精量播種機內部信號處理與傳輸智能化分析
2020-10-17 03:08:26韓洪杰
農機化研究 2020年10期
錢 彬,韓洪杰
(河北能源職業技術學院,河北 唐山 063000)
0 引言
傳統播種機由于田間作業環境的局限性,如待播種田地的作物茬雜亂、待播種土壤濕度不合適及觀察播種工況困難等,會對播種機的效率產生不同程度的影響。經查閱文獻可知,國內相關學者主要從整機的結構布局優化、播種株距的可控性調節、漏播率等方面對精量播種機的優化展開研討;而國外則側重于提升播種機的精量化與智能化程度,如設計加裝電磁閥控制、PID調節、播種工況顯示等模塊。其中,多功能性傳感裝置起到至關重要的作用。筆者在借鑒前人研究應用的基礎上,從精量播種機的內部信號檢測控制角度出發,進行智能化分析研究。
1 精量播種機作業概述
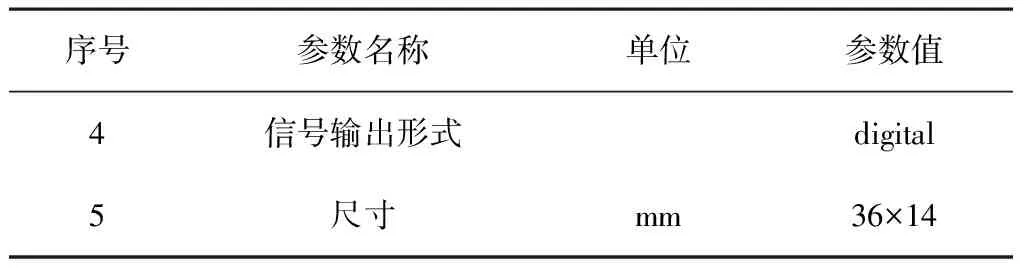
精量播種機主要由驅動電機、排種箱、排種輪、接種裝置及變速箱等組成,技術參數如表1所示。工作時,以單粒播種為原則,通過播種調節執行裝置確保投種位置與深度,利用信號自動處理檢測理念對播種量與播種狀況進行實時控制。