籃球戰(zhàn)術(shù)在采摘機器人避障模糊控制系統(tǒng)中的應(yīng)用
2020-10-19 07:02:28趙曉紅李海玉
農(nóng)機化研究 2020年4期
趙曉紅,李海玉
(河北科技師范學(xué)院 體育系,河北 秦皇島 066004)
0 引言
蔬菜水果采摘是最具有技術(shù)含量,也是最費時費力的勞動,急需實現(xiàn)自動化,而采摘機器人的避障與目標(biāo)導(dǎo)引是整個自動化系統(tǒng)中的核心[1]。目前,避障與目標(biāo)導(dǎo)引方式主要分為圖像采集分析[2]進行路徑規(guī)劃和測距傳感器遺傳模糊控制[3]兩大類。圖像采集分析方法具有避障精度高的特點,但需要高清攝像機組及高性能工控機等設(shè)備[4-5],成本高,不適用于大規(guī)模普及;同時系統(tǒng)過于復(fù)雜,穩(wěn)定性差,不能在高溫高熱的塑料大棚環(huán)境中穩(wěn)定工作。測距傳感器遺傳模糊控制系統(tǒng)[6],具有設(shè)備簡單、可靠性高的特點[7],但模糊規(guī)則與算法不完善,嚴(yán)重制約著避障精度[8-9]。為了實現(xiàn)采摘機器人的大規(guī)模普及,采用測距傳感器、基于籃球戰(zhàn)術(shù)規(guī)則[10]制定模糊規(guī)則,設(shè)計了避障與路徑規(guī)劃系統(tǒng),和傳統(tǒng)測距傳感器模糊控制系統(tǒng)相比,精度明顯提高,達到了大規(guī)模普及的要求。
本文的設(shè)計思路如下:①設(shè)計采摘機器人的行走機械結(jié)構(gòu)與控制系統(tǒng);②對機器人進行運動學(xué)分析,提出模糊控制輸入變量;③建立模糊控制系統(tǒng),包括避障系統(tǒng)、目標(biāo)導(dǎo)引系統(tǒng)、權(quán)重分析系統(tǒng)和動作融合系統(tǒng),并基于籃球戰(zhàn)術(shù)規(guī)則建立模糊規(guī)則;④模糊系統(tǒng)輸出機器人的速度V和轉(zhuǎn)角Δθ;⑤對系統(tǒng)進行仿真,檢驗避障精度與可靠性。
1 行走結(jié)構(gòu)與控制系統(tǒng)
