采棉機體積流量灰色預測模糊PID控制方法
2020-10-19 07:01:50王由之李光耀劉秀梅張宏文
農機化研究 2020年4期
關鍵詞:模型
王由之,王 磊,李光耀,張 勇,劉秀梅,張宏文
(1.石河子大學 機械電氣工程學院,新疆 石河子 832003;2.農業部西北農業裝備重點實驗室,新疆 石河子 832003)
0 引言
采棉機前進速度是影響收獲機作業質量和收獲效率的主要參數,性能良好的采棉機在高采凈率和允許損失量的前提下應具有較大的前進速度。研究表明:采棉機的工作環境是復雜開放、非結構性地理環境,有較強的非線性、時變性等諸多不確定性擾動,部件的工作狀態、機構性能隨棉花的物理特性及路況的變化而改變,控制參數及工作性能參數也會變化,工作性能參數與影響因素之間數學模型很難建立[1-2]。國產采棉機作業速度無法及時適應外部作業條件,以及棉花密植程度、行駛阻力的變化等作業環境,導致棉花采凈率低、輸棉管道堵塞,無法保證棉花采收質量。行走速度太快,極易造成輸棉管堵塞,導致采棉機發生故障,嚴重時甚至發生火災;行走速度過慢,會導致棉花采摘效率低下、含雜率較高,從而導致棉花品質下降。針對以上問題,研究控制采棉機行進機構更加穩健的速度控制系統尤為重要。
目前,國內外對采棉機采摘裝置的研究較多,而針對采棉機前進速度控制方面的文獻較少。陳進等設計了一種聯合收獲機前進速度灰色預測模糊控制系統,運用灰色預測模糊控制算法能使控制系統的調節時間較短、超調量較小、控制性能得到提高[3]。姬江濤等針對聯合收獲機控制系統的非線性、復雜性,將灰色預測理論和模糊PID控制設計思想融合,建立了灰色預測數學模型,設計了灰色預測模糊PID控制器,并將其應用于喂入量的控制[4]。苗中華等針對采棉機作業速度影響采棉效率的問題,建立了行走機構速度調節模型,并運用模糊PID控制算法對采棉機作業速度進行實時調節,實現了采棉機作業速度最優控制[5]。