播種作業過程中的數據信號處理與傳輸技術主要體現在:在進行播種的過程中,采集最初的排種速率、種子流信號速率、距離傳感信號等,在信號轉換器或編碼器等裝置的配合下,實現信號的智能準確傳輸。
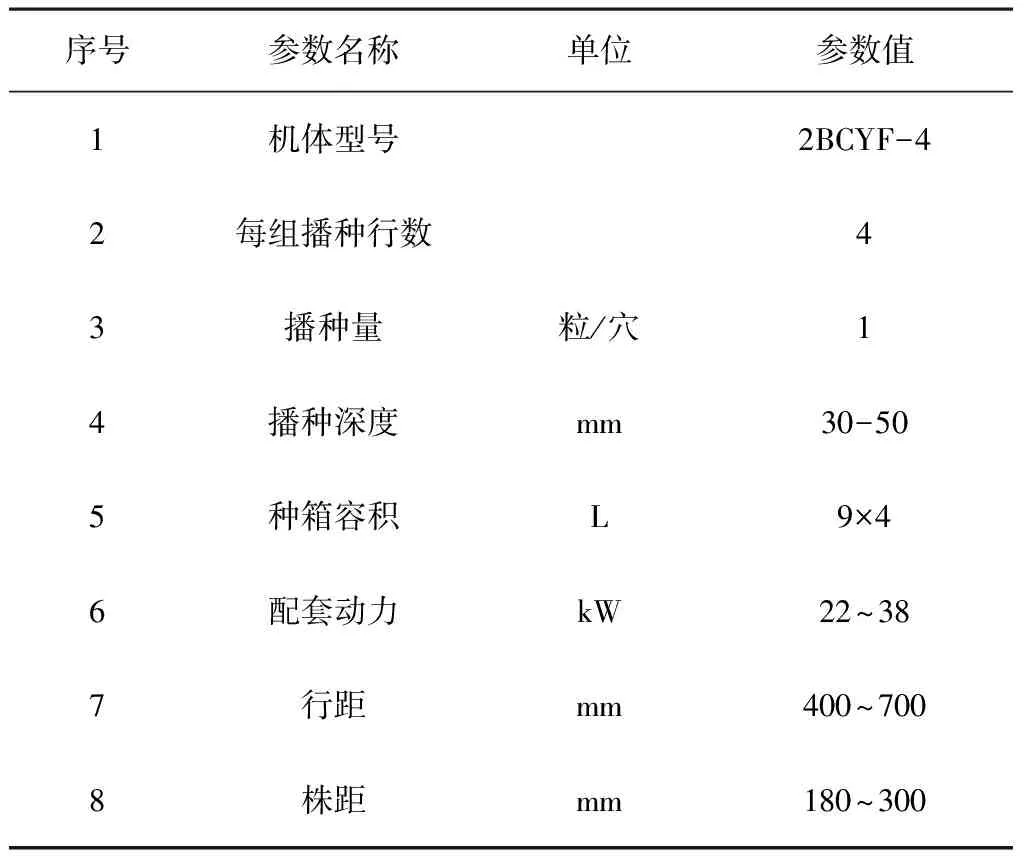
表1 精量播種機主要技術參數設置
圖1為精量播種機進行現場作業的場景。該作業模式下,前端駕駛操作與后端的作物播種必須進行實時的信號傳送與協調,根據精量播種機的作業特性設計播種作業過程中信號檢測流程,如圖2所示。
2 精量播種控制系統分析
2.1 監測控制模型確立
針對信號傳輸智能精準目標建立監測控制系統模型確立,設計精量播種機監測系統功能實現框圖,如圖3所示。信號處理放大作為中間核心控制單元,將信號分解為漏種、堵種與多種3類型,通過CPU主從機設計相對應的操作裝置、顯示裝置與報警系統,確保信號傳輸與處理功能齊全。

圖1 精量播種機作業場景圖
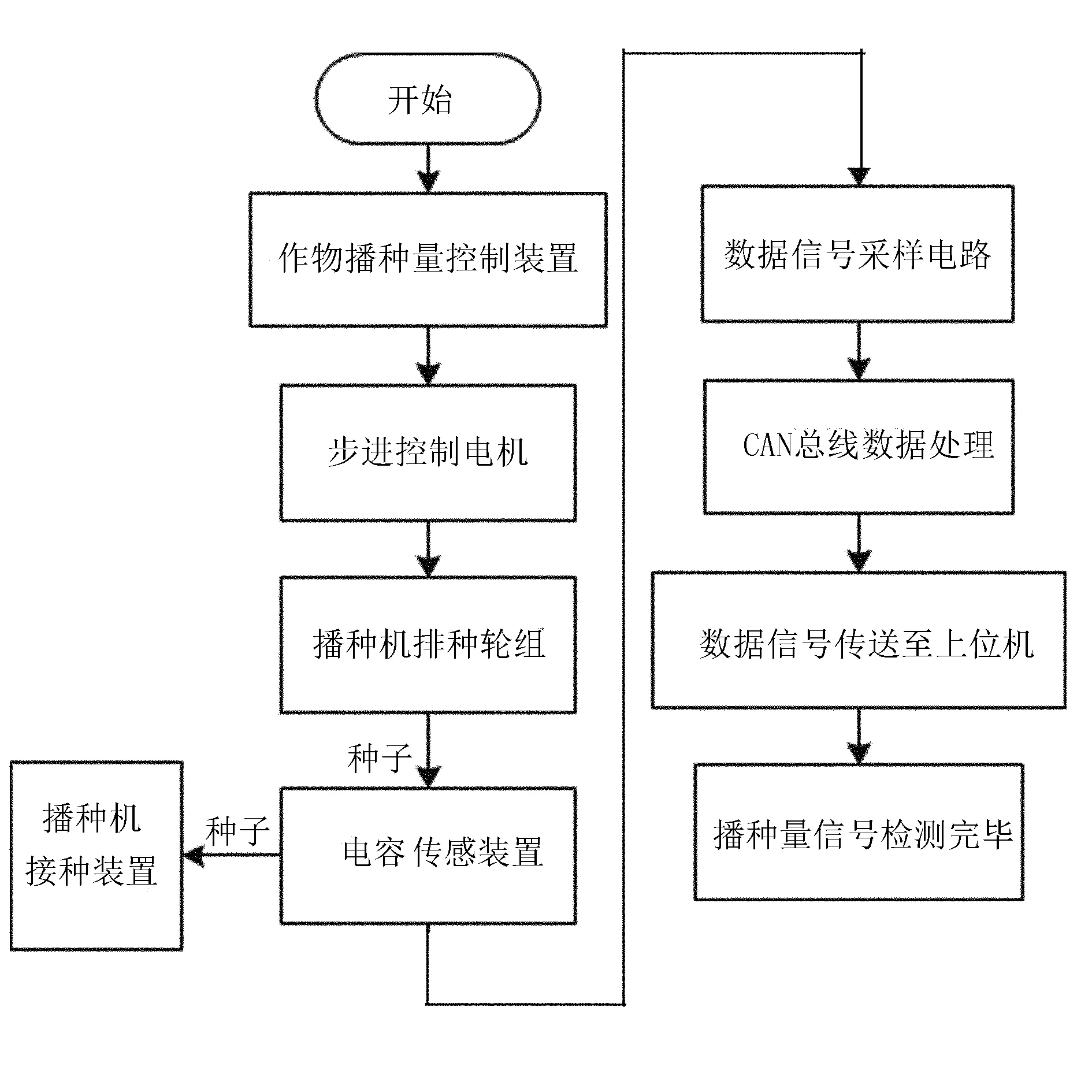
圖2 精量播種機作業信號檢測流程簡圖
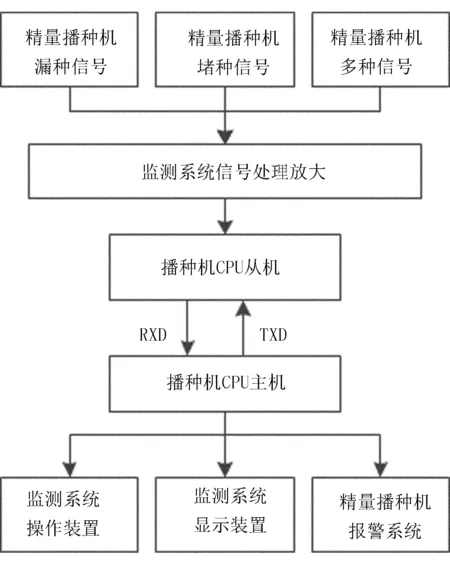
圖3 精量播種機監測系統設計原理與實現功能框圖