1.1 行走結(jié)構(gòu)
設(shè)機器人正前方為Y軸,行走結(jié)構(gòu)如圖1所示。
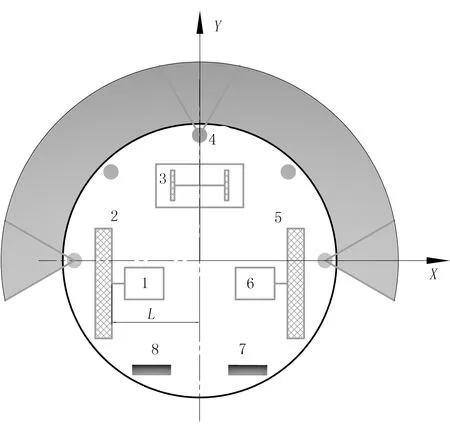
圖1 機器人行走系結(jié)構(gòu)1.左驅(qū)動電機 2.左驅(qū)動輪 3.支撐萬向輪 4.測距傳感器 5.右驅(qū)動電機 6.右驅(qū)動輪 7 .右轉(zhuǎn)向燈 8.左轉(zhuǎn)向燈Fig.1 The walking system Structure of robot
采用圓盤形布局,半徑為R;左右兩個驅(qū)動輪,半徑均為r,到Y(jié)軸的距離為L,分別由步進電機1和6獨立驅(qū)動;支撐萬向輪起到支撐行走系和轉(zhuǎn)向輔助功能;超聲波測距傳感器檢測范圍為2.5~200cm,檢測角度為60°。5顆超聲波傳感器分布如圖1所示,兩相鄰傳感器夾角為45°,小于傳感器檢測角,可實現(xiàn)無盲區(qū)檢測,同時障礙檢測范圍以Y軸為中心達到240°。該行走系主要實現(xiàn)以下功能:
1)前進。兩步進電機以相同角速度ω使兩驅(qū)動輪正向轉(zhuǎn)動實現(xiàn)前進效果,通過控制ω的大小控制速度,速度為V=ωr。
2)轉(zhuǎn)向。設(shè)機器人向左轉(zhuǎn)向為正,向左轉(zhuǎn)向時,左驅(qū)動輪以角速度ω轉(zhuǎn)動,同時右驅(qū)動輪以角速度-ω轉(zhuǎn)動,右轉(zhuǎn)角速度ar=2ωr/R;向右轉(zhuǎn)向時,右驅(qū)動輪以角速度-ω轉(zhuǎn)動,同時左驅(qū)動輪以角速度ω轉(zhuǎn)動,左轉(zhuǎn)角速度al=-2ωr/R。
3)后退。此時,兩步進電機以相同角速度-ω使兩驅(qū)動輪正向轉(zhuǎn)動實現(xiàn)前進效果,通過控制ω的大小控制速度,速度為V=-ωr。
1.2 控制系統(tǒng)
