淺析車聯網發展歷程及前景
2020-10-20 07:18:51萬能羅雅婷
汽車實用技術 2020年15期
萬能 羅雅婷
摘 要:車聯網作為物聯網時代的重要應用,正在隨著計算和通信技術的進步而飛速發展,車聯網帶來了巨大的研究價值和商業前景,是實現汽車完全自動駕駛的重要途徑。文章簡要介紹了車聯網的演進發展歷程,討論了創建車聯網所需的技術,介紹了一些車聯網環境下的主要應用,結合5G描述了車聯網領域中的主要研究方向,最后闡述了車聯網未來和發展趨勢。
關鍵詞:車聯網;自動駕駛;車載網絡通信
中圖分類號:TP212? 文獻標志碼:A? 文章編號:1671-7988(2020)15-29-04
Abstract: The Internet of Vehicles (IoV) is an important application in the era of Internet of Things, the IoV is developing rapidly with the advancement of computation and communication technologies. The IoV promises huge research value and business prospects, and it is an important way to realize fully autonomous driving of vehicle. This paper briefly introduces the evolution of IoV, discusses the technology required to create IoV, introduces some of the main applications in the IoV environment, describes the main research directions in the field of IoVwith 5G, and finally describes the IoVs future and development trends.
Keywords: Internet of Vehicles; Autonomous driving; Vehicular networking communication
CLC NO.: TP212? Document Code: A? Article ID: 1671-7988(2020)15-29-04
前言
車聯網,通常意義上是指車內和車輛間的信息交互(V2V)。隨著基礎設施的完善、硬件水平的提高、通信技術的發展、計算機運行能力的提升,車聯網的含義逐漸擴展到了車輛與基礎設施(V2I)、車輛與人(V2P)、車輛與云(V2C),統稱為車輛與X(V2X)。
早在1939年紐約世博會中,就呈現了未來高速公路和城市可能的烏托邦般的景象[1]。之后的幾十年,各個國家、尤其是西方發達國家,均以完全的高速公路的自動駕駛為目標,展開了一系列的研究。如今,許多國家都頒發了自動駕駛的汽車牌照,3GPP、ITU等組織和協會等也制定并出臺相應的標準。車聯網正在為創造真正的智能交通系統做出重要貢獻。
1 單車自動駕駛階段
上世紀六、七十年代,日本的CACS、美國的ERGS、歐洲的ALI城市道路路徑引導項目,1986-1995年的歐洲普羅米修斯自動駕駛項目,和1986-1992年美國的PATH協同駕駛項目[2]等雖然在商業上沒有達到預期的效果,但以上這些項目都產出了最終的樣車,并成功進行了實際運行的試驗。