根據精量播種機驅動輪轉速、信號脈沖頻率與播種量三者之間的關系,在其側面關鍵行走裝置中安裝壓電傳感器,信號監測部位安裝編碼計數裝置,則
(1)
式中n—精量播種機驅動輪轉速(r/min);
f0—精量播種機信號監控系統脈沖頻率(Hz);
Z—精量播種機編碼器輸出單位脈沖個數;
M—精量播種機編碼器兩個脈沖間時鐘脈沖個數;
q—精量播種機單個播種裝置的播種數量(粒);
a—精量播種機參數換算系數;
N—精量播種機播種裝置數量;
v—精量播種機作業速度(m/s);
B—精量播種機行距(mm);
結合上述關系,選取具有靈敏度高、適應性能的電容傳感測量儀器,通過播種機作業過程中電容變化量建立內部信號處理監測模型,即
(2)
(3)
式中ε0—真空介電常數;
ε1—種子的相對介電常數;
ε2—空氣的相對介電常數;
εr—相對介電常數;
V1—種箱內種子所占體積(mm3);
V2—為空氣所占體積(mm3);
V—電容傳感器平行板間總體積(mm3);
S—電容傳感器平行板間相對重疊面積(mm2);
d—電容傳感器平行板間相對距離(mm);
ε—電容傳感器工作時電容介電常數;
C—播種時電容傳感器產生電容;