控制系統(tǒng)原理如圖2所示。超聲波傳感器組檢測障礙物距離機器人的距離li(i=1,2,…,5),則機器人中心到障礙物的距離LD=R+li(i=1,2,…,5),到目標(biāo)坐標(biāo)距離Lt=R+lt,lt為傳感器到目標(biāo)之間的距離。控制器(P89C52RA)[11]采用基于籃球比賽規(guī)則的模糊規(guī)則對傳感器組輸入信號進行分析,去模糊化后驅(qū)動左右兩個電機運轉(zhuǎn),通過控制兩個電機的角速度ω實現(xiàn)機器人的前進、后退和轉(zhuǎn)向;同時,控制轉(zhuǎn)向指示燈,前進時兩指示燈均滅,后退兩指示燈均亮,轉(zhuǎn)向時對應(yīng)的指示燈亮,從而顯示當(dāng)前機器人的運動狀態(tài)。
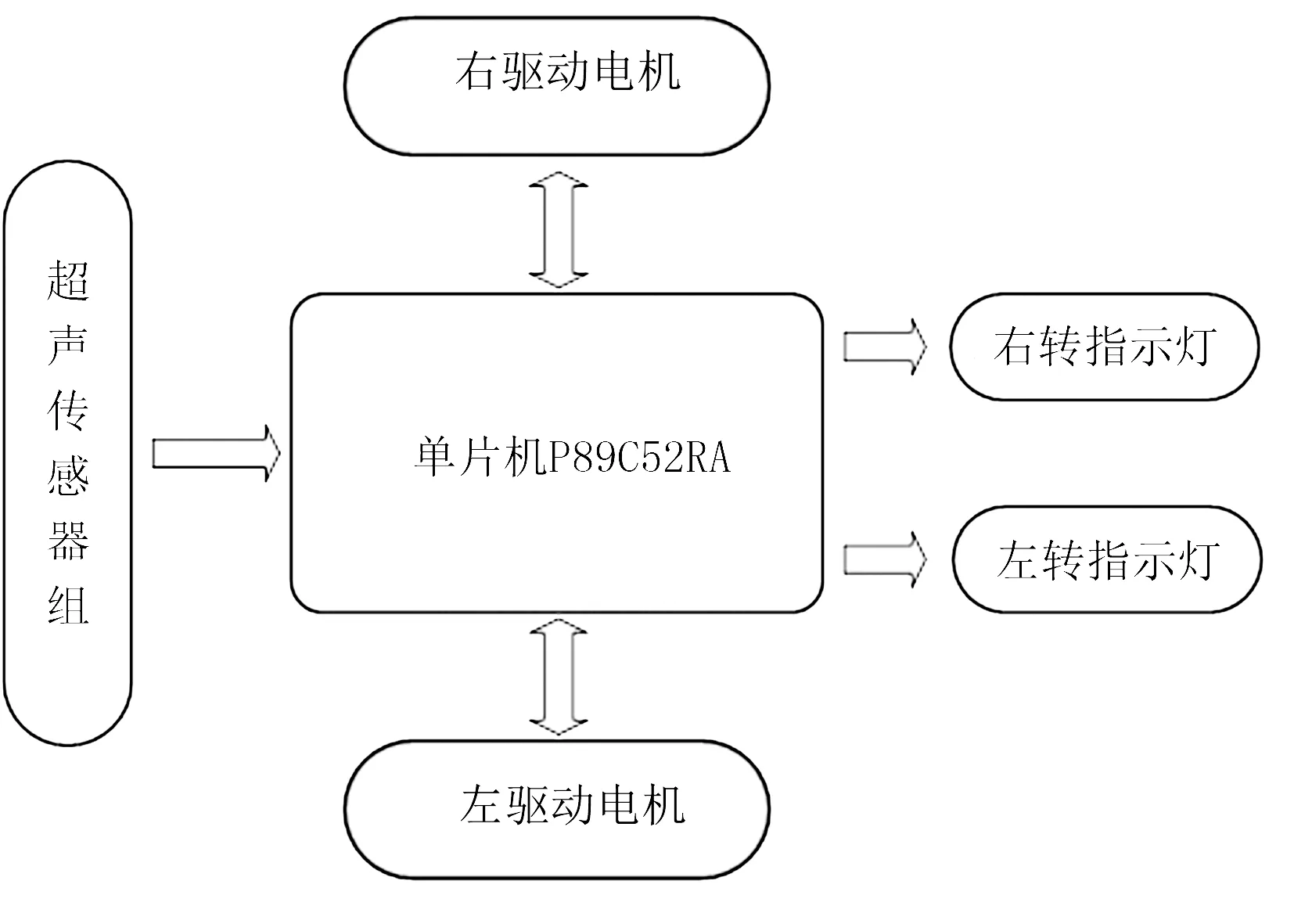
圖2 控制系統(tǒng)原理圖Fig.2 Scheme of control system
2 機器人運動學(xué)分析
機器人運動分析如圖3所示。機器人初始位置為坐標(biāo)原點,機器人正前方為Y軸方向建立坐標(biāo)系。機器人形心到障礙物的距離為Ld,與Y軸夾角為a,到目標(biāo)點的距離為Lt,與與Y軸夾角為f。機器人在經(jīng)歷到第k個記錄點Pk時位移為Sk,角位移為θk,則該點的坐標(biāo)(xk,yk)為

圖3 機器人運動分析Fig.3 Motion analysis for robot
(1)
設(shè)第k點到k+1點的位移為ΔSk+1,角位移為Δθk+1,則k+1點的坐標(biāo)及相對于原點的角位移為
(2)
由此可知:在k點坐標(biāo)已知的情況下,機器人在k+1點的坐標(biāo)及相對于原點的角位移由ΔSk+1及Δθk+1決定;ΔSk+1=ΔTk+1Vk+1,k+1點的坐標(biāo)由機器人速度Vk+1及角位移Δθk+1決定。因此,模糊系統(tǒng)最終的控制量為機器人速度V和角位移θ。
3 基于籃球比賽戰(zhàn)術(shù)的模糊控制系統(tǒng)
模糊控制系統(tǒng)包括避障系統(tǒng)、目標(biāo)引導(dǎo)系統(tǒng)、動作加權(quán)分析器和運動合成器4部分,如圖4所示。
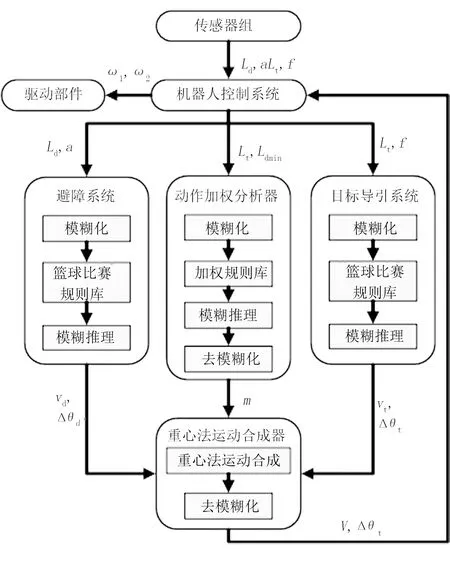
圖4 模糊控制系統(tǒng)Fig.4 Fuzzy control evadible system