本文結合灰色預測模糊PID控制技術,設計了一種采棉機行進速度控制系統,建立了行進速度灰色預測系統的預測模型,并采用PID控制算法在MatLab/Simulink中對模型進行了仿真和校正,使其行進速度保持在適宜的范圍之內,以期獲得最佳的控制效果。
1 體積流量灰色預測模糊PID控制原理
采棉機體積流量選用的控制策略為模糊理論、PID控制等方法,是由已經發生的行為動作對系統進行反饋控制。由于采棉機工作系統復雜多變,很難做到實時、準確地對行走機構做出及時調速。通過體積流量灰色預測模糊PID控制將灰色預測理論和模糊推理思想相結合[6],使用一種新型的步長調節機制,不僅避免了通過建立模糊規則改變灰色預測步長的繁瑣,同時還避免了通過經驗設定步長、變換閾值改變步長的偏差大和耗時性[7]。通過測到的棉花流量數值為采集的樣本信息,通過對體積流量數據的讀取,按照新陳代謝方法建立體積流量的灰色預測模型,同時使用模糊PID參數控制器對工作參數進行在線實時校正和調節,實現對采棉機行走速度的實時控制[8]。
采棉機體積流量[9]為
Q=36Bqvη
(1)
式中Q—單位面積內棉花體積流量(kg/h);
B—機器原工作幅寬(m);
q—單位面積內棉花的質量(g/hm2);
v—機器行進速度(m/s);
η—不均勻系數,η=80%~85%。
由式(1)可知:B、q、v、η任意一個變量發生改變,體積流量就會變化。以體積流量Q為控制系統的控制目標,被控對象為采棉機的行進速度v,通過控制采棉機前進速度對體積流量實時進行調整,體積流量將會維持在有效的范圍內,采棉機收獲性能達到最佳。
體積流量Q的精準測定是獲得高控制精度的前提。棉花通過輸棉管時,不同棉花流量會對流量計產生不同的高低電平。以棉花采摘裝置較近的輸棉管為試驗采集對象,將流量傳感器安裝在集棉箱的出棉口,體積流量的數值由傳感器測得,從而得出體積流量的大小,并完成流量的實時測量。
控制系統如圖1所示。以體積流量Q為控制系統的模糊控制量,模糊控制的輸入量為誤差e和誤差變化率de/dt[10]。控制結構由模糊控制規則和模糊輸入量所構成,校正和調節之后得出PID控制的調節系數,送到PID控制器之前先要經過解模糊化計算,采棉機的行進速度由此來控制。