C0—無作物種子通過時電容傳感器產生電容;
ΔC—播種時電容變化量。
2.2 監測控制系統設計
依據模型設計精量播種機信號監測控制系統,以滿足監測需求為目標,通過檢測傳感器、速度傳感器進行位置信號捕捉與傳遞;同時,通過補種機理建立補償驅動機構,進行系統補種模塊裝置選型(見表2),并將播種株距、單行播種量、作業速度及報警系數等參數實時顯示。
精播機種子流信號檢測電路設計如圖4所示。工作時,在+3V電源電壓驅動下,種子流信號被二極管信道檢測,此時相應的編碼感應模塊進行計數,并經邏輯門控制電路傳輸至下一控制模塊,此過程必須保證步進電機與編碼器同軸性,規范設置電路的PWM模塊運行條件。
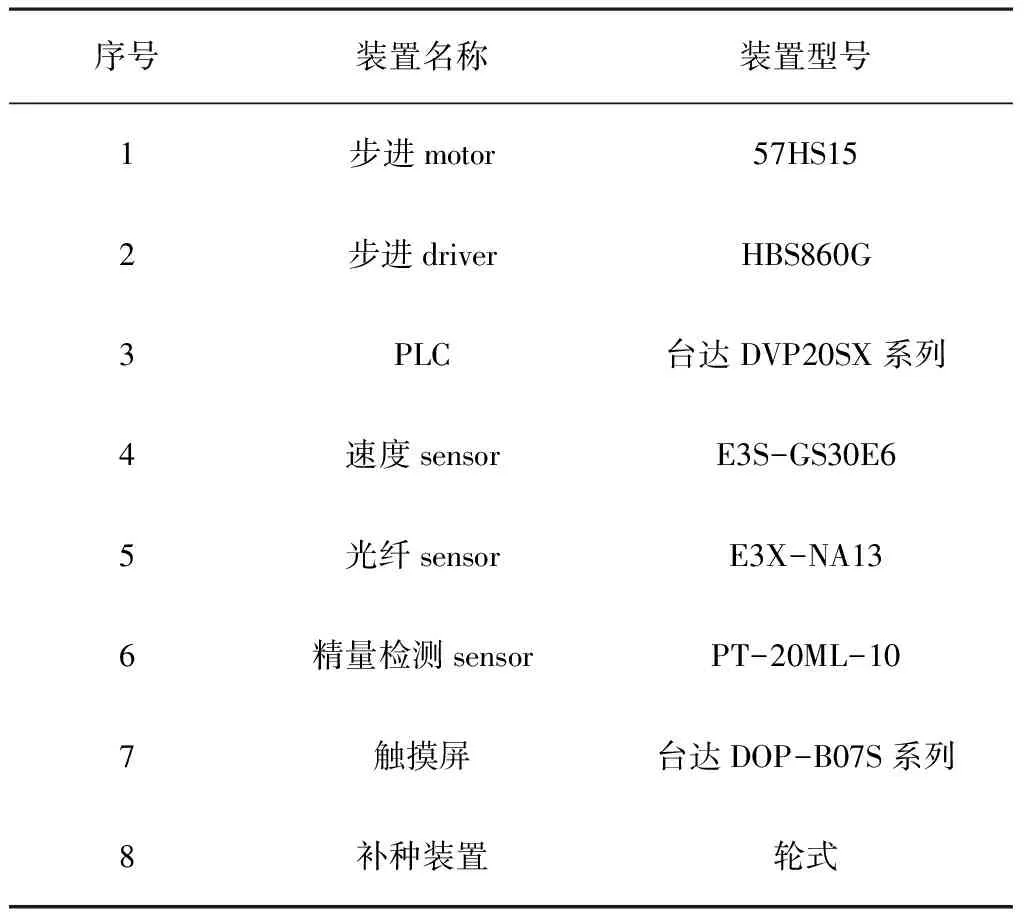
表2 精量播種機監測控制系統補種模塊裝置選型

圖4 精量播種機種子流信號檢測設計電路圖
設計該信號處理監控系統的軟件程序控制模塊,配置寄存器,利用無線通信確保各數據節點引腳按照信號處理原則寫入;根據圖5所示的軟件信號處理流程,判定種子下落信號進行定時與不同狀況信號程序執行。
根據精量播種機內部信號傳輸特性,列出如表3所示的核心傳輸模塊參數設置,主體表征為在一定的電壓與電流控制指令下,以數字信號進行內部交互傳遞。