超聲波傳感器檢測機器人當(dāng)前位置與目標(biāo)和障礙物之間的位置關(guān)系,得到距目標(biāo)的距離為Lt、方向角f,到障礙物的距離為Ld、方向角為a,將信號傳入機器人控制系統(tǒng)。避障系統(tǒng)輸入量為兩組到機器人最近的障礙物的距離為Ld和方向角a,輸出為模糊化后的機器人速度vd與方向角該變量Δθd。目標(biāo)導(dǎo)引系統(tǒng)輸入量到距目標(biāo)的距離為Lt、方向角f,輸出為模糊化后的Vt與方向角該變量Δθt。動作加權(quán)系統(tǒng)的輸入為距目標(biāo)的距離Lt和最近的障礙物距離Ldmin,輸出量為加權(quán)系數(shù)m。運動融合系統(tǒng)輸入為避障系統(tǒng)和目標(biāo)系統(tǒng)輸出,將二者進行重心法擬合,去模糊化,輸出機器人運動信號V、Δθ。運動信號返回控制中心,最終向兩驅(qū)動電機發(fā)出轉(zhuǎn)速信號,實現(xiàn)機器人的前進和轉(zhuǎn)彎。
模糊控制器規(guī)則來自籃球比賽戰(zhàn)術(shù)[12]:①避障系統(tǒng)規(guī)則庫原理基于規(guī)避戰(zhàn)術(shù)。當(dāng)帶球隊員接近多個防守球員時,距離遠時高速運球,向相防守隊員運動的相反方向小角度轉(zhuǎn)彎;距離中等時,中等速度運球避免被截斷,向相防守隊員運動的相反方向中等角度轉(zhuǎn)彎,避開防守隊員;距離近時,滿速運球,確保控球,向相防守隊員運動的相反方向大角度轉(zhuǎn)身,避開防守隊員。②目標(biāo)導(dǎo)引規(guī)則即要時刻清楚知道對方籃筐位置。③運動合成規(guī)則庫來源于過人戰(zhàn)術(shù),進攻隊員分析離自己最近的防守隊員位置和籃筐位置,進行加權(quán)綜合分析,規(guī)劃最優(yōu)過人路徑。
3.1 避障系統(tǒng)
避障系統(tǒng)的作用是讓機器人在未知的環(huán)境下繞過障礙物繼續(xù)前進。基于籃球戰(zhàn)術(shù)制定規(guī)則庫,取距離機器人最近的兩組障礙坐標(biāo)作為避障系統(tǒng)輸入,即Ldi(i=1,2)、adi(i=1,2),輸出為模糊化后的vd和θd。