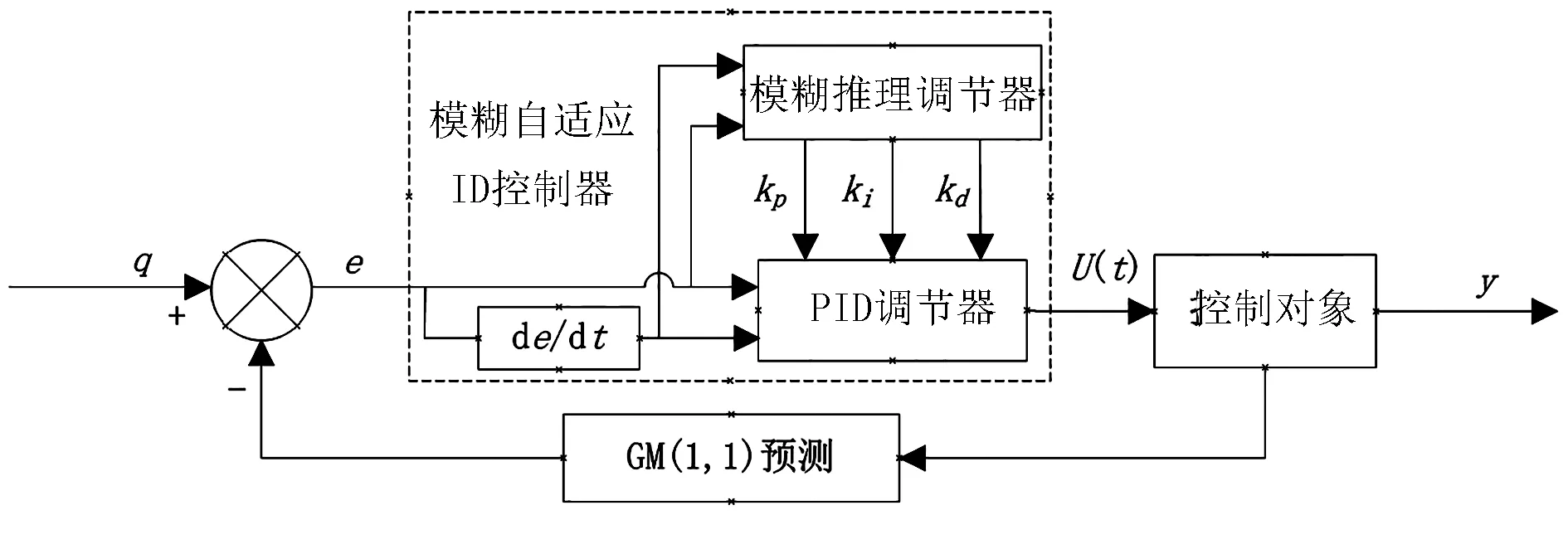
圖1 灰色預測模糊PID控制系統結構圖Fig.1 Block diagram of grey prediction fuzzy PID control system
工作時,比較器不是直接接收閉環控制系統中由傳感器測得的體積流量,接收的是經過反饋回路中體積流量預測器(又稱灰色預測器)預測之后的體積流量。該預測器在當前(第k步)對體積流量進行連續高效采集數據,根據灰色預測算法發現信息潛在的發展規律對第k+m步的體積流量值進行推測,將直接測量的體積流量誤差值以及相應的誤差變化率由預測得到的誤差值e(k)=q(k)-q(k+m)進行替代,并根據模糊控制要求求出相關調節系數,實現調節系數的實時校正和在線調節。體積流量的控制范圍一般會根據采棉機體積流量的標定值來設定,下一時刻體積流量的大小是通過放置在反饋回路中灰色預測器預測得出,當預測值超出預定值范圍時,機組的行進速度會受到控制系統的實時調節,將體積流量保持在預定范圍內使超前控制得以實現。
2 體積流量灰色預測模糊PID控制器設計
2.1 體積流量灰色預測模型
灰色預測是以預測對象的原始數據序列為基礎所進行的預測,對于原始數據非負、近似呈指數增長呈增長速度并不很快的數據序列,往往能夠取得較好的預測效果;對于數據序列本身規律性不強的數列,通常可以通過累加或累減等處理方法,弱化原始序列的隨機性,使生成的新序列具有更強的規律性,從而提高預測精度[11]。描述灰色預測過程的典型模型為GM模型。灰色模型的通用表達形式為GM(M,N)。其中,M為對原始序列的累加生成次數;N為模型的變量個數。當M=N=1時,即構成了單變量一階灰色預測模型。通常計算量隨M和N的增大而呈指數性增大,結果并不一定理想。根據采棉機體積流量控制的要求,通過給出相應的測試數據并且建立數學模型。以GM(1,1)模型為基礎建立預測模型,即控制系統反饋信號是由體積流量Q為變量的一階模型[12-13]。
