直傳遞,使其不會在使用過程中出現傾覆力以及側向力等問題。在爬模爬升的過程當中,導軌和防墜爬升器兩者是處于相互運動狀態的,從而加快實現液壓的自動爬升[3]。在爬升的過程中,防墜爬升器的內部承重棘爪是受力體系,需要始終保持油缸活塞桿的收縮與伸出功能始終保持協調性與一致性。
4 結語
高層建筑為緩解城市用地緊張問題提供解決方案,為保證工程建筑施工質量和施工安全,強化新技術應用具有積極意義。本文主要研究核心筒大型鋼模板施工的專項技術,順利地解決在實施核心筒作業時的難題。
猜你喜歡
建材發展導向(2022年10期)2022-07-28 03:04:36
建材發展導向(2021年18期)2021-11-05 09:19:50
建材發展導向(2021年9期)2021-07-16 07:11:36
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中國房地產業(2016年2期)2016-03-01 01:25:48
河南電力(2016年5期)2016-02-06 02:11:34