由于超聲波傳感器檢測范圍為2.5~200cm,因此Ldi中心值取N=50cm,M=100cm,F=150cm。隸屬度函數(shù)如圖5所示。其中心值取LL=-π/2,LM=-π/4,C=0,RM=π/4,RL=π/2;輸出vd中心值取S=1.8km/h,M=3.6 km/h,F=5.4 km/h。θd隸屬度函數(shù)中心值取LL=-π/2,LM=-π/4,C=0,RM=π/4,RL=π/2。
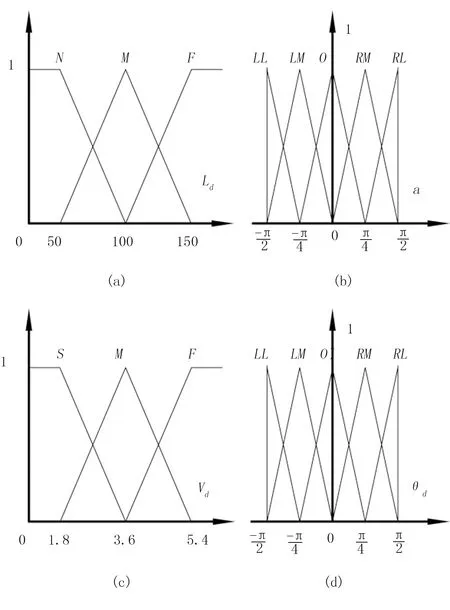
圖5 避障系統(tǒng)隸屬度函數(shù)Fig.5 Membership functions of evadible system
避障規(guī)則基于籃球戰(zhàn)術(shù),取距離機器人最近的兩組障礙坐標(biāo)作為避障系統(tǒng)輸入,當(dāng)機器人接近多個障礙物時,距離遠時(Ldi≥150cm)采用高速F運動;距離中等(150cm>Ldi≥100cm)時,采用中等M速度;距離近時(Ldi<50cm),慢速S前進。規(guī)則如表1所示。
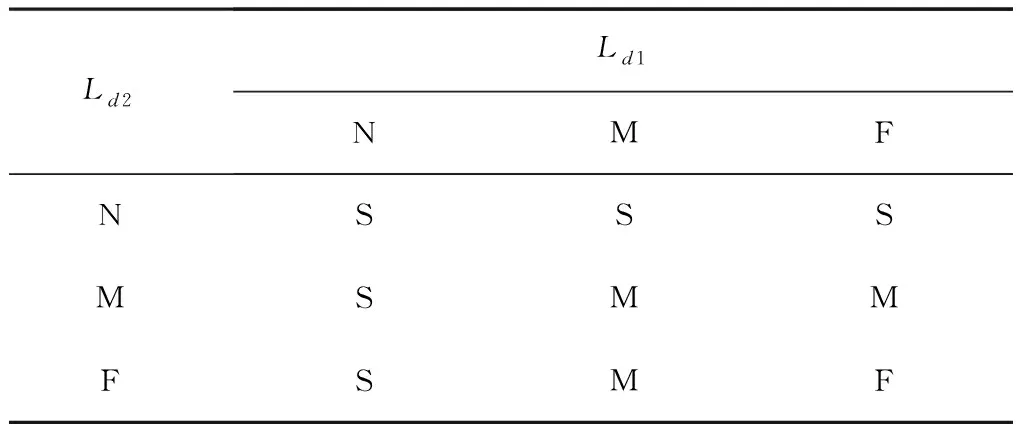
表1 vd模糊規(guī)則Table 1 Fuzzy rules for vd
機器人角位移θd規(guī)則如表2所示。當(dāng)機器人正前方出現(xiàn)障礙時,向另一障礙物相反方向轉(zhuǎn)動π/2;當(dāng)障礙出現(xiàn)在前進方向同側(cè),機器人保持原有方向不變;當(dāng)障礙出現(xiàn)在前進方向兩側(cè)最大角位置時,機器人保持原有方向不變;當(dāng)障礙出現(xiàn)在前進方向兩側(cè),且分別處于最大和中等位置時,機器人向最大位置轉(zhuǎn)π/4。
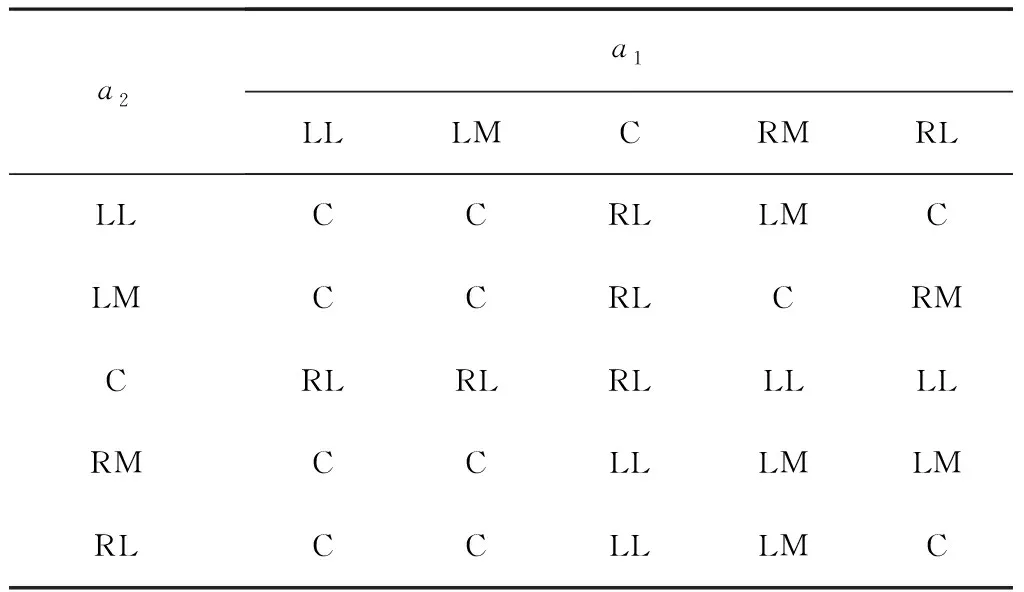
表2 θd模糊規(guī)則Table 2 Fuzzy rules for θd
3.2 目標(biāo)導(dǎo)引系統(tǒng)