當前體積流量數據列向量是由傳感器測得的為
Q0=[q(0)(1),q(0)(2),···,q(0)(n)]T
(2)
式中 0—原始數據;
n—原始數據的序號;
T—矩陣轉置。
預測精度的提高通過增大n的取值實現,一般取n≥4。對體積流量原始數列進行累加得
Q1=[q(1)(1),q(1)(2),···,q(1)(n)]T
(3)

對原始數據的累加生成是為了強化系統抵抗隨機信號對系統的干擾。由累加生成數據列與原始數據列得到第k+1步體積流量的預測值為
(4)
式中ag—模型發展系數;
ug—灰色作用量;
k—第k個離散點;

方程中的兩個參數ag和ug按照最小二乘準則進行辨識,可以求得
[agug]T=(BTB)-1BTQ
(5)
Q=[q(0)(2)q(0)(3)···q(0)(n)]T
為了使控制系統實時性與高效性更好,需要對體積流量做第k+1步預測。一般會對更多步的體積流量進行實時預測。超前m步的體積流量預測值為

(1-eag)e-ag(k+m-1)
(6)
式(6)為當前測試點m步之后的體積流量預測值。此公式作為控制系統反饋回路中的傳遞函數,參與采棉機體積流量的在線實時檢測。
2.2 體積流量模糊PID控制器的設計
圖1中,模糊控制系統與參數可調整PID共同組成了模糊PID控制器,控制系統對3個調節系數實現實時自動調節,系統的控制是由PID系數可調來完成。機組行走中,體積流量將被控制在一個范圍內不會是一個具體數值。若為一個數值,則控制系統會因為棉花的基本特性、路面狀況等因素的變化,使控制系統會處于不穩定的工作狀態中,自動控制的目的難以達到,還會使采棉機變得難以操控。因此,對采棉機體積流量的閾值指標的設置為:當體積流量在閾值范圍之內時,控制系統會在當前運動狀態下保持不變;若預測值超出閾值范圍,則控制系統會對被控對象進行自動校正和調節。設體積流量最佳范圍是[R1,R2],控制過程為:當R1≤q≤R2時,采棉機會保持當前的行進速度;q