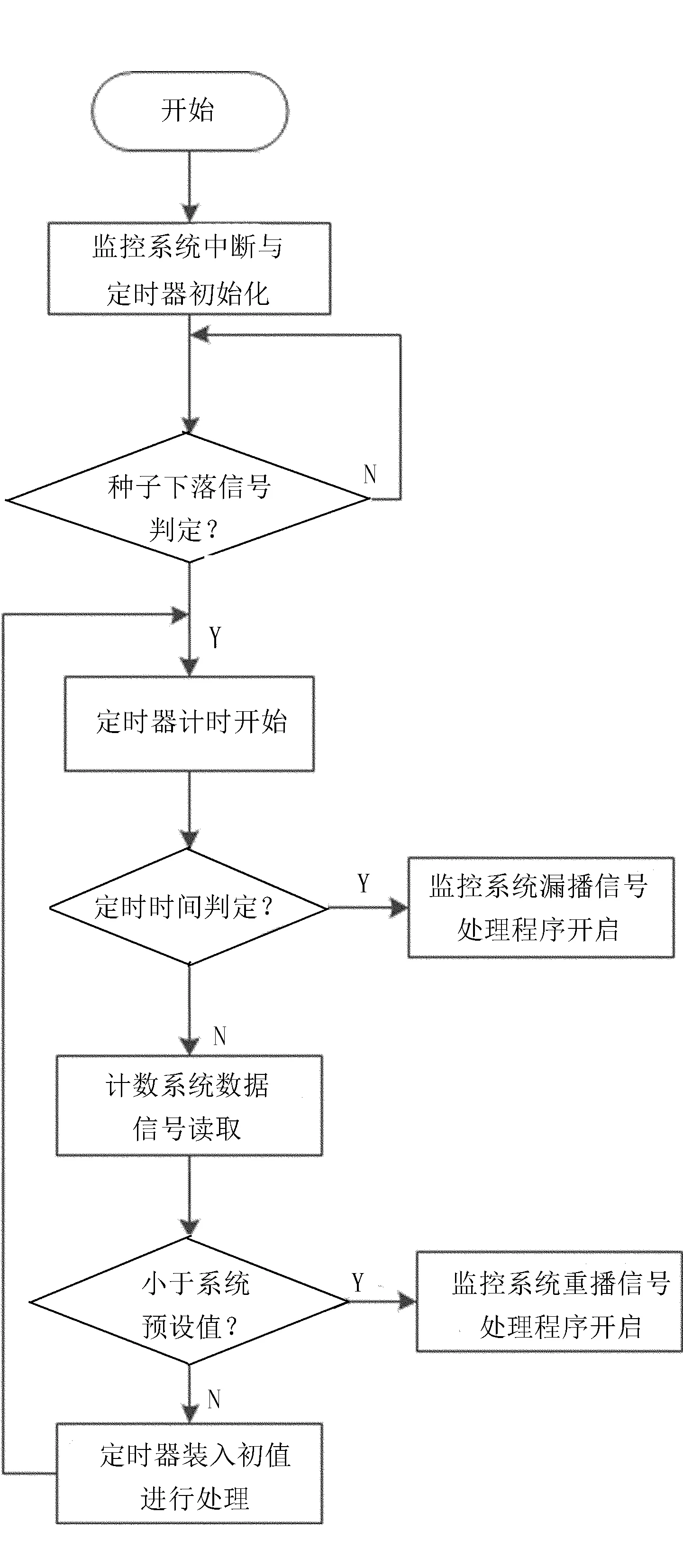
圖5 精量播種機監控系統軟件信號處理流程圖
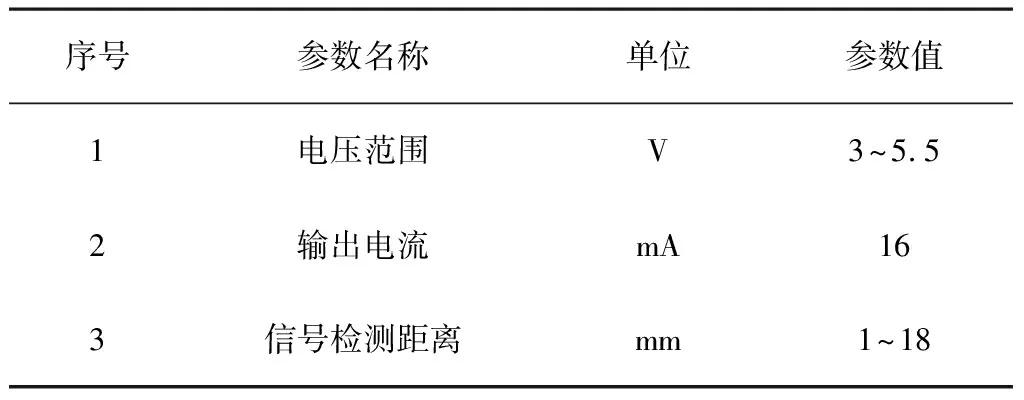
表3 精量播種機監測控制系統信號傳輸模塊參數設置
續表3
2.3 信號處理傳輸目標實現
精量播種機控制系統信號處理與傳輸機構框圖如圖6所示。
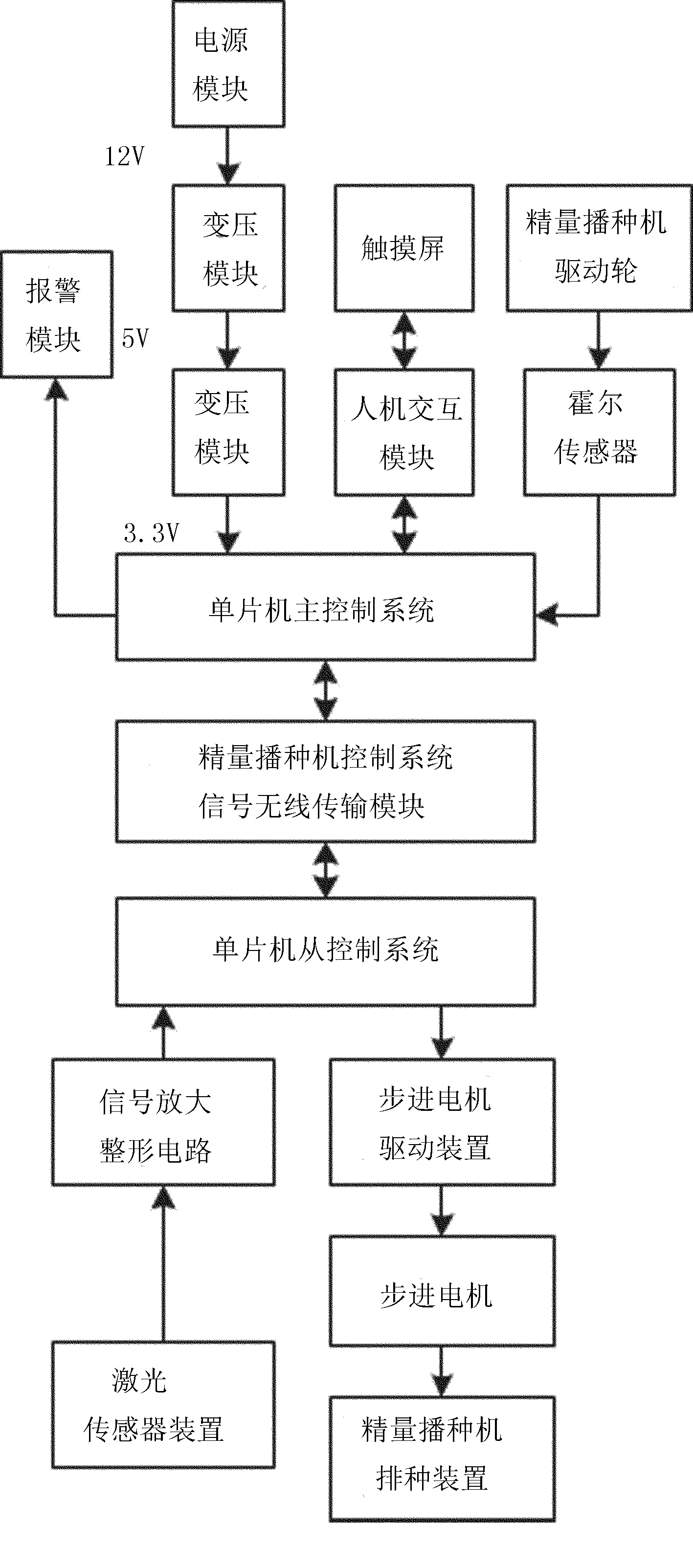
圖6 精量播種機控制系統信號處理與傳輸結構框圖
信號采集將階梯變壓、人機交互與智能傳感三大模塊匯入無線傳輸模塊,信號經單片機由控制系統處理后到達其排種裝置,在信號路徑與數據追蹤控制環節融入SVR思維模型,實現信號精準傳輸。
以信號故障類型分解為條件,通過內部信號網絡建立精量播種機信號處理程序執行標準流程,顯示漏播與重播位置,如圖7所示。配置抗干擾模塊,利用程序信息冗余技術,結合集成單獨供電線路,配置參數相當的光電耦合裝置與極速響應系統,對出現的故障進行預防性處理,實現精量播種機的信號傳輸連續性與可靠性。