目標(biāo)跟蹤系統(tǒng)為機器人的運動指明了方向,在機器人初始位置建立的絕對坐標(biāo)系中,目標(biāo)坐標(biāo)已知。系統(tǒng)輸入量為目標(biāo)距離Lt和初始位置機器人正方向與目標(biāo)位置夾角f,輸出為模糊量vf和θf,隸屬度函數(shù)如圖6所示。其中,Lt中心值取N=50cm、M=100cm、F=150cm;f中心值取LL=-π/2、LM=-π/4、C=0、RM=π/4、RL=π/2;輸出vf中心值取S=1.8km/h、M=3.6km/h、F=5.4km/h;θf中心值取LL=-π/2、LM=-π/4、C=0、RM=π/4、RL=π/2。
目標(biāo)導(dǎo)引系統(tǒng)工作過程為:①以機器人初始位置建立絕對坐標(biāo)系,設(shè)機器人前進方向為y軸;②確定目標(biāo)坐標(biāo)Pt(xt,yt);③機器人開始運動,確定自身坐標(biāo)位置Pk(xk,yk),計算當(dāng)前位置與標(biāo)坐標(biāo)Pt(xt,yt)的距離Lt和角位移f;④將距離Lt和角位移f進行模糊化處理,隸屬函數(shù)如圖6(a)和圖6(b)所示;⑤輸出模糊化vt和θt,如圖6(c)和圖6(d)所示。
模糊控制規(guī)則基于籃球比賽戰(zhàn)術(shù),當(dāng)距離遠時,采用高速運動;距離中等時,采用中等速度;距離近時,采用慢速運動,規(guī)則如表3所示。機器人角位移規(guī)則為相導(dǎo)向角f相反方向轉(zhuǎn)動-f,規(guī)則如表4所示。

表3 vt模糊規(guī)則Table 3 Fuzzy rules for vt

表4 θt模糊規(guī)則Table 4 Fuzzy rules for θt
3.3 動作加權(quán)系統(tǒng)
避障系統(tǒng)輸出vd和θd,目標(biāo)導(dǎo)向系統(tǒng)輸出為vt和θt,現(xiàn)需要確定兩者在機器人的速度和角位移融合過程中的權(quán)重。動作權(quán)重系統(tǒng)的輸入為機器人到目標(biāo)的距離Lt和機器人到最近障礙物的距離Ldmin,中心值均為N=50cm,M=100cm,F=150cm;輸出值為加權(quán)系數(shù)m,中心值為VS=0,S=1/4,M=1/2,B=3/4,VB=1。輸入輸出隸屬度函數(shù)如圖7所示,加權(quán)系數(shù)m的模糊規(guī)則如表5所示。