將控制系統的誤差值E和誤差變化率Ec作為模糊控制器的輸入變量[14],以它們變化范圍來定義模糊集上的域論,即
E= {0,1,2,3,4,5,6}
EC= {0,1,2,3,4,5,6}
對應的模糊子集為
E= {零(ZE),小(PS),中(PM),大(PB)}
EC= {零(ZE),小(PS),中(PM),大(PB)}
定義3個輸出變量:①Kp為比例校正系數;②Ki為積分校正系數;③Kd為微分校正系數。則
Kp={零(ZE),小(PS),中(PM),大(PB)}
Ki={零(ZE),小(PS),中(PM),大(PB)}
Kd={零(ZE),小(PS),中(PM),大(PB)}
控制規則通常根據系統響應速度、魯棒性、精度和超調量等要求來制定。模糊規則是根據控制系統中PID各控制參數來設定的:當誤差值較小時,可增大比例系數,減小積分系數。微分系數根據經驗可以選取中等值,系統可以存在一定的誤差。模糊控制器有2個輸入變量E和EC,3個輸出變量Kp、Ki和Kd,據此規則進行多次實驗,最終總結出模糊控制規則表。當控制系統運行時,對模糊規則結果中的數據進行處理,對控制系統中PID數值進行參數校正[15]。
2.3 模糊PID 控制系統的設計
將誤差E和誤差變化率EC添加到PID控制器中的輸入端,將誤差及誤差變化率根據模糊化計算轉變為模糊輸入量,通過規則得到模糊輸出量,通過解模糊化得出精準的控制量Kp、Ki和Kd,則數值被鎖定在0~1間。在控制系統具體應用時,需要乘以合適的比例因子kp、ki和kd,則實際的參數Kp、Ki和Kd。輸入輸出變量隸屬度函數如圖2、圖3所示。
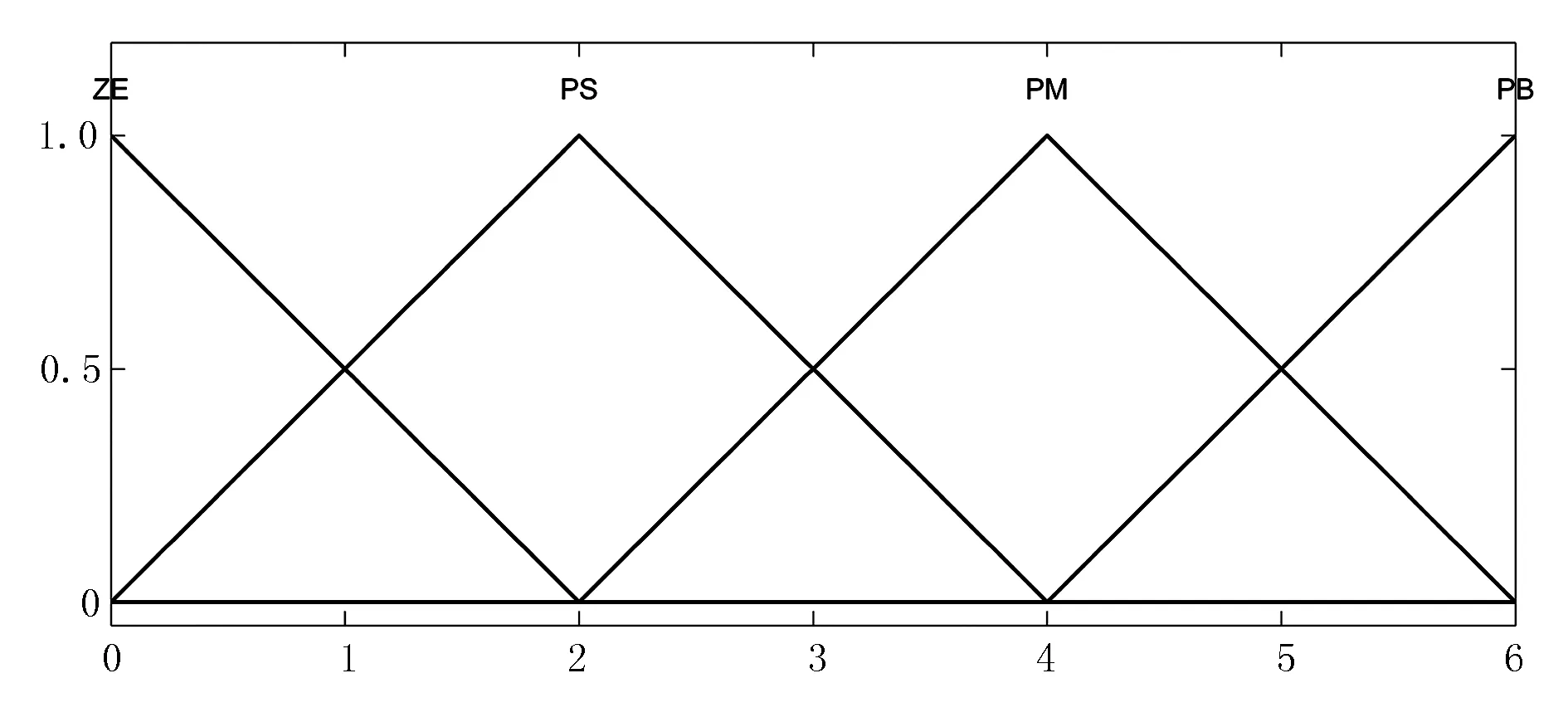
圖2 輸入變量E、EC的隸屬函數曲線Fig.2 The membership function curves of input variables E and EC