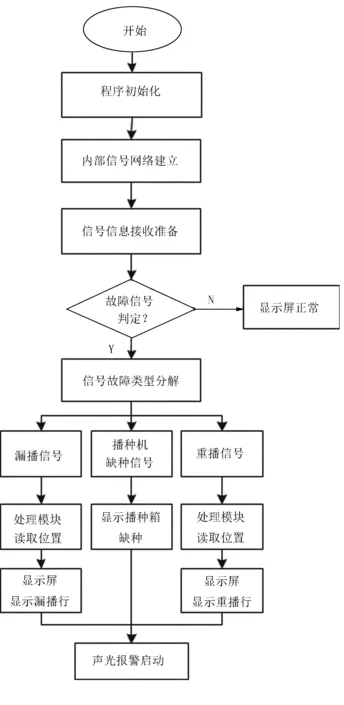
圖7 精量播種機內部信號處理模塊程序執行流程簡圖Fig.7 Program execution flow chart of internal signal processing module of precision seeder planter
3 系統仿真
3.1 條件設置
進行基于信號智能監測技術的精量播種機控制系統仿真試驗,選擇仿真主要器材為:①1臺精量播種機簡易單體;②1套智能信號傳輸控制系統及供應電源;③1臺步進驅動電機與相配套的步進驅動器;④若干項播種機仿真輔助試驗零部件。
設計好相匹配的仿真核心控制性能參數(如排種速率、精量控制裝置安裝高度、播種株距等),選擇玉米作為試驗用種子,同時確保各裝置信號傳輸接線牢固,展開仿真試驗。
3.2 過程分析
針對仿真試驗裝置設定不同的排種速率,該精量播種信號檢測裝置進行記錄,得到該系統的設計性能仿真數據統計,如表4所示。由表4可知:以1.5r/min的排種速率遞增,分別預設400、600、800粒的播種量,考慮系統試驗過程中累計誤差的不可避免性因素在內,得到的系統評價檢測準確率達到95.3%以上,最高的檢測準確率可達98.0%,驗證了系統監測的合理可行性。