上述項目通常將完全的高速公路的自動駕駛為目標,這意味著被研究車輛以較少依賴基礎設施為解決方案,但這一目標在當時那個時代是難以實現的。從20世紀80年代后期開始,研究逐漸轉向如駕駛人咨詢這樣的更近期的目標上,即實現自動駕駛中的某一項功能或某一項前期功能,這同時意味著研究的方向轉移到了基礎設施輔助的方案[3]。因為研究機構和管理部門等在前期工作中發現,不依賴公共基礎設施似乎無法實現真正的自動駕駛。從這以后,自動駕駛逐漸由單車系統的研究轉向車與車間通信的研究。
2 早期車聯網研究階段
1989年,日本的科學家們提出了道路-汽車通信系統(Road/Automobile Communication Systems,RACS)[4],主要提供車輛和路邊固定位置設備間的V2I通信,但通信距離較短,其功能在于向行駛車輛提供可靠的導航輔助,信息分發服務和雙向通信服務。該系統依然未能解決車-車通信的問題。
1992年,國際標準化組織(International Standards Organi -zation,ISO)為ITS通信系統定義了架構以及相應設施[5],即專用短程通信(Dedicated Short-Range Communication,DSRC)標準。隨后一些國家分配了僅僅用于車輛短程無線通信的DSRC頻段,如1999年,美國聯邦通信委員會(Federal Communication Commission,FCC)為DSRC通信專門劃分了5850至5925MHz頻段[6];歐洲電子通信委員會(Electronic Communication Committee,ECC)于2008年將5875至5925頻段內的50MHz分配給DSRC用于交通安全應用,另分配額外20MHz用于非安全應用[7]。結合1991年開始商用的2G蜂窩移動通信及之后的3G、4G,使得車輛相互之間的信息交換,實現車輛在道路上的彼此協調成為了可能。也彌補了之前無法同時實現V2V和V2I的情況。尤其是當2011年,業界開始使用基于LTE的設備到設備通信(Device to Device,D2D)協議支持車輛間的V2V通信。
在這個階段,不少主機廠和供應商紛紛參與車輛間通信(Inter-vehicle Communication,IVC)系統的研發和商業推廣,成品數量呈現爆炸式增長。如:安吉星(OnStar,1995),寶馬Assist(1999),奔馳FleetBoard(2000),TomTom HD Traffic(2007)等,使得IVC稱為現實,且在乘用車和商用車領域均有建樹,大大降低了駕駛員的工作強度,是道路運輸效率提升,同時降低了油耗,提高了經濟性。
隨著汽車產業的快速發展,汽車保有量的不斷增加,以及汽車由奢侈品逐漸向日用品轉變過程中人們對汽車觀念的改變,車聯網作為實現自動駕駛方法之一,也面臨了重要挑戰。由于車輛間的相對高速移動,只適用于低速場景的LTE-D2D難以較好的支撐V2V通信[8]。再加上自動駕駛直接涉及到車載人員的安全,其傳輸速率和時延等技術指標決定了車聯網情形下汽車執行操作的效率,如制動距離。在當前5G已經商用的情況下,以上問題都將得到很好的解決。5G無線網絡的實現,從通信技術的角度,使自動駕駛達到極致安全和99.999%的可靠性成為了可能。
3 車聯網通信新階段
5G時代的到來,給人們生活帶來了不一樣的體驗,同樣也影響到了工業與自動化領域。汽車作為人類生活中的重要角色,同樣也受到5G帶來的影響。3GPP定義了5G的三大應用場景——eMBB(Enhanced Mobile Broadband,移動寬帶增強)、mMTC (massive Machine Type of Communication,海量機器類通信,又稱為大規模物聯網)、uRLLC(Ultra-Relia -ble Low latency Communications,超高可靠低時延通信)。