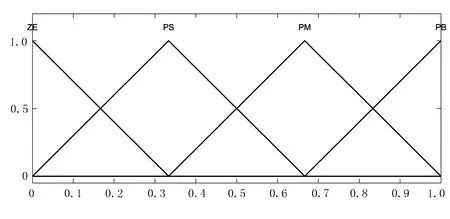
圖3 輸出變量Kp,Ki和Kd的隸屬函數Fig.3 Membership functions of output variables Kp,Ki and Kd
2.4 基于MatLab和灰色預測模糊PID的控制系統
通過PID控制原理,建立PID虛擬控制器,使PID參數進行實時校正和調節,自適應控制能夠優化和改善控制效果。體積流量作為輸入量,經過比例、積分和微分環節輸出[16]。在灰色模糊PID控制系統中,模糊控制器的輸入量為誤差值E和誤差變化率EC,輸出量為控制系統調校參數Kp、Ki和Kd。在編輯器中添加輸入、輸出變量,根據定義的輸入輸出變量及模糊子集的規則,完成各變量的隸屬度函數的定義。輸入變量范圍是[0~6],輸出變量范圍是[0~1]。為簡化系統的設計,該系統采用三角隸屬度函數。根據歸納出的模糊控制規則表,列出16條控制語句,將其錄入規則編輯器。當輸入變量取不同數值時,各輸出量的數值會根據Mandini算法得出。比例、積分和微分調節參數(Kp、Ki和Kd)的控制表如表1~表3所示。比例、積分和微分系數調校參數(Kp、Ki和Kd)的控制曲面如圖4所示。控制曲面均為非線性,說明模糊控制本身就是非線性的。通過控制器對3個參數進行校正與調節,將模糊理論與PID控制有機地結合在一起建立一個模糊PID控制系統。
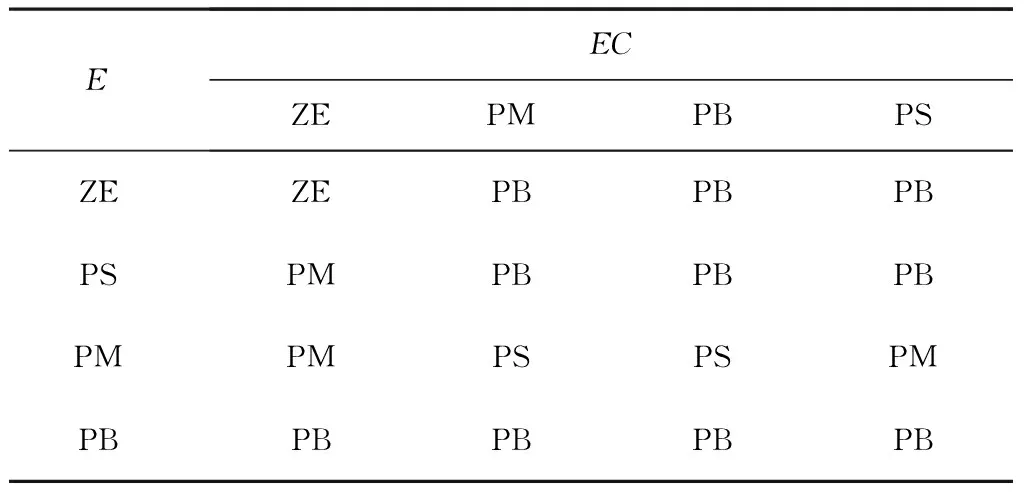
表1 Kp的模糊控制規則表Table 1 Fuzzy control rule table for KP
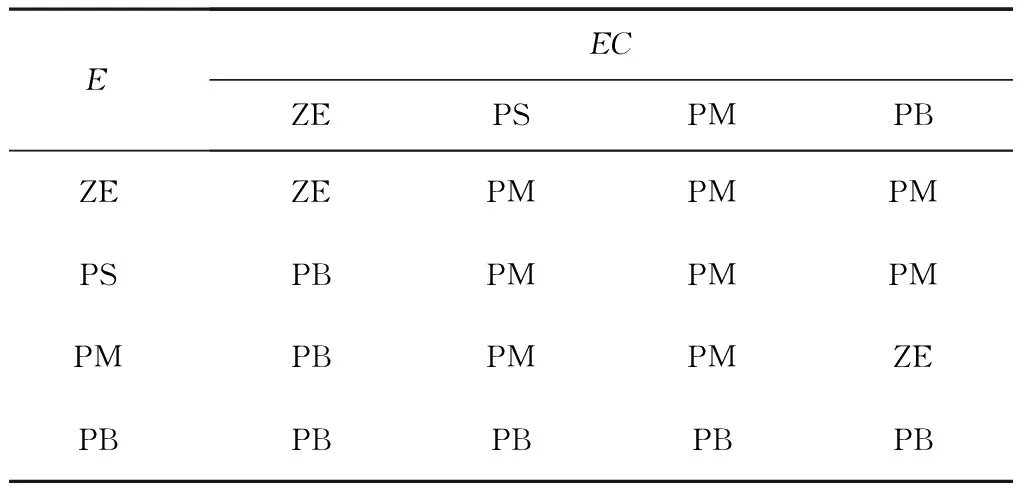
表2 Ki的模糊控制規則表Table 2 Fuzzy control rule table for Ki
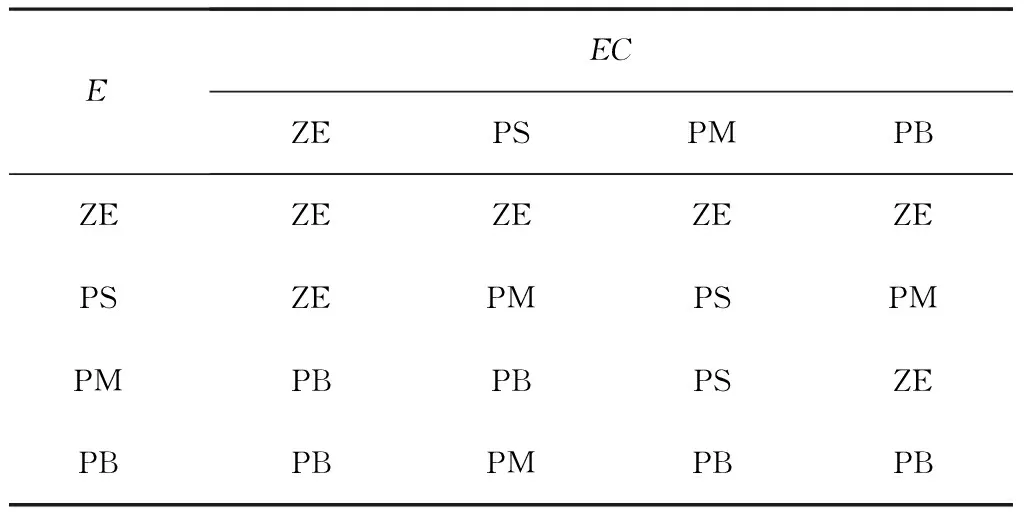
表3 Kd的模糊控制規則表Table 3 Fuzzy control rule table for Kd