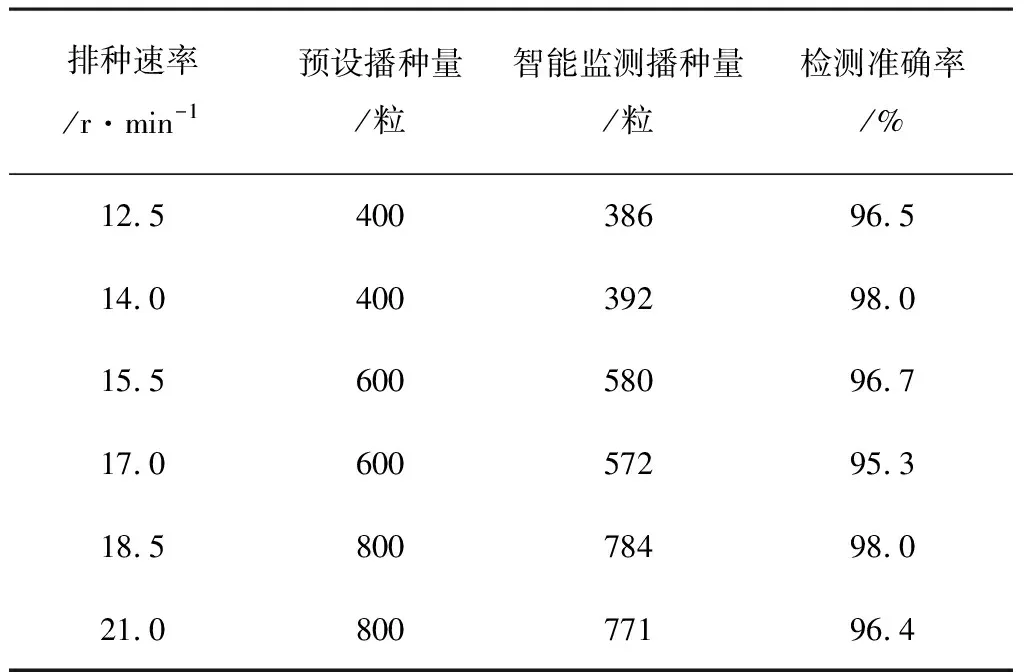
表4 精量播種機控制系統信號監測設計性能仿真數據統計Table 4 Performance simulation data statistics of signal monitoring design for the precision seeder planter control system
進一步試驗并調整播種株距依次為150、200、300mm,同步記錄數據經換算后,得到的基于信號智能監測技術的精量播種機播種主要評價參數如表5所示。由表5可知:一般化監測方式下的精量播種機株距合格率為84.91%,在信號智能監測方式下整體提升度為10.16%,為93.54%;重播率及漏播率在信號智能監測方式下整體提升度為33.47%與27.85%,信號智能監測后精量播種機作業效果改善明顯。
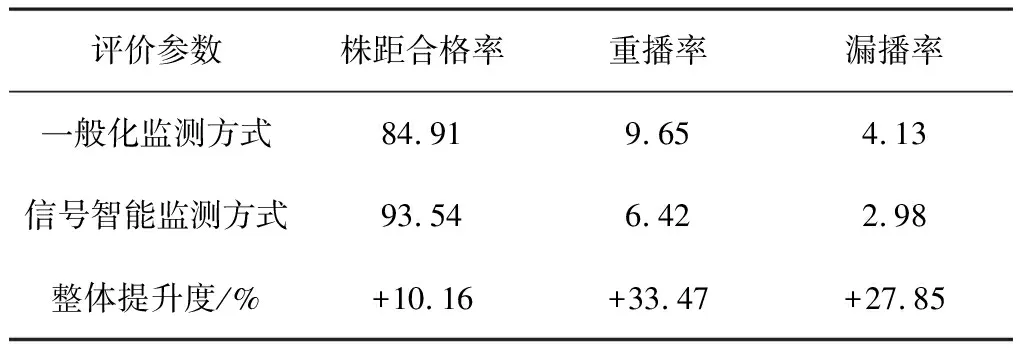
表5 基于信號智能監測技術的精量播種機播種主要評價參數對比Table 5 Comparisons of main evaluation parameters of the precision seeder based on intelligent signal monitoring technology %
4 結論
1) 通過系統性分析精量播種機的作業機理,利用電容傳感技術與信號無線傳輸技術,建立整機監測控制模型,并基于軟件控制與硬件配置展開系統設計,實現了監測系統內部信號處理的精準智能化傳輸目標,為播種機的作業效率提供了控制保障。
2) 基于該信號監測控制模型,進行系統仿真試驗,結果表明:內部信號經智能分析處理傳送后,整機運行穩定,株距合格率、重播率與漏播率作業效果可優化10%以上,效果良好。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中國生殖健康(2019年3期)2019-02-01 06:12:26
故事大王(2016年7期)2016-09-22 17:30:08
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
兒童故事畫報(2013年3期)2013-06-24 05:40:30