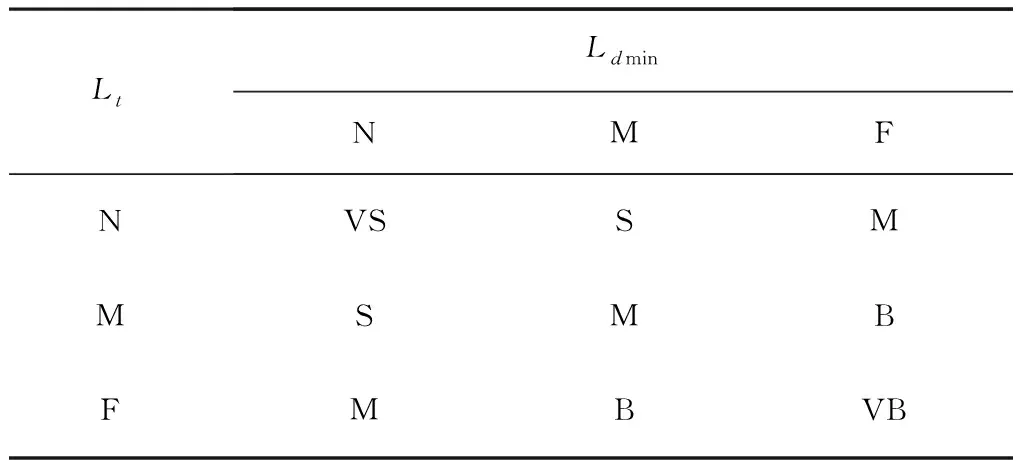
表5 加權(quán)系統(tǒng)規(guī)則μλTable 5 Fuzzy rules for μλ
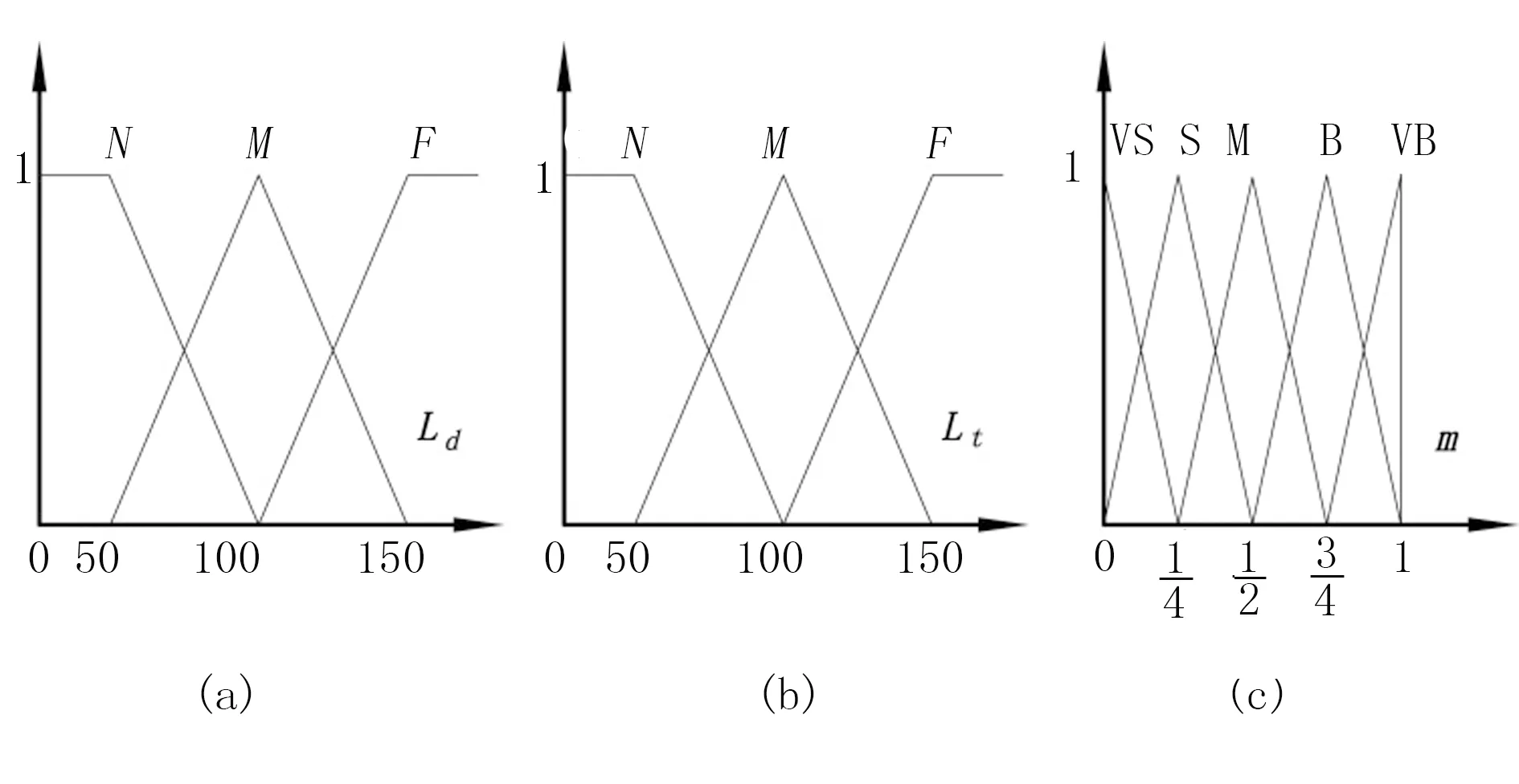
圖7 加權(quán)系統(tǒng)隸屬度函數(shù)Fig.7 Membership functions of weight analysis system
3.4 動作融合系統(tǒng)
動作融合系統(tǒng)主要完成兩大任務(wù):①實現(xiàn)避障系統(tǒng)和目標(biāo)導(dǎo)向系統(tǒng)輸出的融合;②去模糊化,輸出機器人的速度V和角位移Δθ。融合系統(tǒng)采用重心法,采用動作加權(quán)系統(tǒng)等到的加權(quán)系數(shù)m,衡量避障系統(tǒng)輸出和目標(biāo)導(dǎo)向系統(tǒng)在機器人運動的占比,來確定機器人的速度V和角位移Δθ。設(shè)vd和θd為避障系統(tǒng)輸出,vt和θt為目標(biāo)導(dǎo)向系統(tǒng)輸出,則
(1)
(2)
4 系統(tǒng)測試
機器人越障礙測試路徑如圖8所示。中心線為機器人行走路徑,虛線為機器人和目標(biāo)之間的連線,黑色部分為障礙物,六邊形為目標(biāo)。在初始位置處,兩障礙物根據(jù)避障規(guī)則,他們距離均為N,障礙物位于機器人正前方,障礙方向a為C和RM。目標(biāo)在機器人正方向上,距離很遠,根據(jù)目標(biāo)導(dǎo)引規(guī)則,距離為F,目標(biāo)方向f為C。根據(jù)加權(quán)融合規(guī)則,此時機器人速度V為1.8km/h,向左轉(zhuǎn)向π/2。

圖8 機器人移動測試Fig.8 Test for robot moving
機器人處于位置2時,兩障礙物距離均為M,障礙方向a為LM和RM;根據(jù)目標(biāo)導(dǎo)引規(guī)則,距離為M,目標(biāo)方向f為C。此時,機器人速度V為3.6km/h,不轉(zhuǎn)向;此后機器人沿著虛線路徑到達目標(biāo)位置。