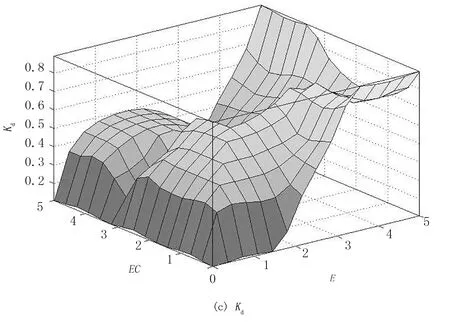
圖4 比例-積分-微分系數調校參數的控制曲面Fig.4 Control surfaces of PID correction parameters
3 算法仿真與結果分析
3.1 控制算法仿真
圖5為在Simulink環境下采棉機行進控制系統仿真模型,模型是由系統傳遞函數與系統仿真模型有機結合得到的。使用M語言對仿真模型進行編寫并通過控制算法對其進行仿真驗證。通過仿真驗證可以看出:常規PID控制超調量大,響應時間長,速度慢;當采用灰色預測模糊PID控制時,系統的超調量減小,響應時間短、速度快,系統的魯棒性良好。
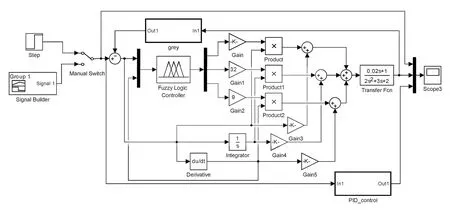
圖5 系統控制模型Fig.5 Model of system control
假定由執行機構和被控對象組成的采棉機行走系統廣義對象的數學模型為典型二階環節[2],其表達式為
(7)
3.2 仿真與結果分析
根據具體控制需求,對采棉機行走控制系統設定的性能要求如下:行進速度調節的準確度達到1m/s,測試精度為0.5m/s,調節器對行走機構的控制和調節應在1~2s之內完成[17]。根據系統控制要求,控制結果的超調響應時間應控制在1~2s間,控制誤差應小于0.5m/s。
1) 階躍響應跟蹤曲線下的仿真分析。在無干擾信號的狀況下,控制系統輸出如圖6所示。
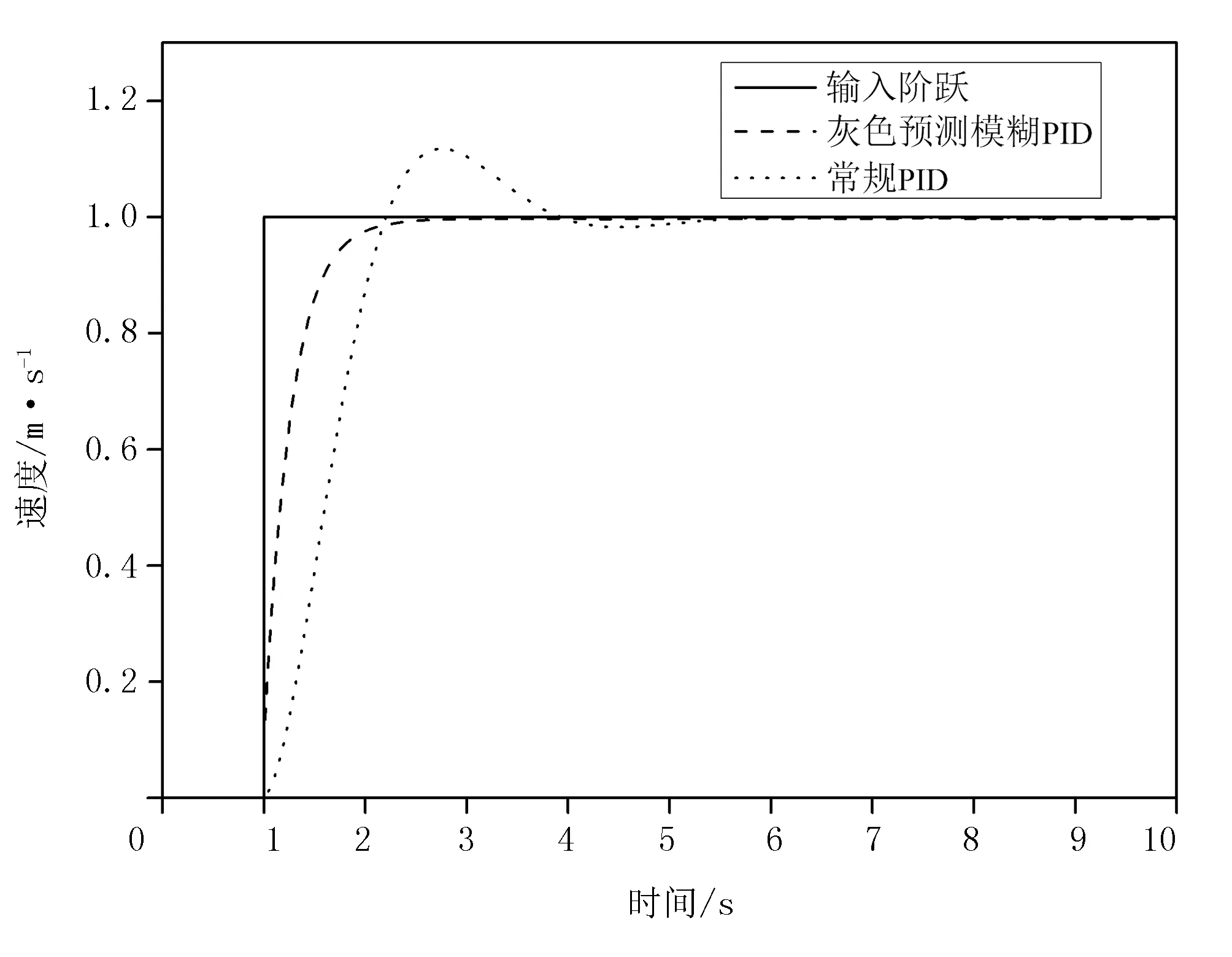
圖6 階躍響應跟蹤曲線Fig.6 Step response curve
在控制參數相同的條件下,常規PID控制輸出響應速度慢,且超調量大;而灰色預測模糊PID控制器超調量響應較小,響應時間為0.7s,性能指標提高較為顯著。
2)具有外界干擾時控制系統性能分析:選用幅值為4mm、周期為8s的方波作為輸入信號,占空比為0.5;同時在被控對象中加入定時干擾源,通過仿真驗證可得出灰色預測模糊PID和常規PID的控制效果,如圖7所示。