其中與車聯網最為相關的是uRLLC場景,在5G環境下,空口延時小于1ms能完全滿足編隊行駛5ms和無人駕駛3ms的需要。與4G相比,無人駕駛制動智能控制反應距離可以從1.4米降至2.8cm。這意味著在編隊行駛工況下,后車與前車的跟車距離可有效減少,單位時間通過道路截面的車輛數將增加,從而提高通行效率。對于其他兩類場景mMTC和eMBB,也與車聯網有千絲萬縷的聯系,汽車作為智慧城市/智能交通系統的重要組成,其車載傳感器聯網也是物聯網的一部分;娛樂應用同樣受益與5G+車聯網的實現,下載、媒體流、多人游戲將是主要的娛樂應用[9][10],每輛車每秒的數據將達到1GB,只有5G情形下的大帶寬才有可能實現在娛樂的同時,車輛間的通信同時也能得到保障,畢竟駕乘人員的安全才是首要考慮的。
5G通信距離延伸至1km,最高相對車速可以支持500公里,通信可靠性可以做到99.99%。更高級別的自動駕駛需要5G技術提供支撐。同時,車聯網的多點傳輸、移動性管理、巨大的計算量、車聯網的通信安全、自動駕駛的道德倫理和法律管理問題等,均是當前車聯網快速發展所面臨的諸多問題[11]。
針對上述問題,目前車聯網的研究方向主要集中在以下幾大方面:
(1)無線接入技術(Wireless Access in Vehicular Environ -ment,WAVE)[12]:任何一個依賴于車輛間通信的應用都需要一組特定的網絡特性。目前車聯網的無線接入包括三個研究方向:①蜂窩網絡(C-V2X);②短程無線電;③空白頻段和認知無線電。
(2)信息傳遞[13]:主要研究車聯網網絡層協議。目標是V2X的信息交換,以及從一輛車到所有那些對內容感興趣的單元的信息傳播。從路由、信標、基于地理位置的數據/信息傳播(Geocasting)、基礎設施、延遲/中斷容錯網絡(Delay/disruption – tolerant Network, DTN)與對等網絡等幾個方面展開研究。
(3)性能評估[14]:大規模的現場試驗是復雜甚至不可行的,大多數情況下選擇仿真作為性能研究的方法。如何在IVC領域進行仿真、考慮哪些性能指標、怎樣真實和準確的對車輛運動進行建模、仿真場景等均是研究對象,此外還包括諸如人類駕駛員的行為影響、無線電傳播模型的影響都在考慮范圍之內。
(4)安全和隱私[15][16][17]:考慮車聯網的特殊性,其通信安全不僅涉及信息安全,更重要的是涉及到駕乘人員的安全。車聯網環境下,需要大量的信息傳遞,且處于相對開放的網絡,考慮新的協議來應對車聯網風險,但同時保證協議不過與復雜,有較好的運算量和時延。另外,公眾對車聯網技術接受的程度也是需要考慮的問題,其不僅取決于車聯網的技術能力,還取決于安全系統賦予的匿名水平。
4 車聯網的未來與展望
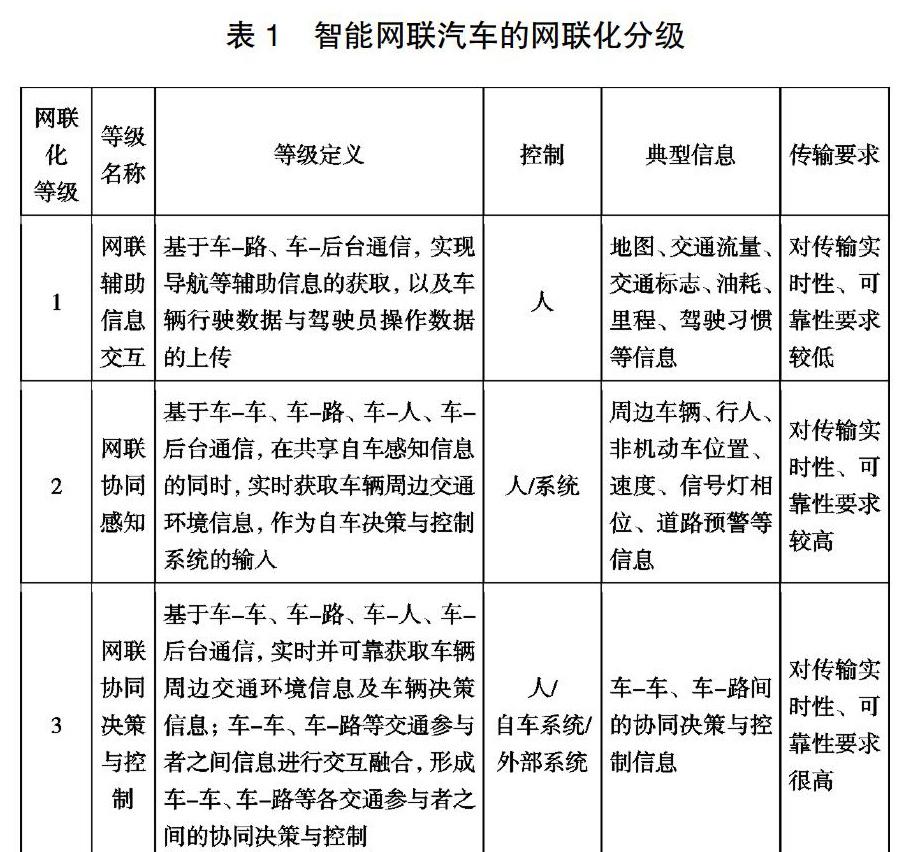
根據國際電信聯盟預測,到2030年,全球數據流量將達到驚人的5ZB/月。6G肯定是必不可少的發展階段,對車聯網以及自動駕駛也將帶來新的契機。按照移動通信網絡約10年為一個周期的規律,結合《中國制造2025》對智能網聯汽車技術路線的研究,考慮智能網聯汽車網聯化分級(如表1所示)[18],到2030年后有望實現最高級的車輛智能化與網聯化。從網聯化的角度看,即實現V2X的協同決策與控制,并在此基礎上,進一步實現全路況條件下的自動駕駛。當然,就目前存在的問題而言主要是兩大方面,一是通信網絡上需要5G網絡達到相當高程度的覆蓋水平;二是在汽車網聯化方面,需要加快V2X芯片和模組的量產裝配以及路側單元和基站等基礎設施的建設改造,此項任務更加艱巨。在未來的車聯網研究主要集中在以下四個方面:(1)車聯網環境下的人-車網絡模型和服務模型;(2)車聯網通信能力的增強;(3)人機交互的合作和實現;(4)確保車聯網中服務的適用性[19]。
車聯網的完全實現尚還有很長的路要走,但對于車聯網的研究從未止步,未來的車聯網研究既要能夠產生一個接近實際生活的有意義的結果,還要能夠推動科學技術的創新與發展,同時還要保證系統安全及用戶的隱私,由此看來,車聯網的發展任重而道遠。