5 結(jié)論
為了提高采摘效率、實現(xiàn)采摘工作的自動化,設(shè)計了一種采摘機器人避障模糊控制系統(tǒng),并基于籃球戰(zhàn)術(shù)規(guī)則制定了模糊規(guī)則庫。該系統(tǒng)共由4部分組成:①避障系統(tǒng)。該系統(tǒng)輸入為距機器人最近的兩組障礙物距離與角度,即Ldi(i=1,2),adi(i=1,2),輸出為模糊化后的vd和θd。②目標(biāo)導(dǎo)引系統(tǒng)。該系統(tǒng)輸入量為目標(biāo)距離Lt和機器人正方向與目標(biāo)位置夾角f,輸出為模糊量vf和θf。③動作加權(quán)系統(tǒng)完成目標(biāo)導(dǎo)引與避障系統(tǒng)的權(quán)重分析,輸入為機器人到目標(biāo)的距離Lt和機器人到最近障礙物的距離Ldmin,輸出值為加權(quán)系數(shù)m。④動作融合系統(tǒng)根據(jù)加權(quán)系數(shù)m完成目標(biāo)導(dǎo)引與避障的融合,輸入為模糊化后的vd和θd,以及模糊量vf和θf,輸出為機器人的速度V和轉(zhuǎn)角Δθ。系統(tǒng)檢測發(fā)現(xiàn),該系統(tǒng)具有良好的避障性能。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
計算機應(yīng)用(2022年2期)2022-03-01 12:33:42
數(shù)學(xué)小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
計算機應(yīng)用(2021年4期)2021-04-20 14:06:36
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
計算機應(yīng)用(2021年1期)2021-01-21 03:22:38
北京測繪(2020年12期)2020-12-29 01:33:58
Coco薇(2017年11期)2018-01-03 20:59:57
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45