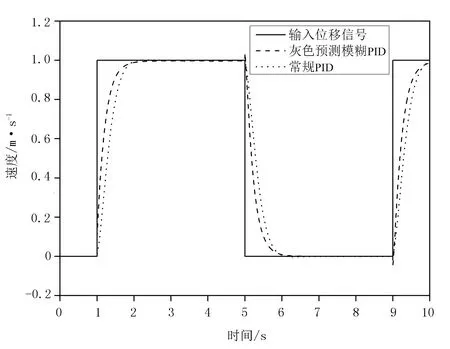
圖7 有干擾時的控制系統輸出Fig.7 Control system output with interference
由圖7可知:兩種控制方法在有干擾信號的情況下都及時做出快速響應,在2s內分別都可以使系統達到穩定狀態,說明當存在干擾信號時灰色預測模糊PID控制的控制性能較好;當仿真輸入速度為1m/s時,其實際機組運行的最大速度為1.61m/s,所以精確控制米每秒誤差的實際效果灰色預測模糊PID控制會更完美。
針對采棉機體積流量的控制要求,將灰色預測理論與模糊PID控制邏輯有機結合,對體積流量的實時有效的控制通過灰色預測模糊PID控制器來實現。利用MatLab/Simulink搭建仿真模型并做了大量仿真實驗,不斷調節、校正各部件的相關數值達到滿意的控制效果。在仿真過程中,該控制系統實現了對被控對象的參數改變,對系統性能做了加入外界干擾信號的仿真分析。結果表明:該算法符合采棉機行進速度的控制要求,具有可行性;控制系統穩定性較好,模糊PID控制的魯棒性明顯增強,系統控制性能得到提升,獲得了較好的控制效果。
4 結論
1)MatLab仿真結果表明:灰色模糊PID控制的采棉機行走系統效果較好,具有響應時間快、超調量小和控制精度高等優點,動態響應性和魯棒性明顯都要比常規PID效果顯著。
2)系統使用灰色模糊PID控制器控制,當體積流量發生階躍變化時,在階躍信號下灰色模糊PID控制要比常規PID控制的相對誤差要小,其魯棒性比常規PID控制明顯增強。
3)由灰色預測方法、模糊理論和PID控制所構成的灰色模糊PID控制器被應用在采棉機行進速度控制系統中,可以使機組在行進過程中存在的響應速度慢、超調量大等問題得到有效的改善,可以獲得較好的控制效果。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19